RC-HELI Радіокеровані моделі та комплектуючі
Интернет-магазин
www.rc-heli.com.ua
info@rc-heli.kiev.ua
| Артикул | Название | Описание | Единица | Розничная | ||||||||||||||||||||||||||||||
| 3DRC-AIR-A | 3DRC-AIR-A Airspeed Sensor Kit w/Pitot tube for APM | Датчик воздушной скорости аналоговый с трубкой Пито для Ardupilot APMАналоговый датчик воздушной скорости является более точным методом для полетного контроллера определить воздушную скорость, в сравнении с путевой скоростью GPS. Датчик MPXV7002 предназначен для измерения положительного и отрицательного давления. В дополнение, обладая смещением напряжения 2.5 В, вместо обычного 0 В, эта новая серия может измерять давление до 7 кПа через каждый порт замера давления или вакуума.Включенная в комплект трубка Пито для измерения избыточного, дифференциального давления идеально подойдет для установки на большинство авиамоделей. Руководство по сборке и настройке: https://code.google.com/p/ardupilot-mega/wiki/Airspeed Характеристики Дифференциальный датчик давления: MPXV7002DP Выходной сигнал: Аналоговый 0-5 В Напряжение питания: 5 В Ток потребления: 10 мА Комплектация Датчик давления - 1 шт Трубка Пито - 1 шт Соединительный шланг 30 см - 1 шт Соединительный кабель 10 см - 1 шт | комплект | 1208,40 | ||||||||||||||||||||||||||||||
| 3DRC-Mount | 3DRC-Mount FC APM, KK, MWC Glass Fiber Shock Absorber Anti-vibration Set | Площадка амортизирующая антивибрационная текстолитовая для полетных контроллеров Pixhawk, APM, KK, MWC и пр.Характеристики:— Материал: стеклотекстолит — Размеры: 100 * 80 * 10мм — Масса: 24г — Цвет черный    2 * пластиковые пластины 4 * силиконовые демпферы 2 * самоклейки 3M | комплект | 167,60 | ||||||||||||||||||||||||||||||
| 3DRC-Mount-P | 3DRC-Mount-P Flight Controller Plastic Shock Absorber Anti-vibration Set | Площадка амортизирующая антивибрационная пластиковая для полетных контроллеров APM 2.5, 2.6, KK, MWCХарактеристики:— Материал: пластик — Размеры: 95 * 57 * 16мм — Масса комплекта: 15г — Цвет черный 
 
 
 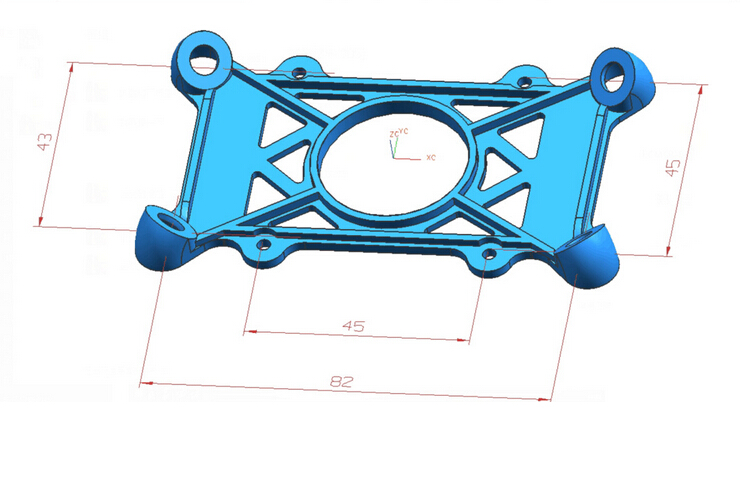 2 * текстолитовые пластины 4 * силиконовые демпферы 4 * винта M2.5 4 * гайки M2.5 3 * самоклейки 3M | комплект | 209,50 | ||||||||||||||||||||||||||||||
| 3DRC-Pixhawk | 3DRC-Pixhawk Полетный контроллер Ardupilot Pixhawk 2.43 (не оригинал) | Полетный контроллер Ardupilot Pixhawk 2.43 (не оригинал) #FC | комплект | 5536,79 | ||||||||||||||||||||||||||||||
| 3DRC-Pixhawk-set | 3DRC-Pixhawk-set Комплект полетного контроллера Ardupilot Pixhawk 2.43 + LEA-6H + OSD + Telem + BEC | Комплект полетного контроллера Ardupilot Pixhawk 2.43 + LEA-6H + OSD + Telem + BEC (не оригинал) #FC | комплект | 13780,44 | ||||||||||||||||||||||||||||||
| 3DR-Pixhawk-Asp-Sen-Kit | 3DRobitics Pixhawk Airspeed Sensor Kit w/Pitot tube | Pixhawk Airspeed Sensor Kit (оригинал 3DRobitics)Цифровой дифференциальный датчик воздушной скорости для полетного контроллера Pixhawk отличается малым смещением, высоким разрешением и самое главное - не страдает от шумов и наводок при использовании длинных кабелей.Благодаря встроенному датчику 4525DO с диапазоном измерения 1 пси (примерно до 100 м/с или 360 км/ч) Pixhawk Airspeed Sensor Kit имеет разрешение 0.84 Па, конечные данные имеют разрешение 14 бит, сырые данные приходят от дельта-сигма АЦП с разрешением 24 бита. Так же датчик измеряет температуру, чтобы вычислить истинную воздушную скорость от приборной скорости, используя датчик MS5611 статического давления на Pixhawk. На датчик не влияет теплота близлежащих компонентов, поэтому он более точно показывает воздушную температуру чем ранее выпускаемые аналоговые датчики. Поддерживается всеми версиями плат Pixhawk и PX4. Монтажные отверстия M3 / 6-32. Комплектация: датчик скорости резиновая трубка трубка Пито 4х жильный кабель шины I2C | комплект | 3571,33 | ||||||||||||||||||||||||||||||
| BGID1145537 | 80dB Sound and 10lm LED Alarm Active Buzzer for NAZE32 F3 F4 Flight Controller [1145537] | Буззер-пищалка 80дБ (активный) 5В со светодиодным маяком 10лм для подключения к полетным контроллерам типа NAZE32 F3 F4 и пр.Отдельно подключать светодиод не требуется, звук и свет работают синхронноХарактеристики: Звук: 80 dB Свет: 10lm Питание: 5V Масса: 1.3g Размеры: 13mm*12mm*6mm 
 | шт. | 125,70 | ||||||||||||||||||||||||||||||
| AB-80099 | AirBot Omnibus F4 Fireworks v2 [AB-80099] | Полетный контроллер AirBot Omnibus F4 Fireworks v2 (оригинал)Особенности Улучшенная плата PDBМеньше шумов в цепях питания Цифровой датчик тока (стабильно высокая точность) Два дополнительных порта UART/I2C   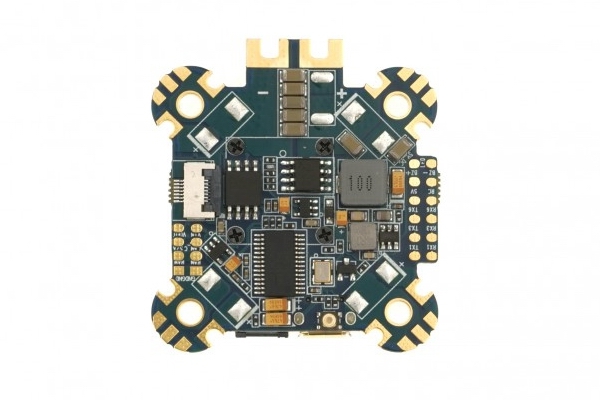 Характеристики Назначение Мультикоптеры Основной контроллер STM32F4 Прошивка BetaFlight Стабилизация ISM20608 (6DOF 32KHz) Компас Нет Барометр Есть BlackBox Flash (16MB) Количество PWM входов 0 Количество PWM выходов 4 Интерфейс периферии UART | I2C | DigitalLED Интерфейс приёмника PPM | S.BUS Протоколы PWM | Oneshot125 | Oneshot42 | Multishot | PWM (колл. двигатели) | DSHOT150 | DSHOT300 | DSHOT600 | DSHOT1200 | PROSHOT1000 Количество портов UART (общее) 5 Количество портов I2C 0 Количество портов SPI 0 Количество портов CAN 0 OSD Встроенный AB7456 Выход на регулятор 4-в-1 Нет USB порт Есть PDB Есть Выход BEC 1 5 В 1 А Выход BEC 2 8 В 1 А + LC-фильтр Датчик тока Есть Датчик напряжения батареи Есть Пищалка Внешняя Поддержка светодиодов WS2811 Отладочный интерфейс USB Питание приёмника от USB Есть Входное напряжение 11 — 25 В Монтажное крепление 30,5х30,5 мм Размеры установочных отверстий 3 мм Размеры 42х46х10 мм Вес 13,5 г Комплектация Полетный контроллер - 1 шт Дополнительно необходимо Кабель USB-MicroUSB - 1 шт (для настройки и программирования) | шт. | 1765,78 | ||||||||||||||||||||||||||||||
| AB-80067 | AirBot Omnibus F4 v5.1 [AB-80067] | Полетный контроллер AirBot Omnibus F4 v5.1 (оригинал)ОсобенностиПоддержка подключения 2-6S Li-Pol Встроенный барометр BMP280 6 PWM выходов Слот для MicroSD   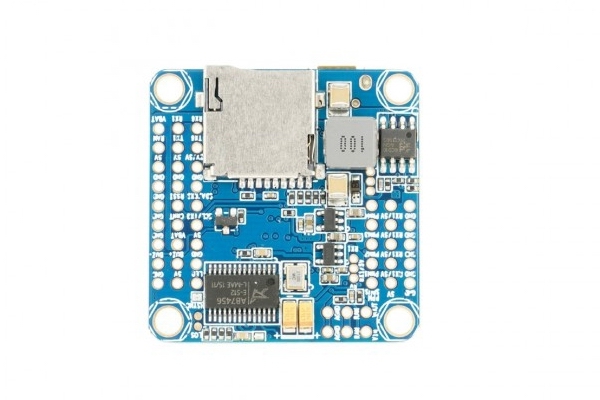 Характеристики Система стабилизации Назначение Мультикоптеры Основной контроллер STM32F4 Прошивка Betaflight Стабилизация MPU6000 (6DOF 8KHz) Компас Нет Барометр BMP280 BlackBox MicroSD Количество PWM входов 0 Количество PWM выходов 6 Интерфейс периферии UART | ADC | RSSI | I2C | SPI | SmartAudio | DigitalLED Интерфейс приёмника PPM | S.BUS | DSM2 Протоколы PWM; Oneshot125; Oneshot42; Multishot; PWM (коллекторные двигатели); DSHOT150; DSHOT300; DSHOT600; DSHOT1200; PROSHOT1000 Количество портов UART (общее) 6 Количество портов I2C 1 Количество портов SPI 0 Количество портов CAN 0 OSD Встроенный AB7456 Выход на регулятор 4-в-1 Есть USB порт Есть PDB Нет Выход BEC 5В 1А Датчик тока Нет Датчик напряжения батареи Есть Пищалка Внешняя Поддержка светодиодов WS2811 Отладочный интерфейс USB Питание приёмника от USB Есть Входное напряжение 11 — 25 В Монтажное крепление 30,5х30,5 мм Размеры установочных отверстий 3мм Комплектация Полетный контроллер - 1 шт Дополнительно необходимо Кабель USB-MicroUSB - 1 шт (для настройки и программирования) | шт. | 1306,02 | ||||||||||||||||||||||||||||||
| Pixhawk-Asp-Sen-Kit | Airspeed Digital Sensor Kit w/Pitot tube for Pixhawk PX4 [Pixhawk-Asp-Sen-Kit] | Датчик воздушной скорости цифровой для Ardupilot PixhawkЦифровой датчик воздушной скорости является более точным методом для полетного контроллера определить воздушную скорость, в сравнении с путевой скоростью GPS. Датчик MS4525D предназначен для измерения положительного и отрицательного давления. В дополнение, обладая смещением напряжения 2.5 В, вместо обычного 0 В, эта новая серия может измерять давление до 7 кПа через каждый порт замера давления или вакуума.Включенная в комплект трубка Пито для измерения избыточного, дифференциального давления идеально подойдет для установки на большинство авиамоделей. Характеристики Протокол обмена: I2C Датчик: MS4525D Напряжение питания: 2,7-5,5 В Ток потребления: 12 мА Разрешение датчика давления: 14бит Температурная компенсация: Есть Комплектация Датчик - 1 шт Трубка Пито - 1 шт Соединительный шланг - 1 шт 4х жильный кабель шины I2C | комплект | 2262,60 | ||||||||||||||||||||||||||||||
| Pixhawk-Asp-Sen-Kit-p | Airspeed Digital Sensor Kit w/Pitot tube for Pixhawk PX4 [Pixhawk-Asp-Sen-Kit-p] | Датчик воздушной скорости цифровой для Ardupilot PixhawkЦифровой датчик воздушной скорости является более точным методом для полетного контроллера определить воздушную скорость, в сравнении с путевой скоростью GPS. Датчик MS4525D предназначен для измерения положительного и отрицательного давления. В дополнение, обладая смещением напряжения 2.5 В, вместо обычного 0 В, эта новая серия может измерять давление до 7 кПа через каждый порт замера давления или вакуума.Включенная в комплект трубка Пито для измерения избыточного, дифференциального давления идеально подойдет для установки на большинство авиамоделей. Характеристики Протокол обмена: I2C Датчик: MS4525D Напряжение питания: 2,7-5,5 В Ток потребления: 12 мА Разрешение датчика давления: 14бит Температурная компенсация: Есть Комплектация Датчик - 1 шт Трубка Пито (пластиковая муфта) - 1 шт Соединительный шланг - 1 шт 4х жильный кабель шины I2C | комплект | 2239,97 | ||||||||||||||||||||||||||||||
| APM-ASP-Sen | Airspeed Sensor MPXV7002DP for Ardupilot APM 2.6 [APM-ASP-Sen] | Датчик воздушной скорости аналоговый для Ardupilot APMАналоговый датчик воздушной скорости является более точным методом для полетного контроллера определить воздушную скорость, в сравнении с путевой скоростью GPS. Датчик MPXV7002 предназначен для измерения положительного и отрицательного давления. В дополнение, обладая смещением напряжения 2.5 В, вместо обычного 0 В, эта новая серия может измерять давление до 7 кПа через каждый порт замера давления или вакуума.Шланг и трубка Пито в комплект не входят! Руководство по сборке и настройке: https://code.google.com/p/ardupilot-mega/wiki/Airspeed Характеристики Дифференциальный датчик давления: MPXV7002DP Выходной сигнал: Аналоговый 0-5 В Напряжение питания: 5 В Ток потребления: 10 мА Комплектация Датчик давления - 1 шт | комплект | 838,00 | ||||||||||||||||||||||||||||||
| APM-ASP-MPXV7002DP | Airspeed Sensor MPXV7002DP w/Pitot tube combo for Ardupilot APM 2.6 [APM-ASP-MPXV7002DP] | Датчик воздушной скорости MPXV7002DP с трубкой Пито для Ardupilot APM 2.6 | комплект | 1520,97 | ||||||||||||||||||||||||||||||
| BGID940937 | Arduino Nano V3 ATmega328P Controller Improved Version Module Geekcreit for Arduino [940937] | Arduino Nano V3.0 с нераспаянными коннекторами – маленькая, самодостаточная, разъемо-совместимая с макетками плата на микроконтроллере ATmega328.
Она более-менее совпадает по функциональности с Arduino Duemilanove/Uno, но имеет другой форм-фактор. Arduino Nano недостает только разъема питания и вместо стандартного использует Mini-B USB кабель (кабель отсутствует в комплекте). Данная плата отличается корпусом микросхемы TQFP-32 и нераспаяными контактами, что позволяет использовать ее в портативных устройствах. Реплика оригинальной платы, производство - Китай. Для подключения к компьютеру используется микросхема CH340G. Arduino Nano может быть запитана от Mini-B USB разъема или внешнего источника питания 6-12В (пин "Vin") или 5В стабильного внешнего питания (пин "5V"). Питание автоматически переключается на источник с более высоким напряжением. Внимание! В версиях Arduino IDE выше 1.6.20 появилась опция выбора версии бутлоадера (по умолчанию - новый), поэтому, старые версии плат могут не реагировать на программирование по USB. Характеристики: Микроконтроллер: ATmega328P Тип корпуса: TQFP-32 Рабочее напряжение (логические уровни): 5В Входное напряжение (рекомендованное): 7-12В Цифровых входов/выходов: 14 (из которых 6 могут быть использованы как ШИМ) Аналоговых входов: 6 Сила тока на входах/выходах: 40 мА Сила тока для 3.3В выхода: 50 мА Память: 32 кБ из которых 2кБ используется бутлоадером SRAM: 2 кБ EEPROM: 1 кБ Частота: 16 МГц | шт. | 144,56 | ||||||||||||||||||||||||||||||
| APM-AT328-5V-16M | Arduino Pro Mini (5V, 16Mhz) w/ATmega328 [APM-AT328-5V-16M] | Arduino интерфейс на чипе ATmega328 (5V, 16Mhz)Features:• ATmega328 running at 16MHz with external resonator (0.5% tolerance) • USB connection off board • Supports auto-reset • 5V regulator • Reverse polarity protected • DC input 5V up to 12V • On board Power and Status LEDs Dimensions: • 0.7×1.3″ (18×33mm) • Less than 2 grams Summary Microcontroller ATmega328 Operating Voltage 3.3V or 5V (depending on model) Input Voltage 3.35 −12 V (3.3V model) or 5 — 12 V (5V model) Digital I/O Pins 14 (of which 6 provide PWM output) Analog Input Pins 6 DC Current per I/O Pin 40 mA Flash Memory 32 KB (of which 2 KB used by bootloader) SRAM 2 KB EEPROM 1KB Clock Speed 8 MHz (3.3V model) or 16 MHz (5V model) Power The Arduino Pro Mini can be powered with an FTDI cable or breakout board connected to its six pin header, or with a regulated 3.3V or 5V supply (depending on the model) on the Vcc pin or an unregulated supply on the RAW pin. The power pins are as follows: RAW. For supplying a raw (unregulated) voltage to the board. VCC. The regulated 3.3 or 5 volt supply. GND. Ground pins. Memory The ATmega328 has 32 KB of flash memory for storing code (of which 2 KB is used for the bootloader). It has 2 KB of SRAM and 1 KB of EEPROM (which can be read and written with the EEPROM library). Input and Output Each of the 14 digital pins on the Pro Mini can be used as an input or output, using pinMode(), digitalWrite(), and digitalRead() functions. They operate at 3.3 or 5 volts (depending on the model). Each pin can provide or receive a maximum of 40 mA and has an internal pull-up resistor (disconnected by default) of Serial: 0 (RX) and 1 (TX). Used to receive (RX) and transmit (TX) TTL serial data. These pins are connected to the TX-0 and RX-1 pins of the six pin header. External Interrupts: 2 and 3. These pins can be configured to trigger an interrupt on a low value, a rising or falling edge, or a change in value. See the attachInterrupt() function for details. PWM: 3, 5, 6, 9, 10, and 11. Provide SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). These pins support SPI communication, which, although provided by the underlying hardware, is not currently included in the Arduino language. LED: 13. There is a built-in LED connected to digital pin 13. When the pin is HIGH value, the LED is on, when the pin is LOW, it’s off. The Pro Mini has 6 analog inputs, each of which provide 10 bits of resolution (i.e. 1024 different values). Four of them are on the headers on the edge of the board; two (inputs 4 and 5) on holes in the interior of the board. The analog inputs measure from ground to VCC. Additionally, some pins have specialized functionality: I2C: 4 (SDA) and 5 (SCL). Support I2C (TWI) communication using the Wire library. There is another pin on the board: Reset. Bring this line LOW to reset the microcontroller. Typically used to add a reset button to shields which block the one on the board. | шт. | 377,10 | ||||||||||||||||||||||||||||||
| HK009000002 | Arduino Sensor Shield V4 digital analog module (24778) [009000002] | Arduino Интерфейс датчиков V4, цифровые и аналоговые входыThe Arduino Sensor Shield V4.0 allows plug and play connection to various modules like sensors, servos, relays, buttons, potentiometers and more. Each functional module has a buckled port with VCC, GND and Output, which has a corresponding port on the Sensor Shield, connected with a 2.54mm dual-female cable.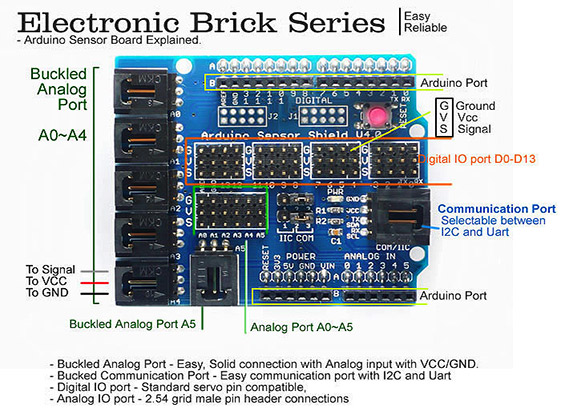 Features :
Features : — Plug & play. — Operating Voltage: 5VDC — Input Voltage (recommended): 7-12VDC — Input Voltage (limits): 6-20VDC — Buckled Analog Port : Handy, solid connection to 6 Analog inputs with VCC/GND — Digital IO port : 13 ports prepared to digital modules or servos — Analog IO Port : 2.54 grid male pin header connections — Buckled Communication Port : Selectable between I2C and UART — Weight 28g Includes: | комплект | 544,70 | ||||||||||||||||||||||||||||||
| HK009000001 | Arduino Uno - Atmel Atmega 328-PU (23767) [009000001] | Платформа с открытым кодом Arduino Uno на чипе Atmel Atmega 328-PU для построения управляющей электроникиArduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It’s intended for artists, designers, hobbyists, and anyone interested in creating interactive objects or environments.Arduino can sense the environment by receiving input from a variety of sensors and can affect its surroundings by controlling lights, motors, and other actuators. The microcontroller on the board is programmed using the Arduino programming language (based on Wiring) and the Arduino development environment (based on Processing). Arduino projects can be stand-alone or they can communicate with software running on a computer (e.g. Flash, Processing, MaxMSP). *Note: This is not an original Arduino brand product, it is manufactured with the same components and functionality by a different manufacturer. Specifications | комплект | 1133,40 | ||||||||||||||||||||||||||||||
| 3DRC-APM-set | Ardupilot APM 2.6 + NEO-6M + OSD + Telem Комплект полетного контроллера (не оригинал) [3DRC-APM-set] | Комплект полетного контроллера Ardupilot APM2.6 + NEO-6M + OSD + Telem (не оригинал) | комплект | 6517,78 | ||||||||||||||||||||||||||||||
| APM2_6-FC | Ardupilot APM 2.6 Flight Control Board Exterbal Compass w/ Protective Case [APM2_6-FC] | Полетный контроллер APM 2.6 ArduPilot в защитном боксеПолетный контроллер Ardupilot Mega (АРМ) позволяет превратить практически любую радиоуправляемую модель в полностью автономное устройство, способное выполнять широкий спектр задач, в том числе «полет по точкам». Этот полетный контроллер считается одним из самых лучших в соотношении цена/качество. Кроме того, он постоянно совершенствуется и дорабатывается. Это последняя версия одной из самых популярных и мощных плат управления беспилотными летательными аппаратами APM версии 2.6. Плата управления (т.н. «мозги») совмещает в себе не только вычислительную мощь, управляющую контроллерами моторов или сервами, но и набор датчиков (акселерометр, гироскоп, барометр), на основании показаний которых корректируется алгоритм полета. Подходит как для использования мульти-коптеров, так и для самолетов, планеров, вертолетов и машин. Главной фишкой платы является функция автопилота, благодаря которой ваш аппарат может самостоятельно перемещаться по заданным точкам без какого-либо вмешательства со стороны пилота. Плата имеет открытые исходники, благодаря чему ее успешно производит большое количество производителей и мы имеем возможность продавать ее по цене ниже чем в официальном магазине. Версия 2.6 отличается от предыдущей версии 2.5.2 отсутствием на борту компаса (да, не всегда новая версия несет в себе преимущества, иногда что-то и убирают), команда-разработчик платы решили, что компас лучше выносить отдельно, дабы на него не влияли электромагнитные импульсы от силовой части аппарата, а чтобы удешевить себестоимость встроенный убрали. Отдельно стоит сказать о программе, с помощью которой производится первичная настройка и программирование платы — это свободно-распространяемое ПО Mission Planner от команды DIY drones. Возможности его превосходят многие платные аналогичные программы, оно позволяет делать как тонкую настройку вашего аппарата, так и быструю с помощью мастера, снимать показания датчиков, строить план полета (просто тыкаем мышкой на карте указывая маршрут движения аппарата), симулировать полет для получения навыков ручного управления, просматривать логи (на плате есть отдельная микросхема памяти для логгирования данных полета, т.н. «черный ящик») и многое другое. Плата сопровождается подробной документацией (есть переводы и на русский язык), некоторые манипуляции (например такие как калибровка датчиков) представлены на видео. Характеристики: Arduino совместимая Ссылки: ArduPlane мануал(для использовании с самолетами) В комплект входит: APM 2.6 в полностью собранном виде в корпусе | комплект | 2832,44 | ||||||||||||||||||||||||||||||
| APM2_6-NEO7M-set | Ardupilot APM 2.6 Flight Controller + Ublox NEO-7M 7M GPS w/ compass [APM2_6-NEO7M-set] | Полетный контроллер APM 2.6 +модуль GPS Ublox NEO-7M с компасомDescription: The APM 2.6 is a complete open source autopilot system and the bestselling technology that won the prestigious 2012 Outback Challenge UAV competition. It allows the user to turn any fixed, rotary wing or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints. Available with top or side connectors. This revision of the board has no onboard compass, which is designed for vehicles (especially multicopters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. (On fixed wing aircraft it’s often easier to mount APM far enough away from the motors and ESCs to avoid magnetic interference, so this is not as critical, but APM 2.6 gives more flexibility in that positioning and is a good choice for them, too). This is designed to be used with the 3DR uBlox GPS with Compass (see option below), so that the GPS/Compass unit can be mounted further from noise sources than APM itself. APM 2.6 requires a GPS unit with an onboard compass for full autonomy. If you are using APM 2.6 with a GPS module that does not have a compass sensor, you must use a stand-alone external compass. Arduino Compatible! Package includes: - 1* APM2.6 Board- 1* 7M GPS with shell - 1* APM2.6 Shell | комплект | 3502,04 | ||||||||||||||||||||||||||||||
| GLB-102210 | Ardupilot APM 2.6 Set (External Compass)+Ublox NEO-6M GPS+APM CS XT60 (no BEC) [GLB-102210] | Полетный контроллер APM2.6 Set(External Compass)+Ublox NEO-6M GPS+APM CS XT60, без питания контроллера (Side Pin Case)Description: The APM 2.6 is a complete open source autopilot system and the bestselling technology that won the prestigious 2012 Outback Challenge UAV competition. It allows the user to turn any fixed, rotary wing or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints. Available with top or side connectors. This revision of the board has no onboard compass, which is designed for vehicles (especially multicopters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. (On fixed wing aircraft it’s often easier to mount APM far enough away from the motors and ESCs to avoid magnetic interference, so this is not as critical, but APM 2.6 gives more flexibility in that positioning and is a good choice for them, too). This is designed to be used with the 3DR uBlox GPS with Compass (see option below), so that the GPS/Compass unit can be mounted further from noise sources than APM itself. APM 2.6 requires a GPS unit with an onboard compass for full autonomy. If you are using APM 2.6 with a GPS module that does not have a compass sensor, you must use a stand-alone external compass. Arduino Compatible! APM Power: Need to connect 5V, only current sensor includedSpecifications: Max input voltage: 25V Package includes: APM 2.6 main board | комплект | 4729,46 | ||||||||||||||||||||||||||||||
| 3DRC-APM | Ardupilot APM 2.6 Полетный контроллер (не оригинал) [3DRC-APM] | Полетный контроллер Ardupilot APM2.6 (не оригинал)Полетный контроллер Ardupilot Mega (АРМ) позволяет превратить практически любую радиоуправляемую модель в полностью автономное устройство, способное выполнять широкий спектр задач, в том числе «полет по точкам». Этот полетный контроллер считается одним из самых лучших в соотношении цена/качество. Кроме того, он постоянно совершенствуется и дорабатывается. Это последняя версия одной из самых популярных и мощных плат управления беспилотными летательными аппаратами APM версии 2.6. Плата управления (т.н. «мозги») совмещает в себе не только вычислительную мощь, управляющую контроллерами моторов или сервами, но и набор датчиков (акселерометр, гироскоп, барометр), на основании показаний которых корректируется алгоритм полета. Подходит как для использования мульти-коптеров, так и для самолетов, планеров, вертолетов и машин. Главной фишкой платы является функция автопилота, благодаря которой ваш аппарат может самостоятельно перемещаться по заданным точкам без какого-либо вмешательства со стороны пилота. Плата имеет открытые исходники, благодаря чему ее успешно производит большое количество производителей и мы имеем возможность продавать ее по цене ниже чем в официальном магазине. Версия 2.6 отличается от предыдущей версии 2.5.2 отсутствием на борту компаса (да, не всегда новая версия несет в себе преимущества, иногда что-то и убирают), команда-разработчик платы решили, что компас лучше выносить отдельно, дабы на него не влияли электромагнитные импульсы от силовой части аппарата, а чтобы удешевить себестоимость встроенный убрали. Отдельно стоит сказать о программе, с помощью которой производится первичная настройка и программирование платы — это свободно-распространяемое ПО Mission Planner от команды DIY drones. Возможности его превосходят многие платные аналогичные программы, оно позволяет делать как тонкую настройку вашего аппарата, так и быструю с помощью мастера, снимать показания датчиков, строить план полета (просто тыкаем мышкой на карте указывая маршрут движения аппарата), симулировать полет для получения навыков ручного управления, просматривать логи (на плате есть отдельная микросхема памяти для логгирования данных полета, т.н. «черный ящик») и многое другое. Плата сопровождается подробной документацией (есть переводы и на русский язык), некоторые манипуляции (например такие как калибровка датчиков) представлены на видео. Характеристики: Arduino совместимая Ссылки: ArduPlane мануал(для использовании с самолетами) В комплект входит: APM 2.6 в полностью собранном виде в корпусе | комплект | 1676,00 | ||||||||||||||||||||||||||||||
| 3DRC-APM-6H-set | Ardupilot APM 2.8 + LEA-6H + OSD + Telem + BEC Комплект полетного контроллера (не оригинал) [3DRC-AP | Комплект полетного контроллера Ardupilot APM2.8 + LEA-6H + OSD + Telem + BEC (не оригинал) | комплект | 8286,89 | ||||||||||||||||||||||||||||||
| 3DRC-APM2_8-GPS-PM | Ardupilot APM 2.8 + M8N + PM, Полетный контроллер (не оригинал) [3DRC-APM2.8] | Полетный контроллер Ardupilot APM2.8 + модуль GPS Ublox M8N с компасом + модуль питания с датчиком тока (не оригинал)Полетный контроллер Ardupilot Mega (АРМ) позволяет превратить практически любую радиоуправляемую модель в полностью автономное устройство, способное выполнять широкий спектр задач, в том числе «полет по точкам». Этот полетный контроллер считается одним из самых лучших в соотношении цена/качество. Кроме того, он постоянно совершенствуется и дорабатывается. Это последняя версия одной из самых популярных и мощных плат управления беспилотными летательными аппаратами APM версии 2.8. Плата управления (т.н. «мозги») совмещает в себе не только вычислительную мощь, управляющую контроллерами моторов или сервами, но и набор датчиков (акселерометр, гироскоп, барометр), на основании показаний которых корректируется алгоритм полета. Подходит как для использования мульти-коптеров, так и для самолетов, планеров, вертолетов и машин. Главной фишкой платы является функция автопилота, благодаря которой ваш аппарат может самостоятельно перемещаться по заданным точкам без какого-либо вмешательства со стороны пилота. Плата имеет открытые исходники, благодаря чему ее успешно производит большое количество производителей и мы имеем возможность продавать ее по цене ниже чем в официальном магазине. Версия 2.8 отличается от предыдущей версии 2.6 наличием на борту компаса и несколько измененным положением разъемов GPS Отдельно стоит сказать о программе, с помощью которой производится первичная настройка и программирование платы — это свободно-распространяемое ПО Mission Planner от команды DIY drones. Возможности его превосходят многие платные аналогичные программы, оно позволяет делать как тонкую настройку вашего аппарата, так и быструю с помощью мастера, снимать показания датчиков, строить план полета (просто тыкаем мышкой на карте указывая маршрут движения аппарата), симулировать полет для получения навыков ручного управления, просматривать логи (на плате есть отдельная микросхема памяти для логгирования данных полета, т.н. «черный ящик») и многое другое. Плата сопровождается подробной документацией (есть переводы и на русский язык), некоторые манипуляции (например такие как калибровка датчиков) представлены на видео. Характеристики: Arduino совместимая Ссылки: ArduPlane мануал(для использовании с самолетами) В комплект входит: APM 2.8 в полностью собранном виде в корпусе | комплект | 2702,55 | ||||||||||||||||||||||||||||||
| APM2_8-sp-mount | Ardupilot APM 2.8 Flight Controller w/ compass (side pin) with mount [APM2_8-sp-mount] | Полетный контроллер APM2.8 с компасом (горизонтальные контакты) с площадкой виброразвязкиAPM V2.8.0 description:- This version eliminates the 1.0mm 6P SM06B GPS interface of V2.52 old version, and change it into DF13-4P I2C external compass interface. - Put DF13-5P GPS interface with external compass interface, convenient for the connection of GPS and externalcompass. - V2.52 I2C interface changes to multifunctional MUX interface - Modified version added isolation resistor, when the OSD interface used with telemetry, the interfaces is effectively avoided - V2.52 version 3.5V power supply adopts IPS79133, 6V withstand voltage, output current 100mA, need to supply power for six IC, slightly inadequate power supply ability, easy to be burnt dwon. The new version adopts US LP2985-3.3, 16V withstand voltage, more reliable, redcucing the possibility of Bad Gyro health APM V2.8.0 Flight Controller - Needle: staight - Power supply: LP2985-3.3 - Max voltage: 16V - Add a 47uF tantalum capacitor - Port: MUX (UART0, UART2, mnnI2 and OSD are optional, OSD is the defaulted output) Jumper cap choose: - Built-in compass: plug the jumper cap in the MAG pin header. - External compass: pull up the jumper cap from the MAG pin header. Package Included: - 1pcs APM2.8 Flight Controller Board - 1pcs APM2.8 Case - 1pcs shock absorber - 5pc servo cables | комплект | 2182,89 | ||||||||||||||||||||||||||||||
| 3DRC-APM2_8 | Ardupilot APM 2.8 Полетный контроллер (не оригинал) [3DRC-APM2.8] | Полетный контроллер Ardupilot APM2.8 (не оригинал)Полетный контроллер Ardupilot Mega (АРМ) позволяет превратить практически любую радиоуправляемую модель в полностью автономное устройство, способное выполнять широкий спектр задач, в том числе «полет по точкам». Этот полетный контроллер считается одним из самых лучших в соотношении цена/качество. Кроме того, он постоянно совершенствуется и дорабатывается. Это последняя версия одной из самых популярных и мощных плат управления беспилотными летательными аппаратами APM версии 2.8. Плата управления (т.н. «мозги») совмещает в себе не только вычислительную мощь, управляющую контроллерами моторов или сервами, но и набор датчиков (акселерометр, гироскоп, барометр), на основании показаний которых корректируется алгоритм полета. Подходит как для использования мульти-коптеров, так и для самолетов, планеров, вертолетов и машин. Главной фишкой платы является функция автопилота, благодаря которой ваш аппарат может самостоятельно перемещаться по заданным точкам без какого-либо вмешательства со стороны пилота. Плата имеет открытые исходники, благодаря чему ее успешно производит большое количество производителей и мы имеем возможность продавать ее по цене ниже чем в официальном магазине. Версия 2.8 отличается от предыдущей версии 2.6 наличием на борту компаса и несколько измененным положением разъемов GPS Отдельно стоит сказать о программе, с помощью которой производится первичная настройка и программирование платы — это свободно-распространяемое ПО Mission Planner от команды DIY drones. Возможности его превосходят многие платные аналогичные программы, оно позволяет делать как тонкую настройку вашего аппарата, так и быструю с помощью мастера, снимать показания датчиков, строить план полета (просто тыкаем мышкой на карте указывая маршрут движения аппарата), симулировать полет для получения навыков ручного управления, просматривать логи (на плате есть отдельная микросхема памяти для логгирования данных полета, т.н. «черный ящик») и многое другое. Плата сопровождается подробной документацией (есть переводы и на русский язык), некоторые манипуляции (например такие как калибровка датчиков) представлены на видео. Характеристики: Arduino совместимая Ссылки: ArduPlane мануал(для использовании с самолетами) В комплект входит: APM 2.8 в полностью собранном виде в корпусе | комплект | 1445,55 | ||||||||||||||||||||||||||||||
| APMpro-N6M-PM | Ardupilot APM PRO MINI Flight Controller Board + Ublox NEO 6M GPS Module + Power Module for Quadcopt | Полетный контроллер MINI APM PRO Flight Controller Board + модуль GPS Ublox NEO 6M + модуль питания с датчиком токаSome Changes for This Mini APM Pro: NEO-6M Ublox/u-blox GPS Module for mini APM pro These are Pre-configured, Flashed with the correct settings, and tested. To make them Plug and Play. 
 
 Description: Specification: Package including : | комплект | 3548,20 | ||||||||||||||||||||||||||||||
| APM2_6-set | Ardupilot APM2.6 Flight Controller w/GPS/MAG/OSD/DataLink 915MHz [APM2_6-set] | Полетный контроллер APM 2.6 ArduPilot + GPS, компас + OSD + 915MHz радиомодемы + Датчик напряженияПолный комплект полетного контроллера APM 2.6 с MinimOSD, GPS модулем, датчиком напряжения и тока, радиомодемами для телеметрии и удаленного управления/настройки на 915mHz. При помощи радиомодемов можно получать полную телеметрию и осуществлять удаленное управление моделью с компютера на Windows или планшета/телефона на Android. Радиомодемы работают на 915mHz так что не будут вступать в конфликт с вашей радиоаппаратурой. Прямо во время полета вы можете корректировать маршрут или давать команды модели (возврат домой, полет в определенную точку по клику на карте). Полетный контроллер Ardupilot Mega (АРМ) позволяет превратить практически любую радиоуправляемую модель в полностью автономное устройство, способное выполнять широкий спектр задач, в том числе «полет по точкам». Этот полетный контроллер считается одним из самых лучших в соотношении цена/качество. Кроме того, он постоянно совершенствуется и дорабатывается. Это последняя версия одной из самых популярных и мощных плат управления беспилотными летательными аппаратами APM версии 2.6. Плата управления (т.н. «мозги») совмещает в себе не только вычислительную мощь, управляющую контроллерами моторов или сервами, но и набор датчиков (акселерометр, гироскоп, барометр), на основании показаний которых корректируется алгоритм полета. Подходит как для использования мульти-коптеров, так и для самолетов, планеров, вертолетов и машин. Главной фишкой платы является функция автопилота, благодаря которой ваш аппарат может самостоятельно перемещаться по заданным точкам без какого-либо вмешательства со стороны пилота. Плата имеет открытые исходники, благодаря чему ее успешно производит большое количество производителей и мы имеем возможность продавать ее по цене ниже чем в официальном магазине. Версия 2.6 отличается от предыдущей версии 2.5.2 отсутствием на борту компаса, команда-разработчик платы решили, что компас лучше выносить отдельно, дабы на него не влияли электромагнитные импульсы от силовой части аппарата, а чтобы удешевить себестоимость встроенный убрали. Отдельно стоит сказать о программе, с помощью которой производится первичная настройка и программирование платы — это свободно-распространяемое ПО Mission Planner от команды DIY drones. Возможности его превосходят многие платные аналогичные программы, оно позволяет делать как тонкую настройку вашего аппарата, так и быструю с помощью мастера, снимать показания датчиков, строить план полета (просто тыкаем мышкой на карте указывая маршрут движения аппарата), симулировать полет для получения навыков ручного управления, просматривать логи (на плате есть отдельная микросхема памяти для логгирования данных полета, т.н. «черный ящик») и многое другое. Плата сопровождается подробной документацией (есть переводы и на русский язык), некоторые манипуляции (например такие как калибровка датчиков) представлены на видео. Характеристики: Arduino совместимая Ссылки: ArduPlane мануал(для использовании с самолетами) В комплект входит: APM 2.6 в полностью собранном виде в корпусе | комплект | 6808,75 | ||||||||||||||||||||||||||||||
| 3DRC-miniAPM | Ardupilot miniAPM 3.1 Полетный контроллер (не оригинал) [3DRC-miniAPM] | Полетный контроллер Ardupilot miniAPM 3.1 (не оригинал) | комплект | 2346,40 | ||||||||||||||||||||||||||||||
| HK421000001 | Arkbird Autopilot System w/OSD V3.1020 (GPS/Altitude Hold/Auto-Level) [421000001/31162] | Автопилот Arkbird с OSD V3.1020 (GPS/Удержание высоты/Авто-выравнивание)Автопилот Arkbird с OSD является системой "все-в-одном" для осуществления полетов FPV на вашей модели. Особенностью системы является полет по отмеченным точкам GPS, функция "Возврат домой", автоматическое выравнивание, удержание заданной высоты и много других! Автопилот использует датчики давления и высоты для стабилизации и управления полетом.Функция "Возврат домой" может быть включена в любой момент полета и вернет вашу модель к точке взлета, а также включится автоматически при пропадании связи с радиопередатчиком. Интегрированная система OSD отображает всю необходимую для полета информацию, такую как высота полета, направление, указание точки возврата, угол крена и тангажа и т.д. Система также имеет датчик постоянного тока с разъемами XT60, так что вы можете отслеживать уровень заряда аккумулятора. Автопилот Arkbird поставляется со всем, что необходимо для его установки на FPV модель. Кроме этого, автопилот разработан установки без применения пайки по принципу "plug and play". Силовые питающие провода и разъемы также уже установлены. 
 Особенности: • система GPS, датчик давления и высоты для стабилизации и управления полетом. • Интегрированная OSD • Функция "Возврат домой" • 4 точки навигации по GPS • Полет по заданному маршруту "Cruise Flight" • Автоматическое выравнивание • Простая установка Характеристики: Контроллер Arkbird Autopilot Размеры: 50x38x14мм Вес: 26.5г Модуль GPS Gstar R-15E Размеры: 44x34x12мм Вес: 19г Комплектация: Система Arkbird Autopilot с OSD Модуль GPS Датчик тока Все необходимые кабеля | комплект | 9929,67 | ||||||||||||||||||||||||||||||
| HK332000007 | Atmel Atmega Socket Firmware Flashing Tool (27195) [332000007] | Адаптер USB-программатора для прошивки чипов Atmega непосредственно на плате регулятора и т.п.This genius tool makes flashing the Atmel Atmega MCU found in many ESCs or other devices using Atmega processors a walk in the park. No need to solder or create cumbersome clip on devices, simply connect the socket flashing tool to a USBasp AVR device and place the socket over the exposed Atmel MCU!Unique and exclusive to Hobbyking this handy device will become a favorite in your DIY arsenal. Features: High point precision. Wide range of applications. Quick and easy, no soldering required. 
Specifications: Requires: Suits the Following MCU: | комплект | 1466,50 | ||||||||||||||||||||||||||||||
| AttoPilot-CVS-90A | AttoPilot Voltage Current Sensor Module 90A APM Flight Controller APM2.5 APM2.52 [AttoPilot-CVS-90A] | Датчик тока и напряжения AttoPilot 90A для APM, Pixhawk, с коннекторами XT60 и 6-контактным 250мм кабелемМодуль не является устройством питания для вашего APM и дополнительной периферии, а только средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM2.5.2, APM2.6, Pixhawk при помощи 6-контактного кабеля.Может подключаться к источнику питания до 18В (5S LiPo) и 90А. Модуль имеет коннекторы XT60. В комплект входит: Коннектор DF13 6-контактный длиной 250мм Датчик тока/напряжения APM Коннекторы XT60 (1 пара) 2 отрезка провода 16AWG 2 отрезка термоусадочной трубки | комплект | 376,26 | ||||||||||||||||||||||||||||||
| BN-180 | Beitian BN-180 GPS GLONASS Module With Cable [SKU777228] | Модуль GPS Beitian BN-180 для полетных контроллеров и пр.Description:Dimension : 18mm*18mm*6mm Weight : 4.9g Connector : 1.00mm spacing between the 4pins patch seat 
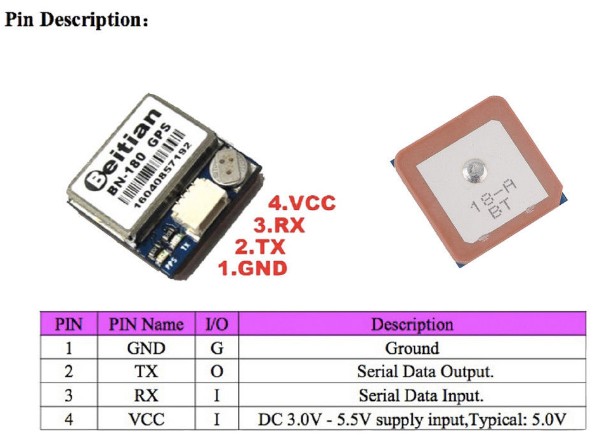 Specification Electrical Characteristics Chipset : M8030-KT Receiving Format : GPS,GLONASS,Galileo,BeiDou,QZSS and SBAS Frequency : GPS L1,GLONASS L1,BeiDou B1,SBAS L1,Galileo E1 Channels : 72 Searching Channel Sensitivity Tracking : -167dBm Reacquisition : -160dBm Cold start : -148dBm Hot start : -156dBm Accuracy Position Horizontal : 2.0 m CEP 2D RMS SBAS Enable (Typical Open Sky) Velocity : 0.1m/sec 95% (SA off) Timing : 1us synchronized to GPS time Acquisition Time Cold Start : 26s Warm start : 25s Hot start : 1s Data and Update Rate Support Rate : 4800bps to 921600bps,Default 9600bps Data Level : TTL or RS-232,Default TTL level Data Protocol : NMEA-0183 or UBX, Default NMEA-0183 Single GNSS : 1Hz-18Hz Concurrent GNSS : 1Hz-10Hz,Default 1Hz Operational Limits Altitude : 50,000m Max Velocity : 515m/s Max Acceleration : Less than 4g Power consumption VCC : DC Voltage 3.0V-5.5V,Typical: 5.0V Current : Capture 50mA/5.0V Operating temp : -40 °C ~ +85°C Storage Temp : -40°C ~ +105°C Indicator : TX LED:blue.The data output, TX LED flashing PPS LED:red.PPS LED not bright when GPS not fixed,flashing when fixed Wiring: GND,TX output,RX input,VCC(3.0v-5.5v) Package Included 1 x BN-180 GPS Module 2 x 15cm Cable GPSmodule | комплект | 565,65 | ||||||||||||||||||||||||||||||
| BN-220 | Beitian BN-220 GPS GLONASS Module With Cable [SKU777244] | Модуль GPS Beitian BN-220 для полетных контроллеров и пр.Description:Dimension : 22mm*20mm*6mm Weight : 5.3g Connector : 1.00mm spacing between the 4pins patch seat 
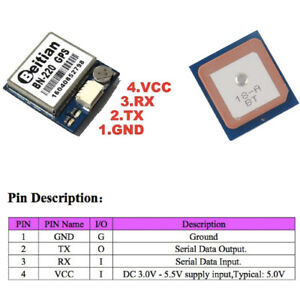 Specification Electrical Characteristics Chipset : 8030-KT Receiving Format : GPS,GLONASS,Galileo,BeiDou,QZSS and SBAS Frequency : GPS L1,GLONASS L1,BeiDou B1,SBAS L1,Galileo E1 Channels : 72 Searching Channel Sensitivity Tracking : -167dBm Reacquisition : -160dBm Cold start : -148dBm Hot start : -156dBm Accuracy Position Horizontal : 2.0 m CEP 2D RMS SBAS Enable (Typical Open Sky) Velocity : 0.1m/sec 95% (SA off) Timing : 1us synchronized to GPS time Acquisition Time Cold Start : 26s Warm start : 25s Hot start : 1s Data and Update Rate Support Rate : 4800bps to 921600bps,Default 9600bps Data Level : TTL or RS-232,Default TTL level Data Protocol : NMEA-0183 or UBX, Default NMEA-0183 Single GNSS : 1Hz-18Hz Concurrent GNSS : 1Hz-10Hz,Default 1Hz Operational Limits Altitude : 50,000m Max Velocity : 515m/s Max Acceleration : Less than 4g Power consumption VCC : DC Voltage 3.0V-5.5V,Typical: 5.0V Current : Capture 50mA/5.0V Operating temp : -40 °C ~ +85°C Storage Temp : -40°C ~ +105°C Indicator : TX LED:blue.The data output, TX LED flashing PPS LED:red.PPS LED not bright when GPS not fixed,flashing when fixed Wiring: GND,TX output,RX input,VCC(3.0v-5.5v) Package Included 1 x BN-220 GPS Module 2 x 15cm Cable GPSmodule | комплект | 565,65 | ||||||||||||||||||||||||||||||
| SKU206532 | Beitian BN-880 GPS/Compass Module With Cable [SKU206532/971082] | Модуль GPS+компас Beitian BN-880 для полетных контроллеров APMDescription:Model: BN-880 Power Supply: DC Voltage 2.8V~6.0V,Typical:3.3V or 5.0V Consumption: Capture 50mA@5V Receiving Format: GPS,GLONASS,Galileo,BeiDou,QZSS and SBAS Receiving Channel: 72 Searching Channel Receiving Sensitivity: Trace -167dBm Capture-148dBm Positioning Time:Cold Start: avg 26s Warm Start: avg 25s Hot Start: avg 3s Level Positioning Precison: 2m At Open Wind Output Frequency: 1Hz-10Hz, Default 1Hz Speed Precison: 0.1 m/s (Without Aid) Acceleration Precison: 0.1 m/s (Without Aid) Dynamic Characteristics: Max Height:18000m Max Speed: 5153m/s Max Acceleration: 4G UART Interface: UART Port: TXDA and RXDA Support Rate: 4800bps to 115200bps,Default 38400dps Working Temperature: -40℃-+85℃ Storage Temperature: -40℃-+85℃ Size: 28mm x 28mm x 10mm Weight: 10g The Module’s Pins: SDA,GND,TX,RX,VCC,SCL Features: GPS Module,Dual Module Compass With electronic compass IC HMC5883L 1.25mm spacing between the 6pins patch seat Note:Can not use for flight control with SCM,but it is suitable for Open source flight controller. Pcakage Included: 1x BN-880 GPS Module 1x 15cm Cable GPSmodule | комплект | 1130,67 | ||||||||||||||||||||||||||||||
| BN-880Q | Beitian BN-880Q GPS/Compass Module With Cable [1450469] | Модуль GPS+компас Beitian BN-880Q для полетных контроллеров APMВ сравнении с BN-880, этот модуль выполнен на одной платеDescription: Chip features: Chip M8030-KT Frequency LPS L1, GLONASS L1, BEIDOU B1,GALILEO E1, SBAS L1, QZSS L1 Working mode GPS, GLONASS, BEIDOU, GALILEO, SBAS and QZSS. Default GPS+GLAONASS+SBAS+QZSS Channel 72 searching channel Sensitivity: Track -167dBm Recapture -160dBm Cold start -148dBm Hot start -156dBm Precision: Horizontal accuracy 2.0 m CEP 2D RMS SBAS assist (open space) Speed accuracy 0.1m/s 95%(SA off) Time accuracy 1us Startup time: Cold start 26s Warm start 25s Hot start 1s Output data: Baud rate 4800bps-921600bps, default 9600bps Output level TTL Output protocol NMEA-0183 or UBX, default NMEA-0183 protocol NMEA sentences RMC, VTG, GGA, GSA, GSV, GLL Update frequency 1Hz-10Hz, default 1Hz FLASH 4M FLASH, The configuration can be changed and will not be lost after power off Working limit: Height 50,000m max Speed 515m/s max Gravity acceleration 4g max Power consumption: Voltage DC 3.0V-5.5V, typical: 5.0V Current Normal 50mA@5.0V Physical parameter: Size 28mm*28mm*8mm Weight 12g Connector 1.25 pitch 6pin carrier Environment: Operate temperature -40℃~+85℃ Storage temperature -40℃~-+105℃ Indicator light: TX light Blue light flashing when power-on, indicated that there is data output PPS light The light is not lit when it is not positioned; after 3D positioning, it starts to blink. Compass Compass With internal electronic compass QMC5883 BN-880Q GPS integrated module Pins of the module: D. SDA. G. GND, ground. T. TX, the data output of the module. R. RX, the data input of the module. V. VCC, 3.0V--5.5V. C. SCL. Pcakage Included: 1x BN-880Q GPS Module 1x 15cm Cable GPSmodule | комплект | 879,27 | ||||||||||||||||||||||||||||||
| F4-NOXE-Acro | Betaflight F4 Noxe Acro 20x20mm Flight Controller AIO OSD BEC w/ LC Filter for RC Drone | Полетный контроллер Betaflight F4 Noxe Acro 20x20mm для квадрокоптеровSpecification:Item Name: Betaflight F4 Flight Controller Model: F4 Noxe Version: Acro Version Acro Version: No Barometer and Blackbox CPU: STM32F411C MPU: MPU6000 Input Voltage: Support 2-4S Lipo Input Firmware: betaflight_3.3.0_NOX Built-In Betaflight OSD Built-in 5V @ 3A BEC Built-in LC Filter, support DShot, Proshot ESC Support Spektrum 1024 /2048 , SBUS, IBUS, PPM, and 3.3V Spektrum Satellite receiver Size: 27x27mm Mounting Hole: 20x20mm , M2.5 Weight: 3.3g Application: for less than 150mm frame kit Receiver Setting: 1. DSM / IBUS/SBUS Receiver, choose UART RX2 2. PPM Receiver, don't need choose UART Port Package Included: 1x F4 Noxe Flight Controller 1x Cable 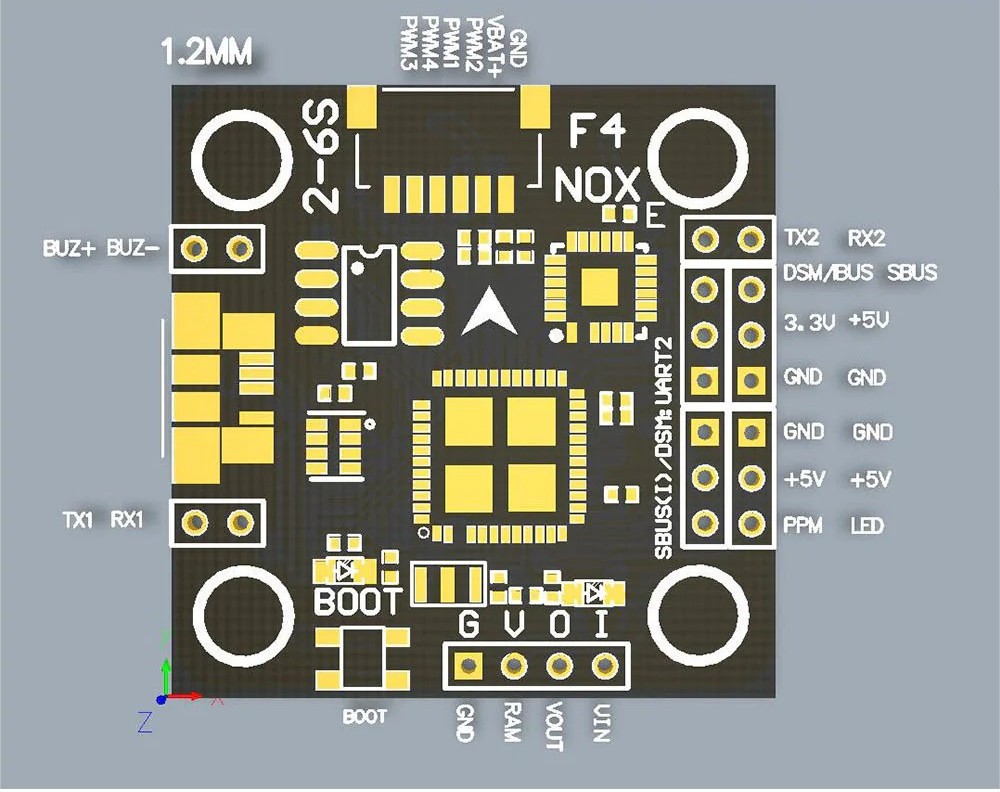  | шт. | 816,42 | ||||||||||||||||||||||||||||||
| F4-NOXE-Deluxe | Betaflight F4 Noxe Deluxe 20x20mm Flight Controller AIO OSD BEC w/ LC Filter Barometer and Blackbox | Полетный контроллер Betaflight F4 Noxe Deluxe 20x20mm для квадрокоптеровSpecification:Item Name: Betaflight F4 Flight Controller Model: F4 Noxe Version: Deluxe Version Deluxe Version: With Barometer and Blackbox CPU: STM32F411C MPU: MPU6000 Input Voltage: Support 2-4S Lipo Input Firmware: betaflight_3.3.0_NOX Built-In Betaflight OSD Built-in 5V @ 3A BEC Built-in LC Filter, support DShot, Proshot ESC Support Spektrum 1024 /2048 , SBUS, IBUS, PPM, and 3.3V Spektrum Satellite receiver Size: 27x27mm Mounting Hole: 20x20mm , M2.5 Weight: 3.3g Application: for less than 150mm frame kit Receiver Setting: 1. DSM / IBUS/SBUS Receiver, choose UART RX2 2. PPM Receiver, don't need choose UART Port Package Included: 1x F4 Noxe Flight Controller 1x Cable | шт. | 1004,97 | ||||||||||||||||||||||||||||||
| CC3D-bp | CC3D Openpilot MPU6500 32-bit Flight Controller for Multicopter (bent pin) [CC3D-bp] | Полетный контроллер CC3D Openpilot MPU6500 32-bit (горизонтальные выходы) на плате 36x36мм для мини-коптераSpecification:Powerful STM32 32-bit microcontroller running at 90MIPs with 128KB Flash and 20KB RAM 3-axis high-performance MEMs gyros and 3-axis high-performance MEMs accelerometer Tiny 36mmx36mm 4 layer PCB for superior electrical noise reduction and flight performance. Software support for Windows, Mac and Linux Direct high speed USB support with no drivers required, a truly plug and play device. Spektrum satellite receiver support Futaba S-BUS hardware support Innovative Flexi-port technology for superior port flexibility 4Mbits on-board EEPROM for configuration storage Flexiport CopterControl also offers the innovative Flexi-port which provides either I2C connectivity or a second serial port. Flexi-port gives CopterControl the flexibility to use either I2C and a single serial port or dual serial ports, according to your connectivity needs. Superior user experience OpenPilot has tried to make your experience with the CC3D as easy and trouble-free as possible. Naturally for a high-end product, the hardware is complete; there is nothing to solder. The included RC harness allows you to connect any standard PWM receiver. All CopterControl boards are tested before shipping and come with bootloader already flashed. A standard mini-USB cable (not included) is used to load the latest firmware and configure everything for your unique airframe. The OpenPilot project, whist still young, it trying to make Open Source much more user friendly. OpenPilot software is designed to be used by everybody! All major operating systems are supported and install packages are provided. The software is all Free software under the GPLv3 license and not only are you welcome to hack it, but we encourage it! Sensors and Components 3-axis Gyroscope array and 3-axis Accelerometer: MPU-6000 Supports several common RC inputs: 6 PWM channels, combined PPM, Spektrum/JR DSM2, DSMJ, and Futaba S.Bus receivers Simultaneous support for multiple receivers ReceiverPort functions (configurable): 6 PWM input channels or combined PPM stream, 4 PWM output channels MainPort functions (configurable): serial telemetry (default), GPS, S.Bus, Spektrum/JR satellites FlexiPort (configurable): serial telemetry, GPS, Spektrum/JR satellites, or I2C peripherals (under development) 10 PWM outputs to servos or ESC’s, or for camera stabilization Camera stabilization: supports up to 3-axis camera mounts with stabilization and manual control from any of configured receivers Onboard USB connectivity for easy configuration USB and serial telemetry and configuration (including wireless with optional radio modules) Supported by powerful OpenPilot GCS 4 Mbit onboard memory 3C Quaternion based complementary filter running at 500Hz | комплект | 826,27 | ||||||||||||||||||||||||||||||
| CC3D-sp | CC3D Openpilot MPU6500 32-bit Flight Controller for Multicopter (straight pin) [CC3D-sp] | Полетный контроллер CC3D Openpilot MPU6500 32-bit (вертикальные выходы) на плате 36x36мм для мини-коптераSpecification:Powerful STM32 32-bit microcontroller running at 90MIPs with 128KB Flash and 20KB RAM 3-axis high-performance MEMs gyros and 3-axis high-performance MEMs accelerometer Tiny 36mmx36mm 4 layer PCB for superior electrical noise reduction and flight performance. Software support for Windows, Mac and Linux Direct high speed USB support with no drivers required, a truly plug and play device. Spektrum satellite receiver support Futaba S-BUS hardware support Innovative Flexi-port technology for superior port flexibility 4Mbits on-board EEPROM for configuration storage Flexiport CopterControl also offers the innovative Flexi-port which provides either I2C connectivity or a second serial port. Flexi-port gives CopterControl the flexibility to use either I2C and a single serial port or dual serial ports, according to your connectivity needs. Superior user experience OpenPilot has tried to make your experience with the CC3D as easy and trouble-free as possible. Naturally for a high-end product, the hardware is complete; there is nothing to solder. The included RC harness allows you to connect any standard PWM receiver. All CopterControl boards are tested before shipping and come with bootloader already flashed. A standard mini-USB cable (not included) is used to load the latest firmware and configure everything for your unique airframe. The OpenPilot project, whist still young, it trying to make Open Source much more user friendly. OpenPilot software is designed to be used by everybody! All major operating systems are supported and install packages are provided. The software is all Free software under the GPLv3 license and not only are you welcome to hack it, but we encourage it! Sensors and Components 3-axis Gyroscope array and 3-axis Accelerometer: MPU-6000 Supports several common RC inputs: 6 PWM channels, combined PPM, Spektrum/JR DSM2, DSMJ, and Futaba S.Bus receivers Simultaneous support for multiple receivers ReceiverPort functions (configurable): 6 PWM input channels or combined PPM stream, 4 PWM output channels MainPort functions (configurable): serial telemetry (default), GPS, S.Bus, Spektrum/JR satellites FlexiPort (configurable): serial telemetry, GPS, Spektrum/JR satellites, or I2C peripherals (under development) 10 PWM outputs to servos or ESC’s, or for camera stabilization Camera stabilization: supports up to 3-axis camera mounts with stabilization and manual control from any of configured receivers Onboard USB connectivity for easy configuration USB and serial telemetry and configuration (including wireless with optional radio modules) Supported by powerful OpenPilot GCS 4 Mbit onboard memory 3C Quaternion based complementary filter running at 500Hz | комплект | 826,27 | ||||||||||||||||||||||||||||||
| CC3D-Mount | CC3D-Mount CC3D, NAZE32, MiniAPM, Glass Fiber Shock Absorber Anti-vibration Set | Площадка амортизирующая антивибрационная текстолитовая для полетных контроллеров CC3D, NAZE32, MiniAPM и пр.Характеристики:— Материал: стеклотекстолит — Размеры: 63 * 63 * 10мм — Масса: 13,5г — Цвет черный  2 * текстолитовые пластины 4 * силиконовые демпферы 4 * резиновые направляющие 1 * самоклейка 3M | комплект | 167,60 | ||||||||||||||||||||||||||||||
| CPD4SENUNIT | CPD4SENUNIT Fma Direct sensor unit | Пирометрический сенсор авиагоризонта для телеметрических систем-автопилотов, таких как Fma Direct, Dragon OSD…. | шт | 2009,52 | ||||||||||||||||||||||||||||||
| I2C-GPS_NAV_ModuleV1-1 | CRIUS MultiWii I2C-GPS Navigation Board V1.1 for MWC 328P [I2C-GPS_NAV_ModuleV1-1] | Адаптер I2C-GPS (V1.1) для полетных контроллеров MultiWiiПозволяет подключать GPS модуль к платам MultiWii 328PFeatures: 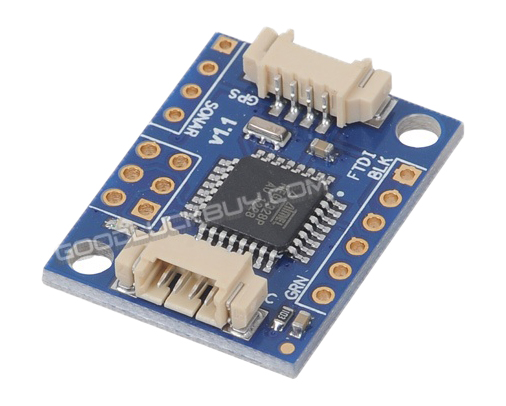
Other Package Included: | комплект | 628,50 | ||||||||||||||||||||||||||||||
| CUAV-NEO-V2-GPS | CUAV NEO V2 GPS GNSS Module for V5+/X7 Pro/Nora (JST-GH 10pin) | Модуль GPS/Compass CUAV NEO V2 GPS для полетных контроллеров Pixhack V5+/X7 Pro/Nora (JST-GH 10pin)Перепиновав коннектор, можно применять с Pixhawk CUBE и пр.Specs. GPS Location UBLOX M8N RGB Status light NCP5623C Compass IST8310 Buzzer Passive buzzer Buzzer Physical buttons Positioning Performance Accuracy 3D Fix Update rate 10Hz(Max) Acquisition Cold Start 26S | Host Start 1.5S | Aided Start 2S | Reacquisition 1S Receiver type 72 Channels GPS/QZSS L1 C/A, GLONASS L10F BeiDou B1I, Galileo E1B/C SBAS L1 C/A: WAAS, EGNOS, MSAS, GAGAN Sensitivity Tracking & Navigation -167dBm | Cold Start -148dBm | Hot Start -156dBm | Reacquisition -160dBm Functional 1. Advanced jamming 2. Fast search satellite speed Security and integrity protection 3. Receiving up to three GNSS at the same time Working Conditions Input voltage 5V Temperature -10 - 70°C 
 
 GPSmodule | комплект | 3959,55 | ||||||||||||||||||||||||||||||
| CUAV-PixhackV3x-M8N-set | CUAV Pixhack V3X Flight Controller with M8N GPS, PM Combo Set | Полетный контроллер CUAV Pixhack V3X с модулем M8N GPS/Compass, модулем питанияOptimize the IMU design and integrate all sensors into the imu module for better consistency.Optimize the temperature compensation system to reduce sensor temperature drift. CUAV and the PX4 team work together to optimize, PIXHACK v3 is once again perfectly compatible with PX4 native firmware. Intelligent recognition of the direction of the external compass to solve the troubles of setting up your installation in an abnormal direction. Optimize support for CAN devices. External interface output power upgrade (maximum support 3A/5V), to solve the trouble of high-power radios need independent power supply. More optimizations: Support high precision electronic compass IST8310. Upgrade BootLoader to FMU v3 and run the full version of APM/PX4 firmware perfectly. 
 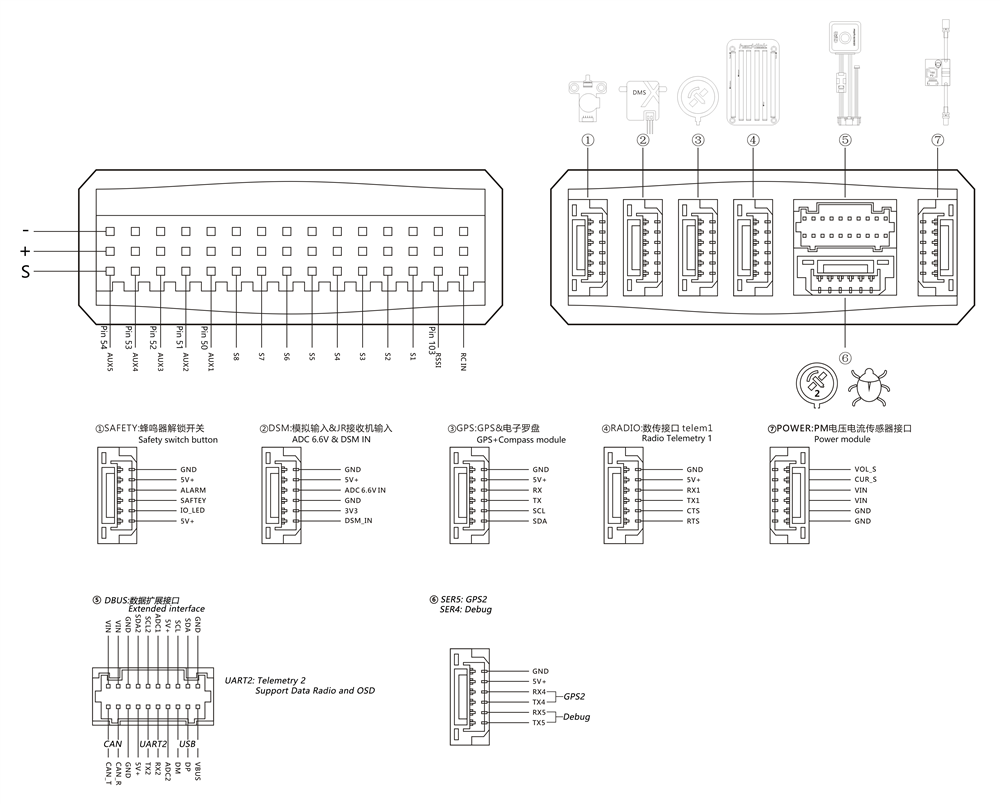 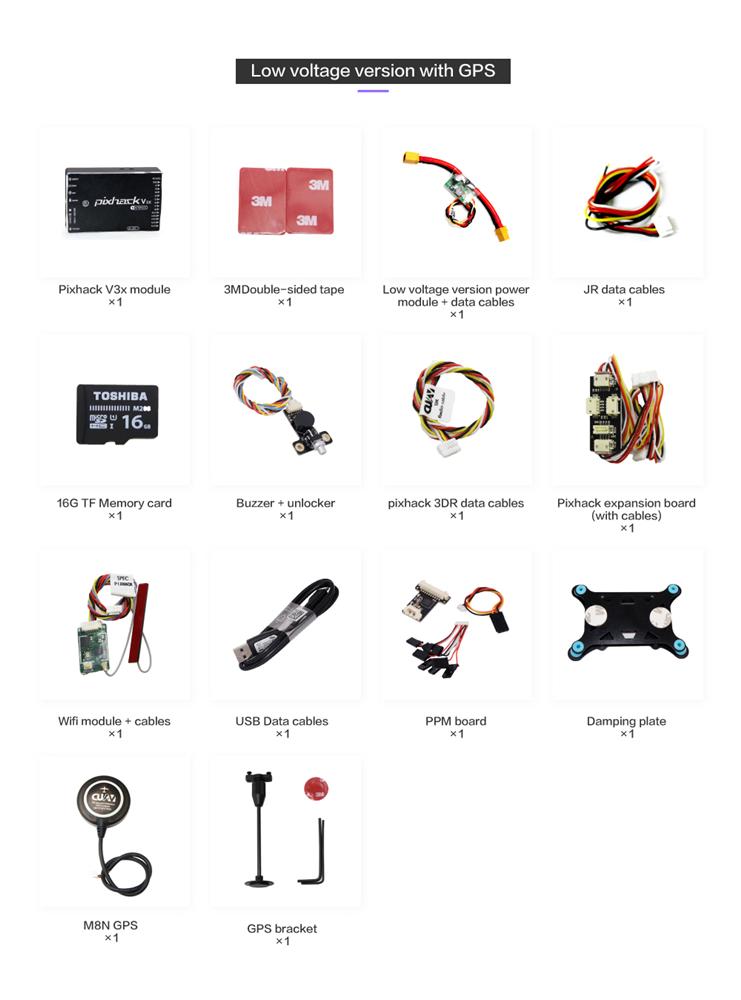 Flight Controller Specifications: - Processor: 2 - Main processor: STM32F427 V3 - Coprocessor: STM32F100 - Support remote control signal: PPM/SBUS/DSM - Power supply redundancy: Support 3 channels redundancy - 6* 3 groups of IMU - Support fixed wing/multirotor 3-8 axis/helicopter/car/boat - Support PX4/APM software Sensors: - L3GD20 3-axis Accelerometer - LS303D Accelerometer+Magnetic meter - MS5611 Barometer x 2 - MPU6000 gyroscope+ Accelerometer - MPU9250 Accelerometer+gyroscope+Magnetic meter Flight Controller Parameter: - Weight: 70g - Shell material: CNC aluminum alloy - Size: 68*44*15 - Working temperature: -10~55 degree C - PWM output IO: 13 - Mavlink seriel port: 2 - Support GPS: 2 - Debug interface: 1 - I2C interface*2 - CAN interface*1 - Support smart battery - HackLink : Support - Built in shock proof GPS: M8N GPS: - Integrated LNA amplifier chip+SAW filter chip - LNA+SAW supports GPS,GLONASS,Galileo,BeiDou - Integrated HMC5983 compass Package list: - 1 x Pixhack V3X Flight Controller - 1 x M8N GPS - 1 x Voltage and current sersor (unwelded) - 1 x 8CH PPM encoder - 1 x WiFi module - 1 x TF card - 1 x Buzzer+expansion board - 1 x Cable - 1 x USB cable - 1 x Shock proof plate | комплект | 14246,00 | ||||||||||||||||||||||||||||||
| 3DRC-PM-V2 | Current Sensor 25V/90A V2 XT60 Plug no BEC, for APM [3DRC-PM-V2] | Датчик тока и напряжения для APM, Pixhawk, с коннекторами XT60 и 6-контактным 130мм кабелем (не оригинал)Модуль не является устройством питания для вашего APM и дополнительной периферии, а только средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM2.5.2, APM2.6, Pixhawk при помощи 6-контактного кабеля.Может подключаться к источнику питания до 22,2В (6S LiPo) и 90А. Модуль имеет коннекторы XT60. В комплект входит: Коннектор DF13 6-контактный длиной 130мм Модуль питания APM с коннекторами XT60 | комплект | 577,29 | ||||||||||||||||||||||||||||||
| GLB-102339 | Current Sensor 25V/90A XT60 Plug no BEC, for APM 2.5.2 APM2.6 ARDUPILOT [GLB-102339] | Датчик тока для APM, Pixhawk, с коннекторами XT60 и 6-контактным 250мм кабелем (без питания контроллера!)Датчик тока является средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM при помощи 6-контактного кабеля.Может подключаться к источнику питания до 25В (6S LiPo) и 90А. Модуль имеет коннекторы XT60. 
 Характеристики: Макс. входное напряжение: 25В Макс. ток зондирования: 90А Кабель Molex 6-контактный, подключается напрямую к APM В комплект входит: Коннектор DF13 6-контактный длиной 250мм Датчик тока APM с коннекторами XT60 | комплект | 460,90 | ||||||||||||||||||||||||||||||
| GLB-94021 | Cyclops NOVA OSD System Upgrade Module [GLB-94021] | USB-интерфейс для Cyclops NOVA OSDUpgrade Module for Cyclops NOVA OSD System | комплект | 924,63 | ||||||||||||||||||||||||||||||
| GLB-96637 | Cyclops Storm V1.1 OSD AHRS Based OSD RTL/RTH Auto-Return Stabilization f/ FPV w/Protective Case [GL | Комплект телеметрии с функцией стабилизации, GPS автовозврата на точку взлета и выводом информации на экран Cyclops Storm V1.1 OSD RTL/RTH для FPV моделейОсобенности:— Встроенный барометр. — Максимально компактный размер. — Высокоточный датчик тока (100A) и напряжения (30В). — Обновление прошивок. — Настраиваемый OSD экран. — 10Hz GPS, с батарейкой ,3D Fix led indicator. — PAL/NTSC совместимость Полетные режимы: — ручное управление — ручное управление с автоматическим удержанием высоты — возврат в точку взлета ("возврат домой") - включается вручную либо при потере сигнала с аппаратуры управления Автоматический возврат домой выполняется на запрограммируемой высоте. При достижении "домашней точки" модель начнет кружить над точкой взлета на заданной высоте. OSD отображет: — Скорость | Высота | Расстояние | Курс — Направление на домашнюю точку — GPS сигнал — Напряжение силовой батареи — Напряжение дополнительной батареи — Потребляемый ток — Израсходованная емкость mAh — Углы наклона модели — Вариометр (смена скороподъемности). — Таймер   Комплектация: — Основной блок OSD (с бародатчиком, акселерометрами, гироскопами) - 1шт — Датчик тока 30V, 100А - 1шт — 10HZ GPS - 1шт — Плата с кнопками настройки - 1шт — Соединительные кабели. Дополнительно требуется: | комплект | 9237,49 | ||||||||||||||||||||||||||||||
| DF13-4P-20cm | DF13 4Pin 20cm Cable for APM, Pixhawk [DF13-4P-20cm] | Кабель соединительный DF13 4-контактный 20см для APM, Pixhawk и пр. | комплект | 68,19 | ||||||||||||||||||||||||||||||
| RTS-DF13-4 | DF13 4Pin 20cm Cable for APM, Pixhawk [RTS-DF13-4] | Кабель соединительный DF13 4-контактный 20см для APM, Pixhawk и пр. | шт. | 42,74 | ||||||||||||||||||||||||||||||
| DF13-5P-20cm | DF13 5Pin 20cm Cable for APM, Pixhawk [DF13-5P-20cm] | Кабель соединительный DF13 5-контактный 20см для APM, Pixhawk и пр. | комплект | 68,93 | ||||||||||||||||||||||||||||||
| RTS-DF13-5 | DF13 5Pin 20cm Cable for APM, Pixhawk [RTS-DF13-5] | Кабель соединительный DF13 5-контактный 20см для APM, Pixhawk и пр. | шт. | 49,02 | ||||||||||||||||||||||||||||||
| DF13-6P-20cm | DF13 6Pin 20cm Cable for APM, Pixhawk [DF13-6P-20cm] | Кабель соединительный DF13 6-контактный 20см для APM, Pixhawk и пр. | комплект | 69,66 | ||||||||||||||||||||||||||||||
| RTS-DF13-6 | DF13 6Pin 20cm Cable for APM, Pixhawk [RTS-DF13-6] | Кабель соединительный DF13 6-контактный 20см для APM, Pixhawk и пр. | шт. | 50,57 | ||||||||||||||||||||||||||||||
| MAMBA-F405-mini-MK2 | Diatone MAMBA F405 mini MK2 Flight Controller | Полетный контроллер 20x20мм Diatone MAMBA F405 Mini MK2Характеристики:Firmware Target : FURYF4OSD Полетный контроллер Mamba F405 Mini FC MK2 Питание: 3~4S LIPO (11.1V~16.8V) BEC: 5V 2A MCU: STM32F405 Gyro: MPU6000 FLASH: 16M OSD: AT7456 UART: 3 (UART1:SBUS / UART3 / UART6) Посадочные отверстия: 20×20mm / φ2mm, φ3mm Размеры: 30.5×29.5×7mm Вес: 5g 
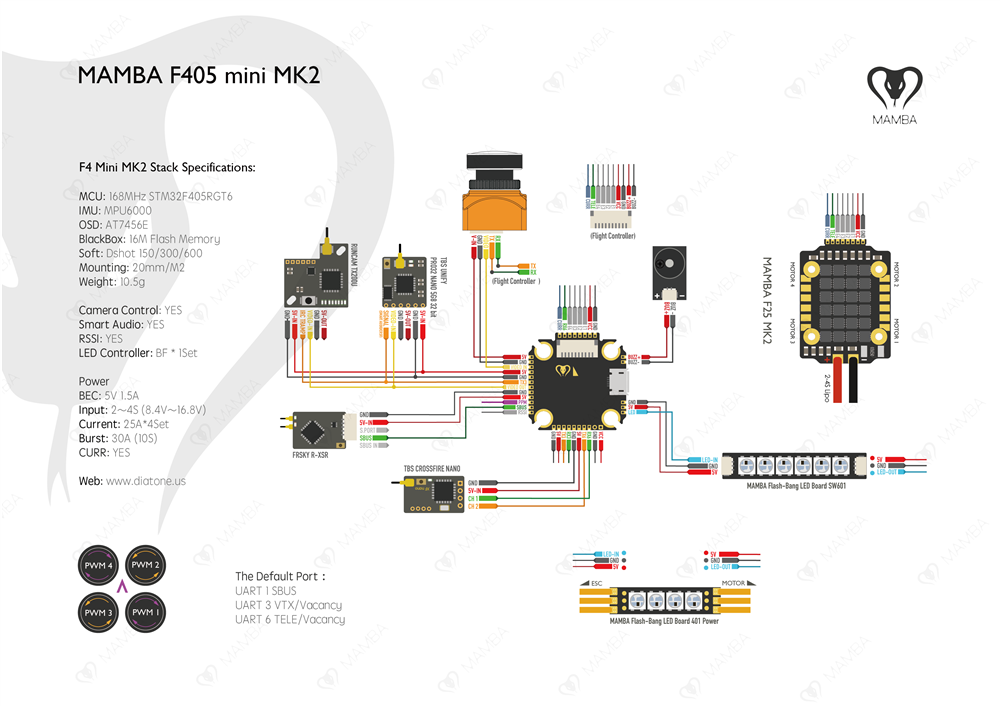 Комплектация: 1 x Mamba F4 MK2 Mini Betaflight Flight Controller ESC-BL-MR | комплект | 1047,50 | ||||||||||||||||||||||||||||||
| BGID1507253 | Diatone MAMBA F405 mini MK2 Stack Flight Controller & F25 25A 3-4S BlHeli_S Brushless ESC for FPV Ra | Стак Diatone Mamba: Полетный контроллер 20x20мм MAMBA F405 Mini MK2 с бесколлекторным регулятором 4-в-1 F25 MK2 25A 3-4S DSHOT600Характеристики:Firmware Target : FURYF4OSD Полетный контроллер Mamba F405 Mini FC MK2 Питание: 3~4S LIPO (11.1V~16.8V) BEC: 5V 2A MCU: STM32F405 Gyro: MPU6000 FLASH: 16M OSD: AT7456 Посадочные отверстия: 20×20mm / φM2 Размеры: 30.5×29.5×7mm Вес: 5g 
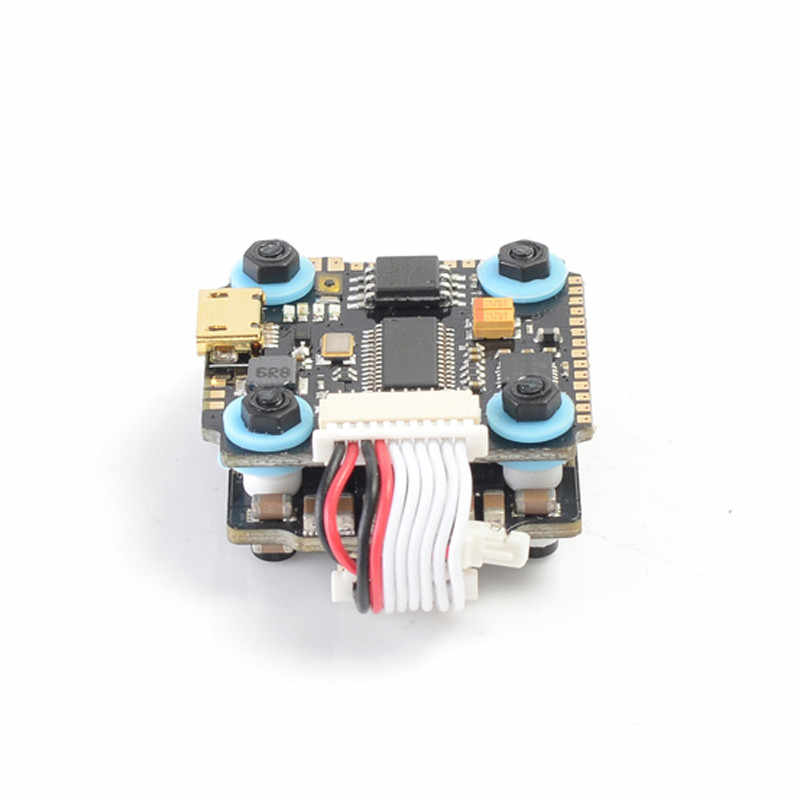 Регулятор 4-в-1 Mamba F25 ESC MK2 Модель: Mamba F25 ESC Входящее напряжение: 3~4S LIPO (11.1V~16.8V) Продолжительный ток: 25A×4 Пиковый ток: 30A (5 сек) Датчик тока: 135A BEC: NO Размеры: 30×30×5mm Посадочные отвестия: 20×20mm / φM2 Масса: 8г Комплектация Diatone Mamba Stack: 1 x Mamba F4 MK2 Mini Betaflight Flight Controller 1 x Mamba F25 ESC конденсатор, XT30, провод 18AWG, ESC-BL-MR | комплект | 2095,00 | ||||||||||||||||||||||||||||||
| MAMBA-F405mMK2-F30m | Diatone MAMBA F405 mini MK2 Stack Flight Controller & F30 mini 30A 3-5S BlHeli_S Brushless ESC for F | Стак Diatone Mamba: Полетный контроллер 20x20мм MAMBA F405 Mini MK2 с бесколлекторным регулятором 4-в-1 F30 MINI 30A 3-5S DSHOT600Характеристики:Firmware Target : FURYF4OSD Полетный контроллер Mamba F405 Mini FC MK2 Питание: 3~4S LIPO (11.1V~16.8V) BEC: 5V 2A MCU: STM32F405 Gyro: MPU6000 FLASH: 16M OSD: AT7456 UART: 3 (UART1:SBUS / UART3 / UART6) Посадочные отверстия: 20×20mm / φ2mm, φ3mm Размеры: 30.5×29.5×7mm Вес: 5g 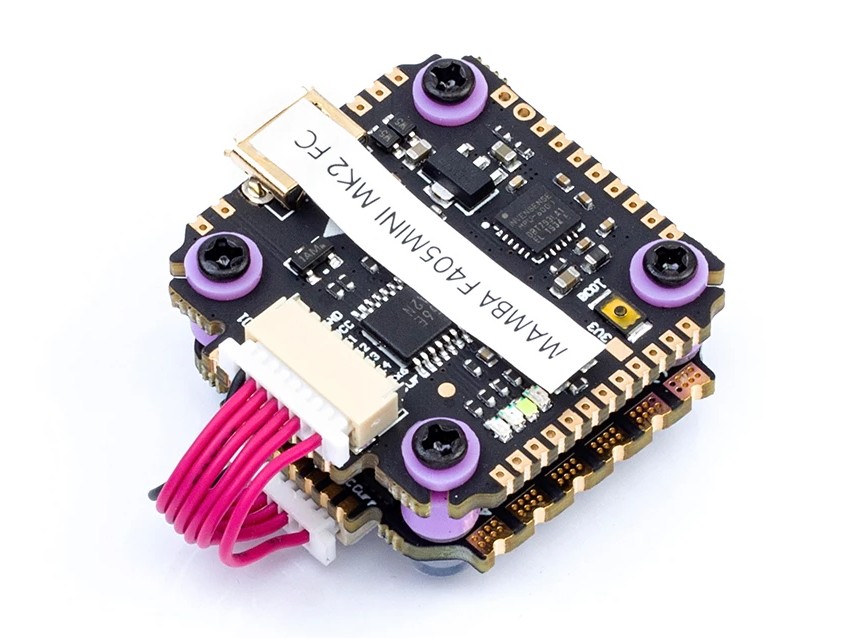
 
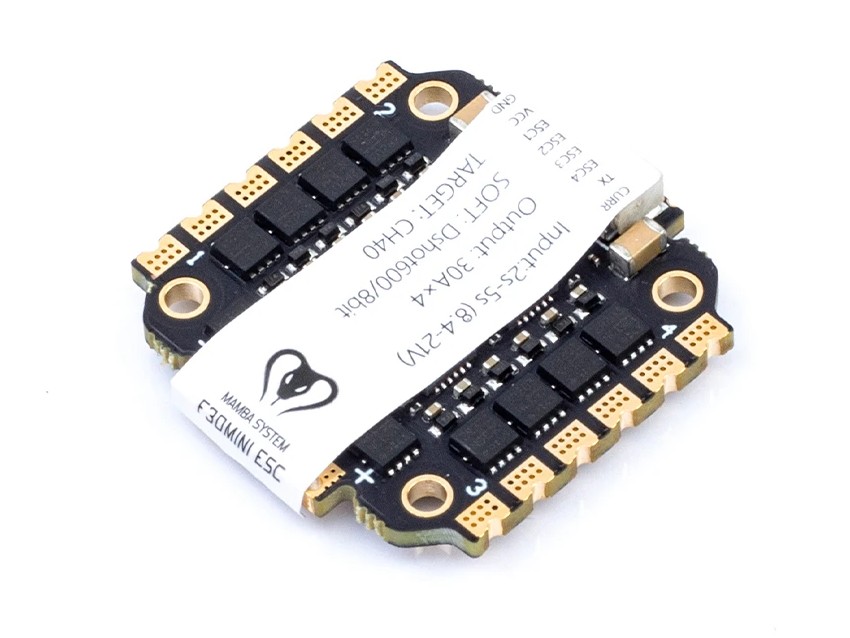 Регулятор 4-в-1 Mamba F30 MINI ESC Модель: Mamba F30 MINI ESC (CH40) Входящее напряжение: 3~5S LIPO (11.1V~21V) Продолжительный ток: 30A×4 Пиковый ток: 40A (10 сек) Датчик тока: 135A BEC: NO Размеры: 29×29×5.5mm Посадочные отвестия: 20×20mm / φ2mm, φ3mm Масса: 6г Комплектация Diatone Mamba Stack: 1 x Mamba F4 MK2 Mini Betaflight Flight Controller 1 x Mamba F30 mini ESC конденсатор, провод 18AWG, ESC-BL-MR | комплект | 2095,00 | ||||||||||||||||||||||||||||||
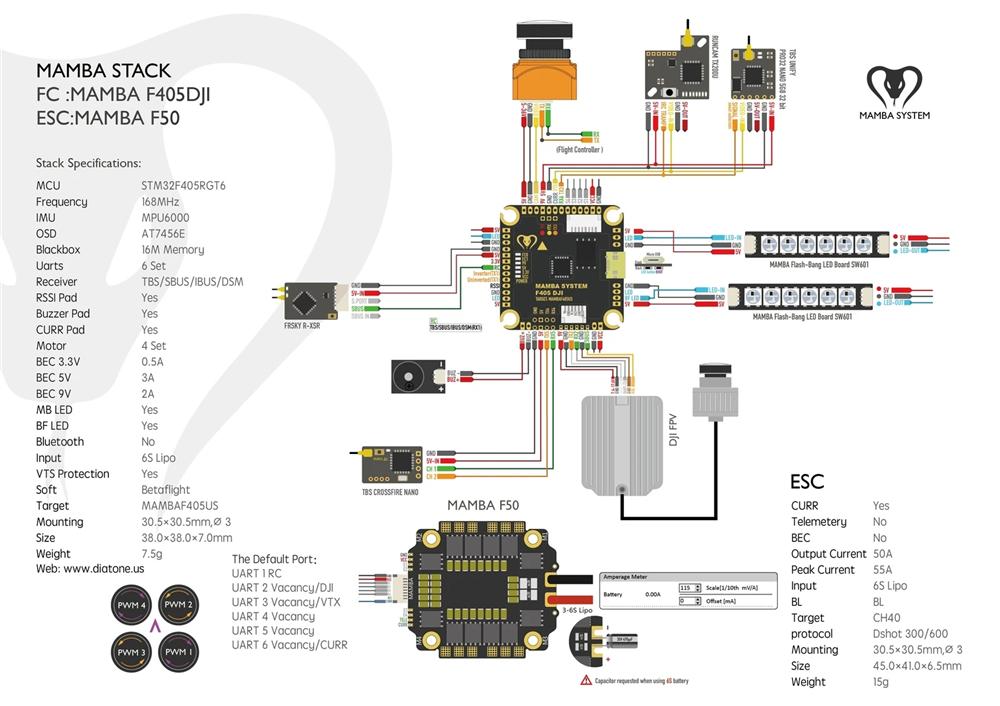
| MAMBA-F405MK2 | Diatone MAMBA F405 MK2 Flight Controller | Полетный контроллер 30x30мм Diatone MAMBA F405 MK2Характеристики:Firmware Target: FURYF4OSD Полетный контроллер Mamba F405 MK2 FC Питание: 12.6-25V (3-6S) BEC: 5V 2.5A & 9V 2A MCU: 168MHz STM32F405RGT6 32BIT IMU: MPU6000 Baro: No Flash: 16MB UARTs: 3 (1 w/inverter) ESC Telemetry: RX6 OSD: AT7456 WS2812 LED Control: BF LED Control Smartaudio: Yes RSSI: Yes Buzz: Yes Посадочные отверстия: 30.5×30.5mm / φM3 Масса: 7.5g 
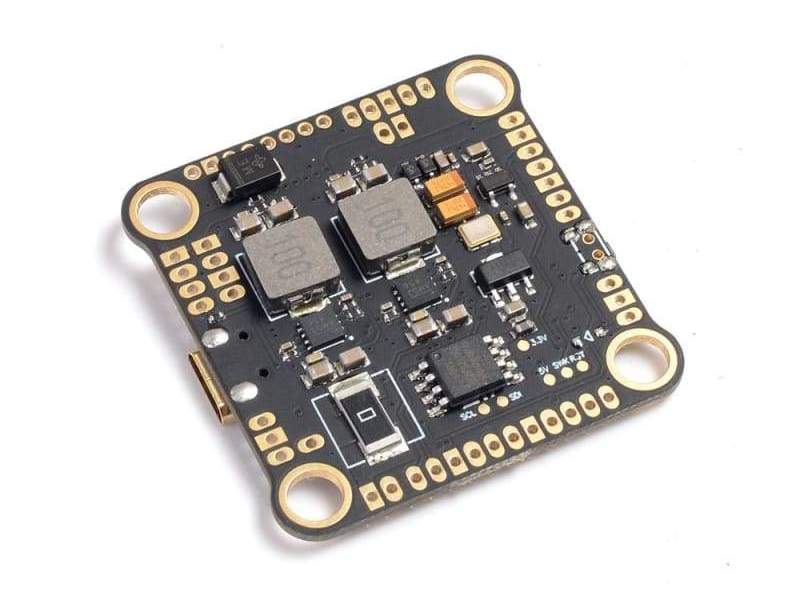 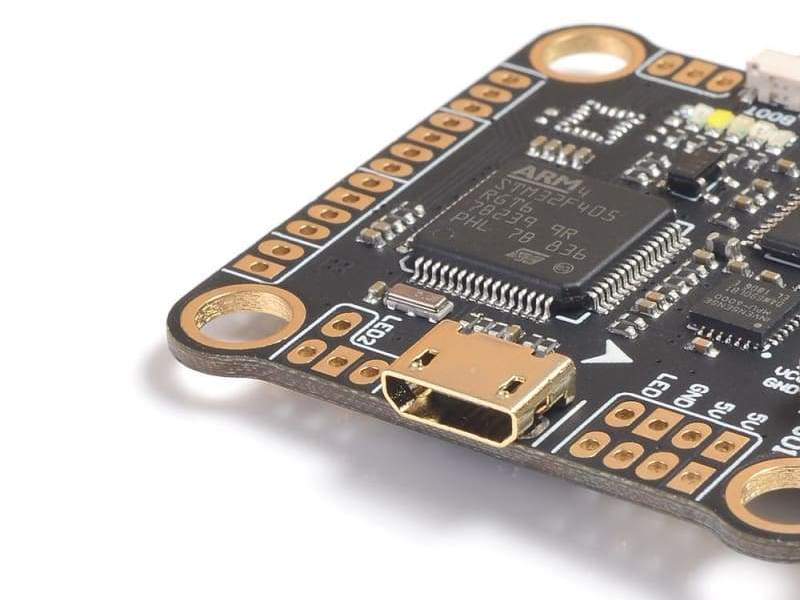
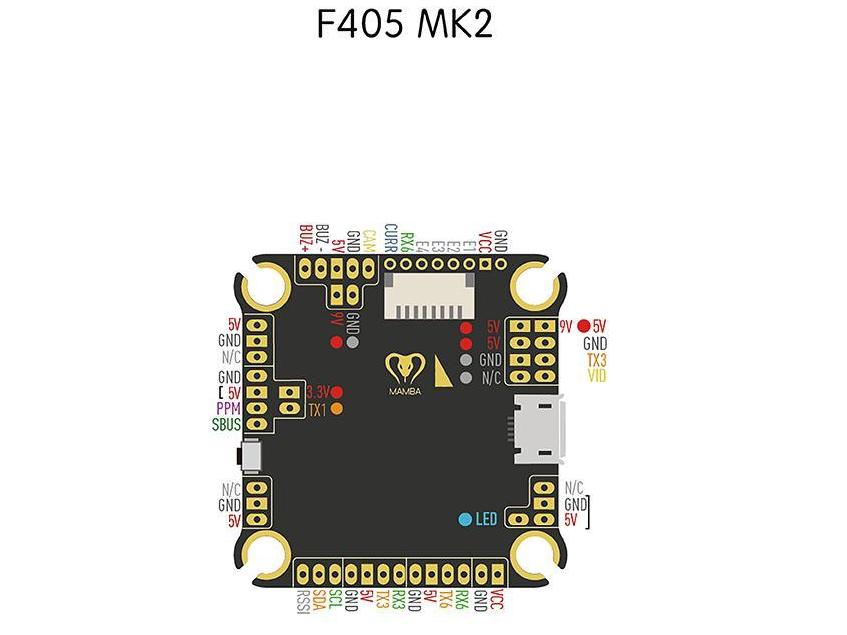  Комплектация: 1 x Mamba F4 MK2 Betaflight Flight Controller | комплект | 1215,10 | ||||||||||||||||||||||||||||||
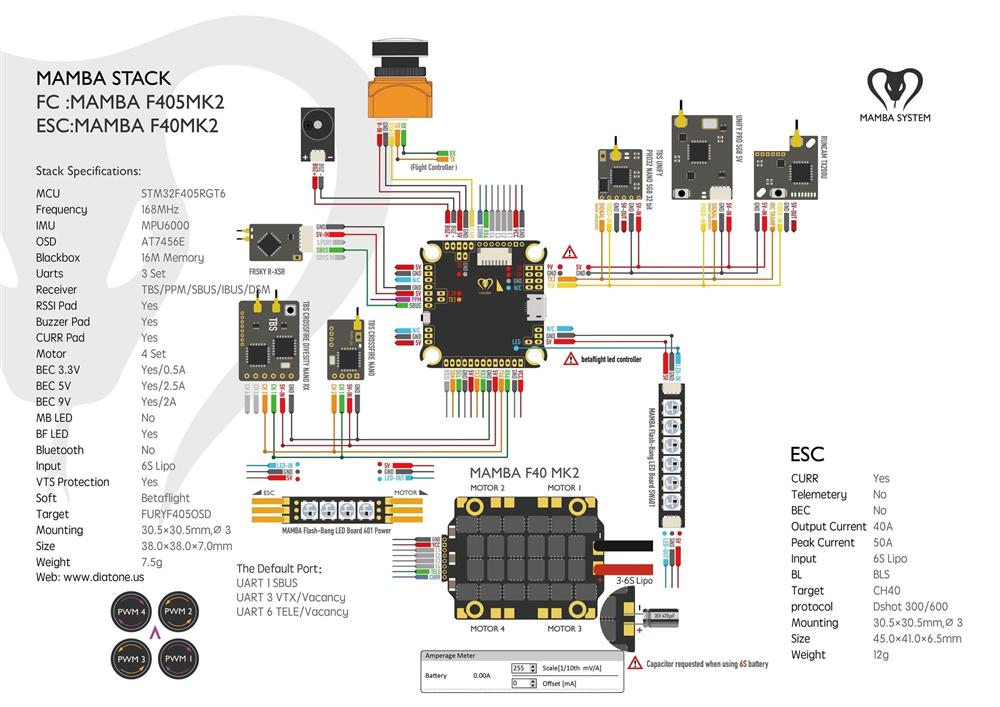
| MAMBA-F405MK2-F40 | Diatone MAMBA F405 MK2 STACK w/ F40 40A 3-6S BlHeli_S Brushless ESC for FPV Racin | Стак Diatone Mamba: Полетный контроллер 30x30мм MAMBA F405 MK2 с бесколлекторным регулятором 4-в-1 F40 40A 3-6S DSHOT600Характеристики:Firmware Target: FURYF4OSD Полетный контроллер Mamba F405 MK2 FC Питание: 12.6-25V (3-6S) BEC: 5V 2.5A & 9V 2A MCU: STM32F405 Gyro: MPU6000 Flash: 16MB OSD: AT7456 Посадочные отверстия: 30.5×30.5mm / φM3 Масса: 6g 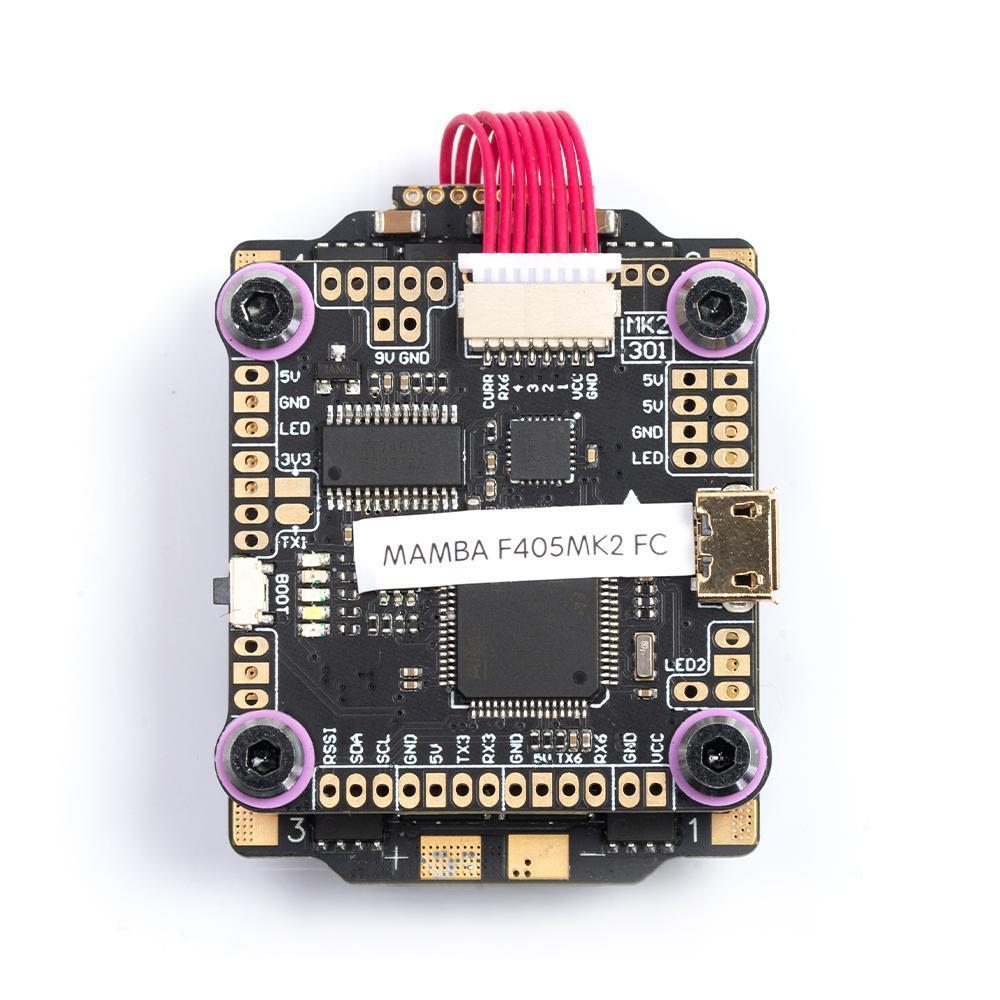
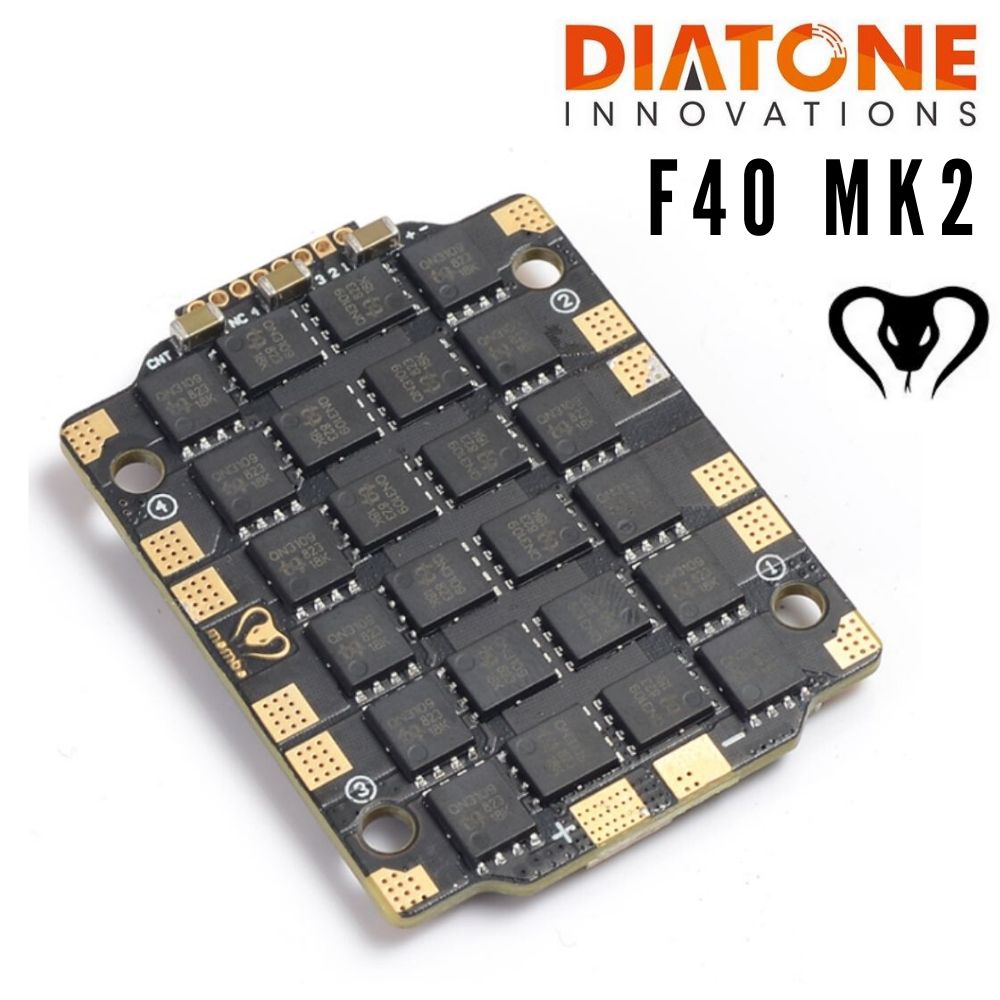 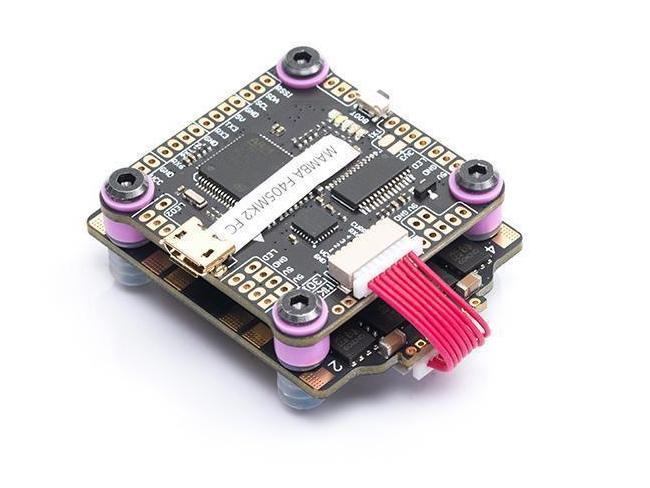
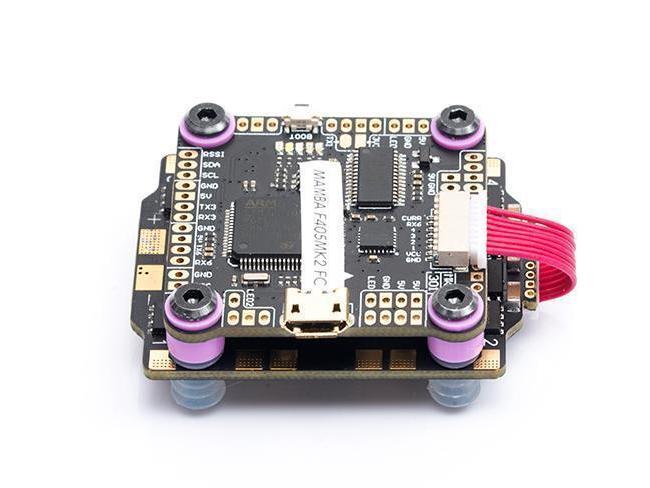 Регулятор 4-в-1 Mamba F40 ESC Модель: Mamba F40 MK2 ESC Входящее напряжение: 3~6S LIPO (11.1V~25V) Продолжительный ток: 40A×4 Пиковый ток: 50A (10 сек) Датчик тока: 169A BEC: NO Посадочные отвестия: 30.5×30.5mm / φM3 Масса: 10г Комплектация Diatone Mamba Stack: 1 x Mamba F4 MK2 Betaflight Flight Controller 1 x Mamba F40 MK2 ESC ESC-BL-MR | комплект | 2488,86 | ||||||||||||||||||||||||||||||
| MAMBA-F405DJI-LITE | Diatone MAMBA F405DJI Lite Flight Controller | Полетный контроллер 30x30мм Diatone MAMBA F405DJI LiteОтлично подходит как для сборок с аналоговым видео (есть BF OSD и вся разводка) так и для цифровых DJI Air Unit, Caddx Vista и пр. (есть BEC 9V для питания юнита)Характеристики: Firmware Target : Mamba F405US Полетный контроллер Mamba F405DJI Lite (нет поддержки 2812 LED) Питание: 3~6S Lipo (12.6~25V) VTS Protection: Yes BEC: 5V 2A & 9V 2A (Max 3A) MCU: 168MHz STM32F405RGT6 32BIT IMU: MPU6000 Baro: No OSD: BF OSD Blackbox: 16M Flash Memory ESC Soft: Dshot300/600/1200 ESC Telemetry: RX6 LED: Blue&Orange for FC Status, Green 9V, White 5V, Red 3.3V UARTS:6 Ports Smart audio: Yes RSSI: Yes Buzz: Yes Посадочные отверстия: 30.5×30.5mm, Φ3mm Масса: 7.5g 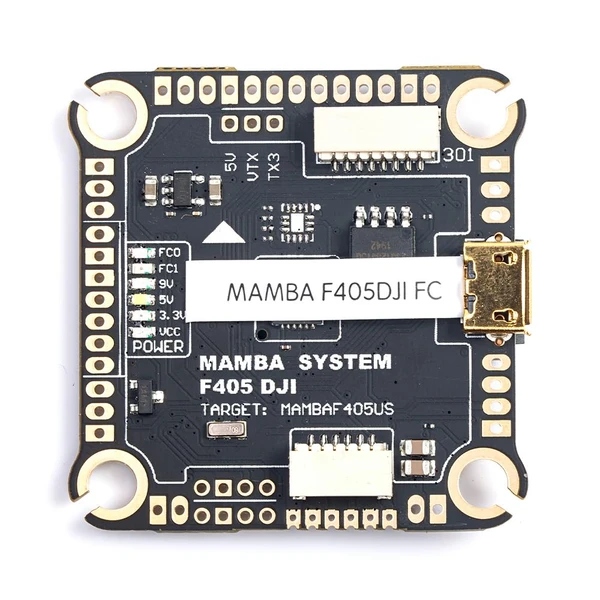
  Комплектация: 1 x Mamba F405DJI (Lite) Betaflight Flight Controller | комплект | 1131,30 | ||||||||||||||||||||||||||||||
| MAMBA-F405US-F35 | Diatone MAMBA F405US mini MK3 Stack Flight Controller & F35 35A 3-6S BlHeli_S Brushless ESC for FPV | Стак Diatone Mamba: Полетный контроллер 20x20мм MAMBA F405US Mini MK3 с бесколлекторным регулятором 4-в-1 F35 35A 3-6S DSHOT600Характеристики:Firmware Target : Mamba F405US Полетный контроллер Mamba F405US Mini FC MK3 Питание: 3~6S LIPO (11.1V~25V) BEC: 5V 2A MCU: STM32F405 Gyro: MPU6000 FLASH: 16M OSD: AT7456 UARTS: 6 Ports Посадочные отверстия: 20×20mm / φM2 Масса: 4g 
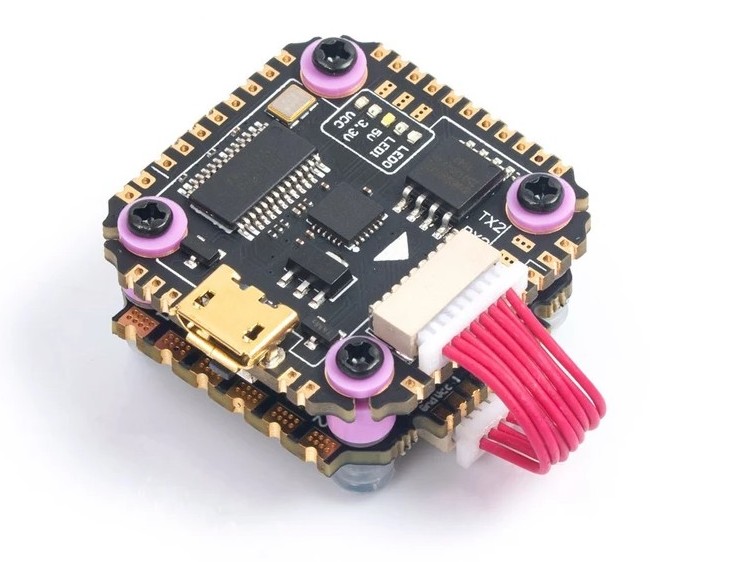 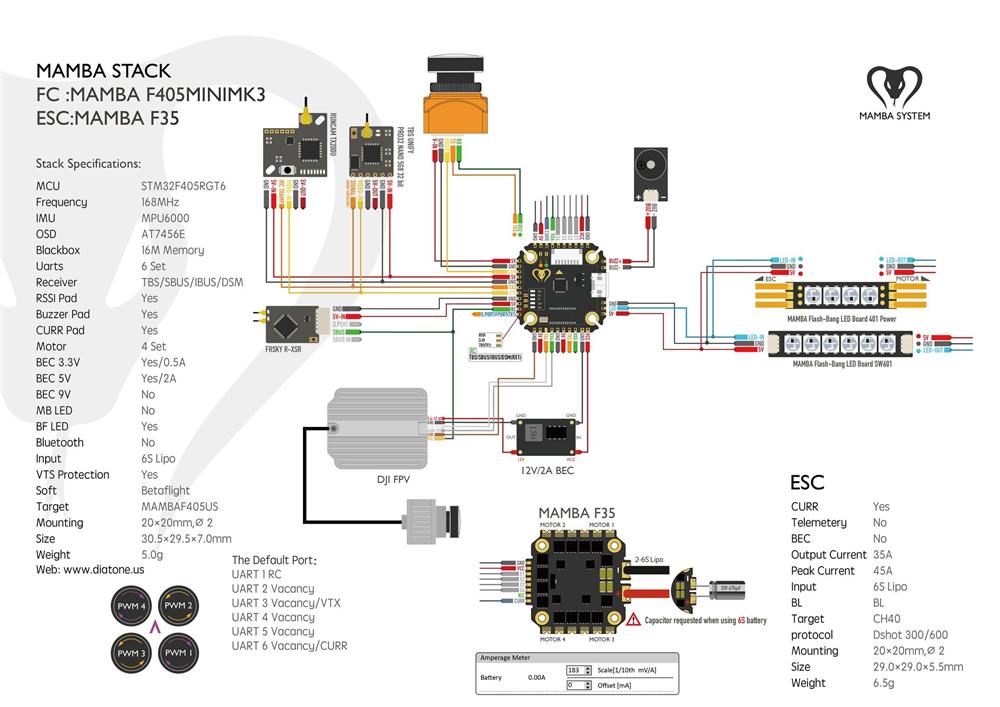 Регулятор 4-в-1 Mamba F35 ESC Модель: Mamba F35 HV ESC Входящее напряжение: 3~6S LIPO (11.1V~25V) Продолжительный ток: 35A×4 Пиковый ток: 45A (10 сек) Датчик тока: 200A BEC: NO Размеры: 30×30×5mm Посадочные отвестия: 20×20mm / φM2 Масса: 8г Комплектация Diatone Mamba Stack: 1 x Mamba F4 MK3 Mini Betaflight Flight Controller 1 x Mamba F35 HV ESC ESC-BL-MR | комплект | 2754,72 | ||||||||||||||||||||||||||||||
| MAMBA-F722-MINI | Diatone MAMBA F722 mini Flight Controller | Полетный контроллер 20x20мм Diatone MAMBA F722 MiniХарактеристики:Firmware Target : Mamba F722 Полетный контроллер Mamba F722 Mini FC Питание: 2~6S LIPO (8.4V~25V) MCU: 216MHz STM32F722RET6 32BIT IMU: MPU6000 Baro: No OSD: BF OSD Blacbox: 16M Flash Memory UART: 6 ESC Soft: Dshot300/600/1200 ESC Telemetry: RX2 LED: Blue&Orange for FC Status,,White 5V,Red 3.3V WS2812 LED Control: BF LED Control Smartaudio: Yes RSSI: Yes Buzz: Yes Размеры: 30×36.5×13.5mm Посадочные отверстия: 20×20mm / φM2 Масса: 3.9g 
  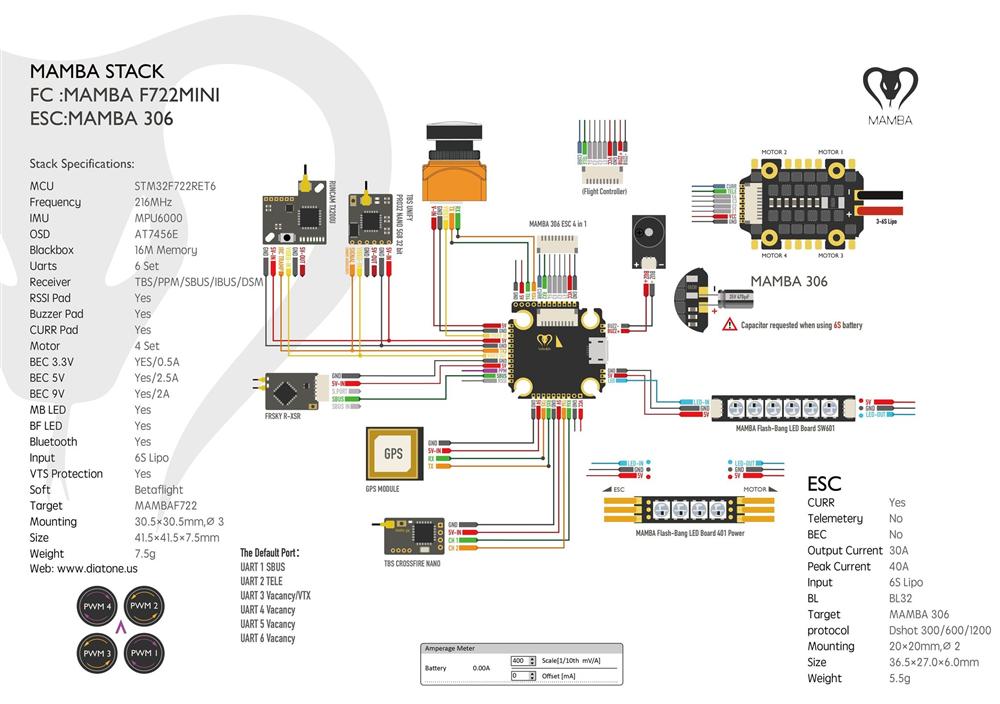 Комплектация: 1 x Mamba F722 Mini Betaflight Flight Controller | комплект | 1851,44 | ||||||||||||||||||||||||||||||
| DJI-A2 | DJI A2 Multi-Rotor Controller | Профессиональный полетный контроллер для мультикоптера DJI A2.Контроллер с системой стабилизации для мультироторных систем A2 Особенности: Модуль компаса GPS-Pro Высокочувствительный IMU с встроенной системой виброгашения Поддержка внешних приемников Поддержка адаптера DJI D-BUS Система двойной CAN-шины Больше выходных интерфейсов Поддержка онлайн-обновлений прошивки 9 типов мультикоптеров и возможность настройки пользовательских схем микширования Гибкая настройка входных каналов Различные полетные режимы с автоматическим переключением Модуль управления питанием Расширенные возможности Fail-Safe и автовозврат/автопосадка Защита при отказе одного двигателя Интеллектуальное управление шасси Интеллектуальный контроль ориентации (IOC) Функция «Объект съемки» (POI) Модуль Bluetooth и новое вспомогательное ПО для смартфонов Станция наземного управления с 50 контрольными точками (ожидается вскоре) Другие полезные функции Поддержка дополнительных устройств   Технические данные: Периферия Полетные характеристики BRAND=DJI | комплект | 54428,10 | ||||||||||||||||||||||||||||||
| DJI-CAN-HUB | DJI CAN-BUS HUB [Z15-1] | Разветвитель шины DJI CAN-BUS для подключения дополнительных устройств (подвес Zenmuse, Data-Link, iOSD и прочее)Блок подключается к CAN шине полетного контролера DJI Phantom2, NAZA-M V2, Wookong, A2Масса 30г 
  BRAND=DJI | комплект | 1173,20 | ||||||||||||||||||||||||||||||
| DJI-LK24-BT-iOSDm-HUB | DJI Combo (iOSD mini + 2.4G Bluetooth Datalink + CAN-Hub) | Комбо набор DJI iOSD mini + 2.4G Bluetooth Datalink + CAN-HubНаземная станция управления DJI 2.4GHz Bluetooth Datalink для полетных контроллеров DJI A2, WKM, NAZA-M V2.DJI 2.4Ghz datalink with Bluetooth + iOS ground station DJI (DJI 2.4GHz Datalink) – инновационная система удаленного управления мультикоптером с iPad или PC (c наземной станции), позволяющая давать команды, задавать маршруты полета в реальном режиме времени.Система включает в себя приложение для управления полетом на базе операционной системы iOS, а также оборудование DJI 2,4 GHz Bluetooth Data-Link. Описание DJI iOS Ground Station & DJI 2,4 GHz Bluetooth Data-Link: Наземная станция DJI 2,4 GHz Bluetooth Data-Link, базирующаяся на системе передачи данных в диапазоне 2,4 ГГц позволяет управлять мультикоптером прямо с Вашего планшета (iPad) с помощью приложения GS (Ground Station). Связь планшета с наземной станцией происходит по Bluetooth каналу. Интерфейс системы интуитивно понятный и очень простой. Управление мультикоптером с iPad происходит по кликам и виртуальным джойстикам. Указывая точки на карте Google Maps на экране планшета, Вы можете задавать маршрут перемещения мультикоптера в режиме онлайн с определенной высотой и скоростью полета. Также можно указать точку возврата, взлетать и садиться по нажатию одной кнопки. Возможна поддержка симуляции полета. При составлении плана полета для каждой точки задается высота полета, горизонтальная и вертикальная скорость, ориентирование коптера относительно сторон света. Возможны 3 типа прохождения каждой точки: с остановкой и ожиданием в точке; проход точки без снижения скорости со сглаживанием угла поворота; проход точки со снижением скорости со сглаживанием угла поворота. Доступны 3 программных шаблона полета с возможностью редактирования: полет по треугольнику, полет по прямоугольнику, полет по кругу и сканирующий полет. Во время полета существует возможность управления устройствами, находящимися на борту, например, включение освещения, спуск фотоаппарата. Управление коптером с компьютера возможно либо с клавиатуры, либо с джойстика. Программное обеспечение, поставляемое в комплекте на CD, позволяет на экране монитора видеть карту Google maps с маршрутом полета и виртуальную панель управления. При потере сигнала с пульта коптер выполнит маршрут и вернется на точку взлета или посадки, если она была указана. Подключение DJI iOS Ground Station не вызовет затруднений. Для начала необходимо соединить антенну с модемом наземной станции, подключить к нему кабель питания, Bluetooth модуль или USB кабель. Модем на борту необходимо подключить к системе управления (PMU для NAZA) через CAN-Bus кабель. Блок iOSD MINI для передачи телеметрической информации на монитор (через видео канал)Блок подключается к CAN шине полетного контролера DJI Phantom2, NAZA-M V2, WKM. На экран монитора выводятся данные о выбранном полетном режиме, напряжении силового аккумулятора, направлении полета, удаление и высоту полета, авиагоризонт, количество спутников GPS, ускорение и наклон мультикоптера по крену и тангажу.Особенности iOSD Mini: Настройка экранного меню на компьютере Обновление программного обеспечения  Технические характеристики iOSD Mini: Питание 6V по CAN BUS Ток потребления 180mA@6V Габариты 33.2x28.2x10.55мм Вес 14 г A/V вход: аналоговый, PAL/NTSC A/V выход: аналоговый, PAL/NTSC Рабочая температура: -20℃~60℃ В комплекте: Блок iOSD mini Кабель для подключения к видео передатчику и камере (сигнал/земля/сигнал/земля) Кабель для подключения к CAN шине полетного контролера Разветвитель шины DJI CAN-BUS для подключения дополнительных устройств (подвес Zenmuse, Data-Link, iOSD и прочее)Блок подключается к CAN шине полетного контролера DJI Phantom2, NAZA-M V2, Wookong, A2Масса 30г
BRAND=DJI | комплект | 7961,00 | ||||||||||||||||||||||||||||||
| DJI_IOSD_MARKII | DJI iOSD mark II | Блок iOSD Mark II для передачи телеметрической информации на монитор (через видео канал)Блок подключается к CAN шине полетного контролера DJI WooKong-M и NAZA-M V2. На экран монитора выводятся данные о выбранном полетном режиме, напряжении силового аккумулятора, направлении полета, удаление и высоту полета, авиагоризонт, количество спутников GPS, ускорение и наклон мультикоптера по крену и тангажу.Особенности iOSD Mark II: Поддержка двух видеовходов (можно переключать камеры по отдельному каналу аппаратуры радиоуправления) Настройка экранного меню на компьютере Обновление программного обеспечения  Технические характеристики iOSD Mark II: Питание LiPo 3S ~ 6S (11,1-22,2В) Ток потребления 60mA@25.2V / 103mA@12.6V, 1.25W Габариты 52×41×11 мм Вес 56 г A/V вход: аналоговый, PAL/NTSC A/V выход: аналоговый, PAL/NTSC Рабочая температура: -20℃~60℃  В комплекте: Блок iOSD Mark II Кабели для подключения к видео передатчику Кабели для подключения к CAN шине полетного контролера  BRAND=DJI | комплект | 9218,00 | ||||||||||||||||||||||||||||||
| DJI_IOSD_MINI | DJI iOSD mini | Блок iOSD MINI для передачи телеметрической информации на монитор (через видео канал)Блок подключается к CAN шине полетного контролера DJI Phantom2, NAZA-M V2, WKM. На экран монитора выводятся данные о выбранном полетном режиме, напряжении силового аккумулятора, направлении полета, удаление и высоту полета, авиагоризонт, количество спутников GPS, ускорение и наклон мультикоптера по крену и тангажу.Особенности iOSD Mini: Настройка экранного меню на компьютере Обновление программного обеспечения Технические характеристики iOSD Mini: Питание 6V по CAN BUS Ток потребления 180mA@6V Габариты 33.2x28.2x10.55мм Вес 14 г A/V вход: аналоговый, PAL/NTSC A/V выход: аналоговый, PAL/NTSC Рабочая температура: -20℃~60℃ В комплекте: Блок iOSD mini Кабель для подключения к видео передатчику и камере (сигнал/земля/сигнал/земля) Кабель для подключения к CAN шине полетного контролера BRAND=DJI | комплект | 2933,00 | ||||||||||||||||||||||||||||||
| DJI-NAZA-GPS | DJI NAZA GPS+Compass Upgrade | Датчик GPS + Компас для DJI NAZA.Обеспечивает такие функции как Alt Holt (Удержание высоты), Return to home (Возврат домой), GPS Hold (Удержание позиции), Intelligent Mode (Carefree) (управление независимо от ориентации мультикоптера), Failsafe autoland (автоматическое приземление), и т.п.BRAND=DJI GPSmodule | комплект | 8380,00 | ||||||||||||||||||||||||||||||
| DJI-NAZAV2-GPS | DJI NAZA GPS+Compass Upgrade (V2) | Датчик GPS + Компас для DJI NAZA (V2).Обеспечивает такие функции как Alt Holt (Удержание высоты), Return to home (Возврат домой), GPS Hold (Удержание позиции), Intelligent Mode (Carefree) (управление независимо от ориентации мультикоптера), Failsafe autoland (автоматическое приземление), и т.п.BRAND=DJI GPSmodule | комплект | 6913,50 | ||||||||||||||||||||||||||||||
| DJI-NAZA-M-Lite | DJI NAZA-M Lite Multirotor Stabilization System | Полетный контроллер DJI NAZA-M Lite с GPS для мультикоптера.Полетный контроллер для мультикоптеров DJI NAZA-M Lite с модулем GPS предназначен для установки на квадрокоптеры и гексакоптеры. Точное позиционирование, функции удержания позиции, автоматической стабилизации и возврата в точку старта при потере сигнала от аппаратуры радиоуправления, автоматическая посадка при снижения заряда аккумуляторов ниже установленной отсечки делают полетный контроллер NAZA-M Lite незаменимым помощником для начинающих пилотов мультикоптеров. Встроенные 3-х осевой гироскоп, 3-х осевой акселерометр и барометрический датчик, а так же GPS-модуль с встроенным компасом позволяют полетному контроллеру осуществлять управление мультроторной системой с максимальной точностью. DJI NAZA-M Lite — облегченная версия полетного контроллера NAZA-M для малоразмерных мультикоптеров. Эта система полностью обеспечивает стабильность и предсказуемость полета. В сравнении со «старшим братом» (DJI NAZA-M) она лишена следующих функций: возможности подключения системного подвеса Zenmuse, системного OSD для отображения полетных данных и возможности подключить модуль BlueTooth для регулировок и настройки с помощью смартфона. Так же отсутствует функция автоматического полета по заданным точкам. Особенности:  Комплектация: Технические характеристики: BRAND=DJI | комплект | 4505,93 | ||||||||||||||||||||||||||||||
| DJI-NAZA | DJI NAZA-M Multirotor Stabilization System | Полетный контроллер для мультикоптера DJI NAZA-M.GeneralBuilt-In Functions Autopilot Auto Level Fail-safe Low Voltage Protection S-Bus Receiver Support Peripheral Supported Multi-rotor Quad-rotor I, X; Hex-rotor I, V. Supported ESC output 400Hz refresh frequency. Recommended Transmitter PCM or 2.4GHz with minimum 4 channels. Assistant Software System Requirement Windows XP SP3 / Windows 7 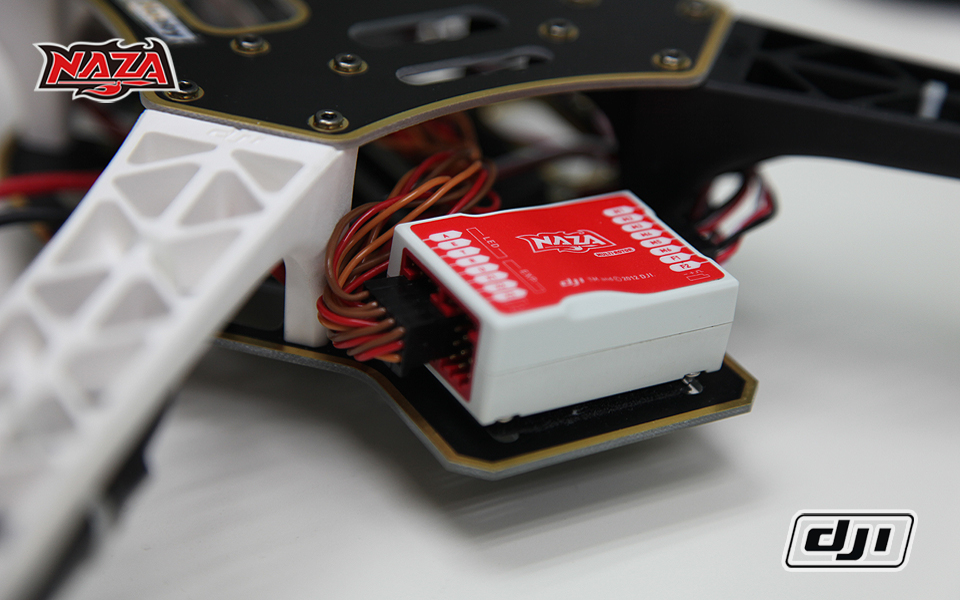
 Electrical &Mechanical
Electrical &Mechanical Working Voltage Range MC:4.8V~5.5V VU: 7.2V ~ 26.0 V (recommend 2S ~ 6S LiPo) Power Consumption MAX1. 5W (0.3A@5V) Normal:0.6W (0.12A@5V) Operating Temperature -10°C ~ 50°C Weight MC:25g VU:20g Dimensions MC: 45.5mm x 31.5mm x 18.5mm VU: 32.2mm x 21.1mm x 7.7mm Flight Performance (can be effected by mechanical performance and payloads) Max Yaw Angular Velocity 190° / s Max Tilt Angle 45° Ascent / Descent ±6m/s Basic Performance
Flight Performance
Hardware
BRAND=DJI | комплект | 9218,00 | ||||||||||||||||||||||||||||||
| DJI-NAZA-PMU-V2 | DJI NAZA-M PMU V2 | Модуль питания DJI NAZA-M V2.DJI Naza PMU V2 расширяет функциональность полетного контроллера и обеспечивает расширяемую шину CAN, которая позволяет поддерживать в полной мере фирменное многофункциональное iOSD и управление подвесом Zenmuse. Также он позволяет осуществить полную поддержку нового модуля светодиодной индикации со встроенным Bluetooth, что позволяет, дистанционно, с помощью программы на смартфоне или планшете Apple изменять настройки в полетном контроллере прямо в полете.BRAND=DJI | комплект | 2195,56 | ||||||||||||||||||||||||||||||
| DJI-NAZA-M-V2 | DJI NAZA-M V2 Multirotor Stabilization System | Полетный контроллер DJI NAZA-M V2 с GPS для мультикоптера.Отличительные особенности второй версии полетного контроллера DJI Naza-M V2:— светодиодный блок отделился от БЭКа и теперь это отдельный блок, который можно сменить на блок индикации со встроенным «блютуз» адаптером для связи с коптером в воздухе и корректировки параметров со смартфонов и планшетов Apple. — Отдельный БЭК с разъемом шины CAN, который открывает возможность подключения фирменной iOSD для отображения всей полетной информации с возможностью писать её в полетный лог, с последующим чтением на компьютере. — Отдельный БЭК позволяет подключить к коптеру подвес DJI Zenmuse HD с камерой GoPro 3 с полнофункциональным управлением. — Поддержка всех самых распространенных микшеров для коптеров: квадрокоптер, гексокоптер и октокоптер, в различных конфигурациях. — Поддержка коаксиальных модификаций: трикоптер и квадрокоптер. — Введен отдельный тумблер «Возврат домой», по команде которого коптер возвращается на точку взлета и есть возможность в любой момент вернуть управление на передатчик. — Введена автоматическая корректировка курса полета при смещении блока компаса и GPS. — Новый режим автоматического взлета. — Усовершенствованные алгоритмы полета. 
 
 

Полетные характеристики DJI Naza-M V2
Компоненты
BRAND=DJI | комплект | 8553,89 | ||||||||||||||||||||||||||||||
| DJI-WOOKONG-M | DJI Wookong-M Multi-Rotor Controller | Профессиональный полетный контроллер для мультикоптера DJI WooKong (WKM).Система стабилизации DJI Wookong Multi-Rotor является полной системой обеспечения автоматического полета для коммерческого и промышленного применения беспилотных мультироторных систем. Одним из основных отличий является то, что эта система позволяет без каких-либо модификаций использовать обычные регуляторы хода для бесколлекторных моторов, которые, как правило, используются в радиоуправляемых вертолетах. Полетный контроллер DJI Wookong использует высококачественную элементную базу, высокоточные гироскопы с температурной компенсацией дрейфа, и остальные датчики. Это позволяет на все 100% использовать систему для обеспечения автоматического полета без участия человека. Совокупность режимов позволяет держать высоту во время полета, и превосходно удерживает в точке благодаря точному GPS.    Типы мультироторных систем: Quad-Rotor / Hex-Rotor / Octo-Rotor Поддерживаемый сигнал для регуляторов : 200Hz Рекомендуемая аппаратура управления: минимум 5 каналов и имеющий failsafe Рекомендуемое питание: DC 7.4 ~ 22.2V Потребление: MAX 5W (0.9A@5V, 0.7A@5.8V,0.5A@7.4V,0.4A@8V) Температурный режим : -5°C to +60°C Погрешность удержания в точке: Высота: ± 0.5m Горизонт: ± 2m Стабильность на ветру: < 8m/s (17.7mph) Максимальный угол наклона: 30° Вертикальная скорость: 3m/s Specs General Controller: 51.2mm x 38mm x 15.3mm IMU: 41.4mm x 31.1mm x 27.8mm GPS module: 50mm (diameter) x 50mm LED: 25mm x 25mm x 7mm Three autopilot modes 2-axis gimbal support Go Home & Auto Landing Intelligent orientation control Low voltage protection S-BUS/S-BUS2/PPM receiver Flight Performance Protection Hovering Performance Vertical: ± 0.5m Horizontal: ± 2m Peripheral Extending Function BRAND=DJI | комплект | 14665,00 | ||||||||||||||||||||||||||||||
| DRAGON_OSD | DRAGON-OSD Dragon OSD Module v1,1 | Главный модуль автопилота-телеметрии Dragon OSD v.1.1 | шт | 9930,30 | ||||||||||||||||||||||||||||||
| DRAGON_OSD_50 | DRAGON-OSD-50 50A sensor for Dragon OSD | Датчик тока (до 50А) для телеметрии Dragon OSD. | шт | 900,85 | ||||||||||||||||||||||||||||||
| DRAGON_OSD_GPS | DRAGON-OSD-GPS 5Hz GPS for Dragon OSD | Приёмник-декодер GPS Sirf Star для телеметрии Dragon OSD. | шт | 1257,00 | ||||||||||||||||||||||||||||||
| DRAGON_OSD_USB | DRAGON-OSD-USB USB interface for Dragon OSD | USB-интерфейс для программирования настроек телеметрии Dragon OSD. | шт | 419,00 | ||||||||||||||||||||||||||||||
| DYS-GPS-PTS | DYS Foldable GPS Seat [DYS-GPS-PTS] | Складывающаяся стойка для приемника GPSaluminum alloy turning + CNC manufacturingFor M4 size stick, compatible with DJI GPS stick Weight: 4g GPSmodule | комплект | 685,59 | ||||||||||||||||||||||||||||||
| AIRSPEED-V3 | Eagle Tree Systems Airspeed Microsensor V3 [AIRSPEED-V3] | Airspeed MicroSensor V3 from EagleTree Systems. FEATURES: Uses a Prandtl style pitot-static tube to measure airspeed INCLUDES: One Airspeed MicroSensor V3 with instruction sheet REQUIRES: Installation on the airplane | комплект | 1801,28 | ||||||||||||||||||||||||||||||
| LXSDX2 | Eagle Tree Systems Altimeter MicroSensor for MicroPower - (LXSDX2) | Датчик высоты EagleTree. | комплект | 1884,87 | ||||||||||||||||||||||||||||||
| ALTITUDE-V3 | Eagle Tree Systems Altimeter Microsensor V3 - [ALTITUDE-V3] (ALTIMETERV3) | Датчик высоты Altimeter MicroSensor V3 from EagleTree Systems. FEATURES: Can be used with the Eagle Systems eLogger INCLUDES: One Altimeter MicroSensor V3 REQUIRES: Installation in aircraft SPECS: Weight: 4 grams (0.15 oz) | комплект | 1591,78 | ||||||||||||||||||||||||||||||
| ALTIMETERV4 | Eagle Tree Systems Altitude Micro Sensor V4 [ALTIMETERV4] | Цифровой высотомер Altimeter Micro Sensor V4 from EagleTree SystemsМожет применяться как автономно (отображает максимальную достигнутую высоту), так и в составе Eagle Tree eLogger + OSD с отображением текущих показателей высотыFEATURES: Uses barometric pressure to measure altitude of radio control model aircraft May be used in standalone mode or with the Eagle Tree Systems V3 or V4 eLogger Displays maximum altitude on the built-in used in standalone mode When connected to the V3 or V4 eLogger, altitude data can be downloaded, displayed and graphed using the eLogger’s Windows software Precalibrated, no user calibration required Advanced temperature compensation Metric or english units One year limited warranty through Eagle Tree Systems beginning at date of purchase INCLUDES: Altimeter Microsensor with Standalone Cable, eLogger Cable and Instruction Manual SPECS: Altitude Limit: Approx. 20,000 feet (6096m) above sea level Resolution: Approx. +/- foot (0.3m) Power Input: 4-16V (standalone mode) Weight: 0.15oz (4g) Dimensions: 1.1×0.62×0.4″ (28×16×10mm) COMMENTS: Not compatible with the V1 or V2 versions of the eLogger | комплект | 1131,30 | ||||||||||||||||||||||||||||||
| RPM-BRS-V2 | Eagle Tree Systems Brushless Electric Motor rpm Sensor [RPM-BRS-V2] (ETRP8003) | Датчик оборотов бесколлекторного двигателя для телеметрии EagleTree, Seagull Flight systems и Data Recorder v2 с версией прошивки v4.xx
Brushless RPM Sensor from EagleTree Systems. FEATURES: Measures RPM via pulses from one or two wires leading from the INCLUDES: Eagle Tree Brushless RPM Sensor with motor and universal receiver REQUIRES: Installation as described in the instruction sheet SPECS: Length: 0.73″ (18.5mm) COMMENTS: Brushed motor RPM can be measured with the Eagle Tree Magnetic or Optical (ETRP8001) RPM sensors. | комплект | 230,45 | ||||||||||||||||||||||||||||||
| RPM-KIT-BRS | Eagle Tree Systems Brushless Electric Motor rpm Sensor [RPM-KIT-BRS] | Датчик измерения оборотов бесколлекторных двигателей Длинна 18,5мм/ ширина 12мм/ толщина 3,5мм / вес 5грамм/ моторный провод 241мм/ интерфейсный кабель 292мм Для регистраторов EagleTree Systems | комплект | 867,33 | ||||||||||||||||||||||||||||||
| EE-FPV-GND | Eagle Tree Systems Eagle Eyes FPV Station [EE-FPV-GND] | EagleEyes FPV Station from EagleTree Systems. FEATURES: Receiver diversity INCLUDES: One EagleEyes FPV Station and instruction manual REQUIRES: Mini-B USB Cable SPECS: Length: 95mm (3.7″) The EagleEyesTM FPV Station integrates four of the main components you need for Model Airplane FPV on the ground, at a cost that’s lower than many of the individual components presently available! New: now includes clear plastic case with removable top, and mounts for the PowerPanel LCD display. Features: Two video inputs -NTSC/PAL, using your video receivers of any frequency. Video Input 2 is adjustable to match Video Input 1. Note that only one input needs to be used, if you are not using the Diversity feature. | комплект | 3770,58 | ||||||||||||||||||||||||||||||
| EAGLE-EYES | Eagle Tree Systems Eagle Eyes FPV Station with Plastic Case [EAGLE-EYES] | EagleEyes FPV Station with Plastic Case from EagleTree Systems. FEATURES: Receiver diversity INCLUDES: One EagleEyes FPV Station and instruction manual REQUIRES: Mini-B USB Cable SPECS: Length: 95mm (3.7″) The EagleEyesTM FPV Station integrates four of the main components you need for Model Airplane FPV on the ground, at a cost that’s lower than many of the individual components presently available! New: now includes clear plastic case with removable top, and mounts for the PowerPanel LCD display. Features: Two video inputs -NTSC/PAL, using your video receivers of any frequency. Video Input 2 is adjustable to match Video Input 1. Note that only one input needs to be used, if you are not using the Diversity feature. | комплект | 3980,50 | ||||||||||||||||||||||||||||||
| ELEC-EXP-100 | Eagle Tree Systems Electric Expander 100 amp [ELEC-EXP-100] | V2 Electric Expander V2 from EagleTree Systems. **Will not function with the new V3 Elogger.** FEATURES: Measures motor current by means of a tiny lightweight Hall effect INCLUDES: One Eagle Tree V2 Electric Expander with instruction sheet REQUIRES: Connecting to battery and recorder and configuring expander to SPECS: Motor Voltage: 0-50V | комплект | 2513,37 | ||||||||||||||||||||||||||||||
| LXMBS3 | Eagle Tree Systems e-Logger V2 w/Integrated Connectors [MPR-CONN] (LXMBS3) | Бортовой регистратор E-Logger V2 from EagleTree Systems. | комплект | 2304,50 | ||||||||||||||||||||||||||||||
| MPRV3-LEADS100 | Eagle Tree Systems e-Logger V3 100A w/Wire Leads - [MPRV3-LEADS100] | Бортовой регистратор от Eagle Tree Systems -- eLogger V3 (версия 3) с силовыми проводами без разъемов from EagleTree Systems. В комплекте с USB-кабелем и программным обеспечением на компакт-диске.Измеряет напряжение от 5 до 70 вольт с точностью 0,02Вольта, Измеяет ток до 100Ампер с точностью 0,02Ампера, Расход энергии около 30мА (без внешних датчиков), измерение температуры (с помощью доп. датчиков) от 0 до 424градусов цельсия. Измерение оборотов от 100 до 50000 об. в минуту,Вес около 25грамм Размеры 57х28х13мм Время записи зависит от частоты выборок, в среднем от 45 минут до многих часов в зависимости от настроек. | комплект | 2723,50 | ||||||||||||||||||||||||||||||
| MPRV3-CONN-100 | Eagle Tree Systems e-Logger V3 w/Integrated Connectors - [MPRV3-CONN-100] | eLogger V3 (версия 3) Бортовой регистратор с Т-коннекторами from EagleTree Systems. В комплекте с USB-кабелем и программным обеспечением на компакт-диске.Измеряет напряжение от 5 до 70 вольт с точностью 0,02Вольта, Измеяет ток до 100Ампер с точностью 0,02Ампера, Расход энергии около 30мА (без внешних датчиков), измерение температуры (с помощью доп. датчиков) от 0 до 424градусов цельсия. Измерение оборотов от 100 до 50000 об. в минуту,Вес около 25грамм Размеры 57х28х13мм Время записи зависит от частоты выборок, в среднем от 45 минут до многих часов в зависимости от настроек. | комплект | 2723,50 | ||||||||||||||||||||||||||||||
| MPRV4-CONN-100 | Eagle Tree Systems e-Logger V4 100A w/Integrated Connectors [MPRV4-CONN-100] | Модуль телеметрии MicroPower E-Logger V4 100A from EagleTree Systems.Будь то электромодель самолета, вертолета, автомобиля, лодки или любая другая, всегда нужно знать в каком состоянии и режиме находится электрооборудование. USB MicroPower E-Logger - то, что даст ответы на эти вопросы.Особенности: — Работает с токами до 100A и напряжениях от 5V до 70V — Вычисляет мощность, емкость аккумулятора, и др. для получени я полных данных полета — Поддерживает недорогие датчики температуры и оборотов (магнитные и оптические) — Поддерживает одновременное подключение датчиков температуры и оборотов, или два датчика температуры. — Весит всего 20г, за счет отсутствия проводов. — Поддерживает USB Live Mode, который позволяет в реальном времени на ПК видеть как работает модель — Настраиваемая частота записи данных (1-10 раз в секунду) и сжатие данных без потерь - для длительной записи — Поставляется с современным Windows интерфейсом для отображения данных и графиков — Мощное ПО позволяет создавать графики по показателям тока и напряжения. — Программное обеспечение обновляется через интернет. Сиситема телеметрии MicroPower комплектуется: USB кабель, диск, инструкция и собственно блок. 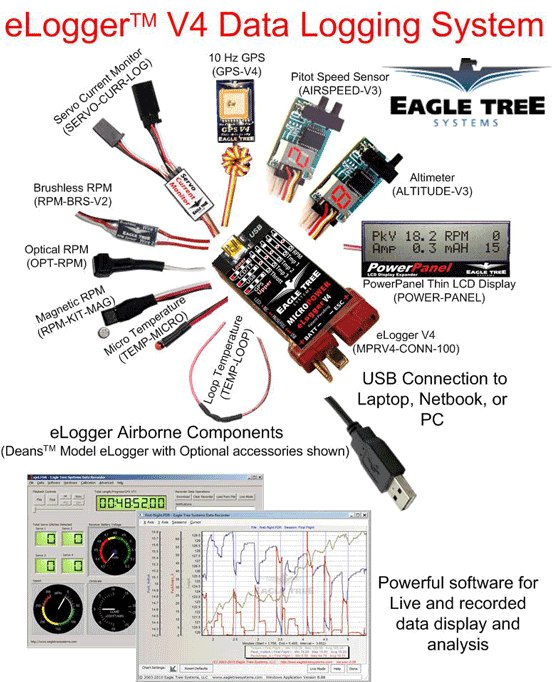 | комплект | 2932,58 | ||||||||||||||||||||||||||||||
| MPRV4-LEADS-100 | Eagle Tree Systems e-Logger V4 100A w/Wire Leads [MPRV4-LEADS-100] | Модуль телеметрии MicroPower E-Logger V4 100A from EagleTree SystemsБудь то электромодель самолета, вертолета, автомобиля, лодки или любая другая, всегда нужно знать в каком состоянии и режиме находится электрооборудование. USB MicroPower E-Logger - то, что даст ответы на эти вопросы.Особенности: — Работает с токами до 100A и напряжениях от 5V до 70V — Вычисляет мощность, емкость аккумулятора, и др. для получени я полных данных полета — Поддерживает недорогие датчики температуры и оборотов (магнитные и оптические) — Поддерживает одновременное подключение датчиков температуры и оборотов, или два датчика температуры. — Весит всего 20г, за счет отсутствия проводов. — Поддерживает USB Live Mode, который позволяет в реальном времени на ПК видеть как работает модель — Настраиваемая частота записи данных (1-10 раз в секунду) и сжатие данных без потерь - для длительной записи — Поставляется с современным Windows интерфейсом для отображения данных и графиков — Мощное ПО позволяет создавать графики по показателям тока и напряжения. — Программное обеспечение обновляется через интернет. Сиситема телеметрии MicroPower комплектуется: USB кабель, диск, инструкция и собственно блок. | комплект | 2932,58 | ||||||||||||||||||||||||||||||
| MPRV4-LEADS-150 | Eagle Tree Systems e-Logger V4 150A w/Wire Leads [MPRV4-LEADS-150] | 150 amp e-Logger V4 On-Board Data Logger from EagleTree Systems. FEATURES: Great for planes, helis, car, trucks and boats Accepts optional inexpensive sensors for GPS, temperature, RPM (brushless, magnetic or optical) airspeed, altitude, servo current and more Logs throttle movement with optional Y-cable Four times the memory capability of the V2 Current measured with a true Hall Effects sensor-not a resistance shunt that creates heat and robs power from the system Fully compatible with Windows Vista, 98SE, ME, Win2K and XP USB live mode support displays info from the model live on the bench on modeler’s PC All data is logged to permanent memory, which retains data even when power is removed, adjustable logging rate and lossless data compression for long log times State of the art Windows virtual playback display and graphing Internet updatable firmware One year limited warranty INCLUDES: 150 amp e-Logger V4 On-Board Data Logger, USB cable, and CD manual REQUIRES: Installation and setup following instructions on SPECS: Voltage Measurement: Approx 5V to 70V Voltage Resolution: Approx 0.02V Current Measurement: up to 100 Amps, (150 Amps with the MPRV3-LEADS-150) Current Resolution: approx 0.02 Amps (0.035 Amps with the MPRV3-LEADS-150) Current Draw: Approx 30 mA with no sensors Weight: Unit with Integrated Connectors: 0.9 oz (25 grams) Temperature: Dual inputs, 0° F to 424° F (three temp inputs) RPM Range: Approx 100 RPM to 50,000+ RPM Units of Measure Supported: English and Metric Size: Approx 2.25″ x 1″ x 0.5″ (57mm x 28mm x 13mm) including sensor pins Length of Wires: Approx 2.5″ (65mm) Record Time: Varies with sample rate, parameters being recorded, and «activeness» of model. Anywhere from around 45 minutes to many hours is attainable depending on these settings. | комплект | 3770,58 | ||||||||||||||||||||||||||||||
| CAB-EXP-EXT | Eagle Tree Systems Expander Extension Cable [CAB-EXP-EXT] | Expander Extension Cable for the EagleTree Systems R/C Data Recorder and eLogger. FEATURES: 3 pin extension cable INCLUDES: One Expander Extension Cable REQUIRES: Use with R/C Data Recorder or eLogger SPECS: Length: 324mm (12.76″)) | комплект | 209,08 | ||||||||||||||||||||||||||||||
| PITOT-KIT-STD | Eagle Tree Systems Extra Pitot Airspeed Tube [PITOT-KIT-STD] | Extra Pitot Airspeed Tube for the EagleTree Data Recorder. FEATURES: Blue silicone fuel tubing (extension from plastic tube) INCLUDES: One pitot tube REQUIRES: The Eagle Tree Systems R/C Flight Data Recorder SPECS: Length of fuel tubing: 38″ (965mm) | комплект | 209,08 | ||||||||||||||||||||||||||||||
| GFORCE-38 | Eagle Tree Systems G-Force Expander [GFORCE-38] | R/C Dual Axis G-Force Expander from EagleTree Systems. **Will not function with the new V3 Elogger.** FEATURES: G-Force expander INCLUDES: G-Force expander REQUIRES: A plane that is large enough to accomodate the extra equipment SPECS: Length: 1-1/2″ (38mm) COMMENTS: If you need further assistance go to www.eagletreesystems.com | комплект | 4692,21 | ||||||||||||||||||||||||||||||
| GFORCEHIGH | Eagle Tree Systems G-Force Micro Sensor 40g [GFORCEHIGH] | 3 Axis High G G-Force MicroSensor from EagleTree Systems. FEATURES: For recreational use in radio control aircraft and model rockets INCLUDES: 3 Axis High G G-Force MicroSensor with Standalone Cable and SPECS: Acceleration Recording Limits: COMMENTS: Not compatible with the Eagle Tree eLogger V1 or V2 or Data Recorder | комплект | 2681,18 | ||||||||||||||||||||||||||||||
| GFORCELOW | Eagle Tree Systems G-Force Micro Sensor 8g [GFORCELOW] | 3 Axis Low G G-Force MicroSensor from EagleTree Systems. FEATURES: For recreational use in radio control aircraft and model rockets INCLUDES: 3 Axis Low G G-Force MicroSensor with Standalone Cable and SPECS: Acceleration Recording Limits: COMMENTS: Not compatible with the Eagle Tree eLogger V1 or V2 or Data Recorder | комплект | 1130,88 | ||||||||||||||||||||||||||||||
| ETS-GPS-5HZ | Eagle Tree Systems GPS Expander - [ETS-GPS-5HZ] | GPS- модуль для системы телеметрии EagleTree Systems. Выдает координаты с частотой до 5 раз в секунду. | комплект | 7353,45 | ||||||||||||||||||||||||||||||
| GUARDIAN-EXP | Eagle Tree Systems Guardian-Exp Guardian Expander OSD [GUARDIAN-EXP] | Guardian Stabilization Expander from EagleTree Systems. FEATURES: For use with the Eagle Tree Systems OSD Pro Expander INCLUDES: Guardian Stabilization Expander with Wire Lead | комплект | 2304,08 | ||||||||||||||||||||||||||||||
| TEMP-MICRO | Eagle Tree Systems Micro Temperature Sensor [TEMP-MICRO] | Micro Temp Sensor for use with the EagleTree Data Recorder and MicroPower V2. FEATURES: Micro Sized Temp Sensor INCLUDES: One Micro Temp Sensor REQUIRES: Data Recorder or MicroPower V2 | комплект | 418,58 | ||||||||||||||||||||||||||||||
| MICROVECTOR | Eagle Tree Systems Micro Vector Flight Controller w/OSD | Полетный контроллер EagleTree Micro Vector с OSDWhether you’re into FPV racing, freestyling, or camshipping, the MicroVector (µV) integrated Flight Controller and OSD should be perfect for your small FPV mulitrotor or fixed wing model! | комплект | 4606,70 | ||||||||||||||||||||||||||||||
| LXPBP2 | Eagle Tree Systems Optical RPM Sensor - [OPT-RPM] (LXPBP2) | Optical RPM Sensor for use with the Data Recorder and MicroPower V2 from EagleTree Systems. FEATURES: Optical RPM Sensor INCLUDES: One Optical RPM Sensor REQUIRES: Data Recorder or MicroPower V2 | комплект | 628,08 | ||||||||||||||||||||||||||||||
| ETS-OSD | Eagle Tree Systems OSD Expander - [ETS-OSD] | Модуль наложения диагностической информации от системы телеметрии на видеосигнал from EagleTree Systems. | комплект | 2639,70 | ||||||||||||||||||||||||||||||
| ETS-OSD-PRO | Eagle Tree Systems OSD PRO EXPANDER - [ETS-OSD-PRO] | Модуль OSD PRO для телеметрии EagleTree Systems..Обеспечивает наложение на передаваемый с борта видеосигнал различной полётной информации.FEATURES: Fully configurable Provides graphics, voice announcements, alarms, acoustic variometer with total energy compensation, Home Arrow, Return to Home, Failsafe, "RADAR", waypoints, a flight simulator for testing and many other features | комплект | 3770,58 | ||||||||||||||||||||||||||||||
| PITOTKITV3 | Eagle Tree Systems Pitot Static Tube Kit [PITOTKITV3] | Pitot Static Tube Kit V3 from EagleTree Systems. FEATURES: Brass construction INCLUDES: One Pitot Tube Kit V3 REQUIRES: Use with R/C Data Recorder and Airspeed Expander from Eagle Tree | комплект | 334,78 | ||||||||||||||||||||||||||||||
| LXNDU3 | Eagle Tree Systems Power Panel LCD Display - [POWER-PANEL] (LXNDU3) | Power Panel LCD Display Expander from EagleTree Systems.. FEATURES: Ultra thin LCD display connects to the MicroPower E-logger (ETRP8000 INCLUDES: Eagle Tree Power Panel LCD Display Expander with 11″ (279mm) data SPECS: Display: 16×2 character LCD | комплект | 1256,58 | ||||||||||||||||||||||||||||||
| FDR-STD-KIT | Eagle Tree Systems R/C Flight Data Recorder V-2 [FDR-STD-KIT] | R/C Flight Data Recorder V2 from EagleTree Systems. FEATURES: New smaller USB Flight Data Recorder Integrated RPM and temperature sensing Flight data recorder with USB port for reading flight data Continuous inflight logging of: ailerons, rudder, throttle, elevator, altitude, airspeed and receiver battery voltage USB based PC flight playback After you have flown you can review the flight with your PC, you’ll be able to review: -Notifications — information about the flight -Airspeed — airspeeds from 9 to 290 mph -Altitude — information in graphic and numeric format — will record up to 25,000 feet -Flight Length/Progress — records total length of flight or up to a certain point -Max/Min/Current — When stopped, these readouts indicate the max airspeed detected, the lowest battery voltage detected and the highest altitude detected When playing back, these meters indicate the current speed, battery current speed, battery level and altitude Battery Voltage — indicates the current voltage during playback Fully compatible with Windows 98SE, ME, Windows 2K and XP INCLUDES: Flight Data Recorder USB cable Four «Y» cables with Futaba J plugs Pitot tubing Plastic Pitot tubing extension 1 Temperature Sensor 1 RPM sensor Two sets of magnets Battery backup harness Setup Instruction sheet REQUIRES: A plane that is large enough to accomodate the extra equipment SPECS: Flight recorder:Length: 1-15/16″ (49mm) Width: 1-5/16″ (32mm) Height: 11/16″ (16mm) Current draw: 35 mA Recorder weight: 1 oz Recorder weight with cables: 1.5 oz Voltage: 4.8-6.0v COMMENTS: Extra Pitot airspeed tube: ETRP2000 Electric Expander: ETRP9001 | комплект | 8496,78 | ||||||||||||||||||||||||||||||
| FDR-PRO-KIT | Eagle Tree Systems R/C Pro Flight Data Recorder V2 [FDR-PRO-KIT] | R/C Flight Data Recorder V2 from EagleTree Systems.. FEATURES: New smaller USB Flight Data Recorder Integrated RPM and temperature sensing Flight data recorder with USB port for reading flight data Continuous inflight logging of: ailerons, rudder, throttle, elevator, altitude, airspeed and receiver battery voltage USB based PC flight playback After you have flown you can review the flight with your PC, you’ll be able to review: -Notifications — information about the flight -Airspeed — airspeeds from 9 to 290 mph -Altitude — information in graphic and numeric format — will record up to 25,000 feet -Flight Length/Progress — records total length of flight or up to a certain point -Max/Min/Current — When stopped, these readouts indicate the max airspeed detected, the lowest battery voltage detected and the highest altitude detected When playing back, these meters indicate the current speed, battery current speed, battery level and altitude Battery Voltage — indicates the current voltage during playback Fully compatible with Windows 98SE, ME, Windows 2K and XP INCLUDES: Flight Data Recorder USB cable Four «Y» cables with Futaba J plugs Pitot tubing Plastic Pitot tubing extension 1 Temperature Sensor 1 RPM sensor Two sets of magnets Battery backup harness Setup Instruction sheet REQUIRES: A plane that is large enough to accomodate the extra equipment SPECS: Flight recorder:Length: 1-15/16″ (49mm) Width: 1-5/16″ (32mm) Height: 11/16″ (16mm) Current draw: 35 mA Recorder weight: 1 oz Recorder weight with cables: 1.5 oz Voltage: 4.8-6.0v COMMENTS: Extra Pitot airspeed tube: ETRP2000 Electric Expander: ETRP9001 | комплект | 14706,36 | ||||||||||||||||||||||||||||||
| CAB-RCA-SRV | Eagle Tree Systems RCA Male Servo Connector Adapt [CAB-RCA-SRV] | Male RCA to Servo Connector from EagleTree Systems for the OSD Expander FEATURES: Adapts OSD Expander to Servo INCLUDES: One Male RCA to Servo Connector REQUIRES: Use with OSD Expander SPECS: Length of Wire: 275mm (10.8″) | комплект | 418,58 | ||||||||||||||||||||||||||||||
| RPM-KIT-MAG | Eagle Tree Systems RPM Sensor w/4 Magnets - [RPM-KIT-MAG] | Датчик холла и 4 магнита для измерения частоты вращения. Для регистраторов EagleTree Systems | комплект | 418,58 | ||||||||||||||||||||||||||||||
| CAB-RPM-EXT | Eagle Tree Systems RPM/Temp Extension Cable [CAB-RPM-EXT] | Extension Cable for the RPM and Temperature Sensors from EagleTree Systems. FEATURES: On one end of the wire is a male «J» connector and on the other end INCLUDES: Extension cable REQUIRES: Installing between the Data Recorder or MicroPower V2 and sensor SPECS: Length: 11.5″ (292mm) | комплект | 209,08 | ||||||||||||||||||||||||||||||
| SEA-PRO-900 | Eagle Tree Systems Seagull Pro Wirelss Dashboard Flight [SEA-PRO-900] | Seagull Wireless Dashboard Flight System from EagleTree Systems. FEATURES: Installs easily in nitro, electric, or gasoline powered model airplanes and helicopters Fully compatible with Win 98SE, ME, Win2K and XP Provides up to 20 channels of real time data about model displayed on scrollable pages of LCD data dashboard Partial list of what can be displayed includes; Servo Movements-displays positions of up to 4 servos Receiver Battery Voltage Speed from Altitude/Climb Rate to 25,000ft (7620m) RPM Temperature Software switchable sample rates resolution or longer battery life Self-contained telemetry receiver attaches to radio or can be monitored by pit crew-no laptops needed Transmitter is powered by receiver battery-no extra battery needed 65,536 unique IDs (programmable) means interference problems are extremely unlikely Dashboard a USB peripheral that can be plugged into a laptop to get full screen live display and recording on laptop Alarms can be set for low battery, high temp, stall speed, high RPM and much more Operates at 900MHz spread spectrum (FCC certified version) or 433MHz (EU version-check local regulations) One year limited warranty INCLUDES: Real Time Data Dashboard Wireless Telemetry Transmitter Flight Data Recorder Pro Temperature Sensor RPM Sensor with Magnets Two 3′ (91cm) Pitot Tube Hoses Brass Pitot Tube Brass Static Tube For Servo Y cables USB Cable Windows Battery Backup Harness (use optional) Instruction Manual REQUIRES: Installing on model and connecting all cables SPECS: Transmitter; Frequency Range: 902-908MHz FCC Approval: 15.247 Frequency Hopping Spread Spectrum Maximum Output Power: Approx. 200 mWatt Dimensions: 2-3/4″ x 1-1/4″ x 1/4″ (70mm x 32mm x 6mm) approx. Weight: 0.5oz (14g) approx, transmitter only Temperature Range: TX Antenna: Thin flexible stainless whip Power: taken from Recorder/Receiver battery Current Draw: Transmitter + Recorder, average <50 milliamp Receiver; Sensitivity: <-110dBm nom. RX Antenna: Thin flexible stainless whip Temperature Range: Battery: Standard 9V Display: 16×2 character LCD Pushbuttons: 4 Contrast Adjustment: Potentiometer behind battery door USB Connection: Yes Flight Data Recorder; Airspeed: Around 9mph (14.4kph) minimum, approx. 290mph (467kph) max Altitude: 0-32,000′ (9754m) in approx 8′ (2.4m) increments Operational Voltage: 4.35V-7.0V Current Draw: <35mA @4.8V Weight: Recorder, 4 Y cables, RPM & Temp Sensors & Pitot Tube 1.5oz (42.5g) approx. Temperature: Dual Inputs, 0° F-424° F RPM Range: 100 RPM-40,000+RPM (approx) Units Supported: English & Metric Measurements: 1.97″ x 1.38″ x 0.67″ (50mm x 35mm x 17mm) Record time: Varies with sample rate, paramenters being recorded, and «activeness» of flight. Aound 8 minutes to several hours is attainable depending on these settings. COMMENTS: Available Accessories; Electric Expander: ETRP9001 Exhaust Gas Temp Expander G-Force Expander: ETRP9002 Extra Pitot Tube: ETRP2000 Extra Temperature Sensor: ETRP7000 | комплект | 24091,98 | ||||||||||||||||||||||||||||||
| SEA-PRO-24-02 | Eagle Tree Systems Seagull Pro Wrls DshbrdFlghtSys2.4GH [SEA-PRO-24-02] | Seagull Wireless Dashboard Flight System Pro Version from EagleTree Systems. FEATURES: Fully Compatible with Windows Vista 98SE, ME, Win2K and XP INCLUDES: Real Time Data Dashboard REQUIRES: Installing all sensors and cables and connecting to laptop if desired | комплект | 31424,48 | ||||||||||||||||||||||||||||||
| SEA-FLIGHT-900 | Eagle Tree Systems Seagull Wireless Dashboard Flight System (900MHz) [SEA-FLIGHT-900] | Система телеметрии (удаленного мониторинга) модели с радиоканалом 900МГц
Измеряет высоту и скорость ( с помощью датчиков давления), температуру, токи и напряжения, возможна интеграция с модулем GPS. Seagull Wireless Dashboard Flight System from EagleTree Systems. FEATURES: Installs easily in model airplanes, helicopters, boats and cars and provides real time data at modeler’s fingertips Provides up to 20 channels of data about model displayed on scrollable pages of LCD data dashboard Partial list of what can be displayed includes; Servo Movements-displays positions of up to 4 servos Receiver Battery Voltage Speed Altitude/Climb Rate RPM Temperature Software switchable sample rates resolution or longer battery life Self-contained telemetry receiver attaches to radio or can be monitored by pit crew-no laptops needed Transmitter is powered by receiver battery-no extra battery needed Built-in variometer support for audible and visual climb rate monitoring of airplane 65,536 unique IDs (programmable) means interference problems are extremely unlikely System receiver is a USB peripheral that can be plugged into a laptop to get full screen live display and recording on laptop screen Alarms can be set for low battery, high temp, stall speed, high RPM and much more Operates at 900MHz spread spectrum, see COMMENTS below One year limited warranty INCLUDES: Real Time Data Dashboard Wireless Telemetry Transmitter Flight Data Recorder Four Wire Cables 3′ (91cm) Pitot Tube Hose Plastic Pitot Tube Extension Temperature Sensor RPM Sensor Four Magnets Custom USB Cable Battery Backup Harness (use optional) Instruction Manual REQUIRES: Installing on model and connecting all cables SPECS: Transmitter; Frequency Range: 902-908MHz FCC Approval: 15.247 Frequency Hopping Spread Spectrum Maximum Output Power: Approx. 200 mWatt Dimensions: 2-3/4″ x 1-1/4″ x 1/4″ (70mm x 32mm x 6mm) approx. Weight: 0.5oz (14g) approx, transmitter only Temperature Range: TX Antenna: Thin flexible stainless whip Power: taken from Recorder/Receiver battery Current Draw: Transmitter + Recorder, average <50 milliamp Receiver; Sensitivity: <-110dBm nom. RX Antenna: Thin flexible stainless whip Temperature Range: Battery: Standard 9V Display: 16×2 character LCD Pushbuttons: 4 Contrast Adjustment: Potentiometer behind battery door USB Connection: Yes Flight Data Recorder; Airspeed: Around 9mph (14.4kph) minimum, approx. 290mph (467kph) max Altitude: 0-32,000′ (9754m) in approx 8′ (2.4m) increments Operational Voltage: 4.35V-7.0V Current Draw: <35mA @4.8V Weight: Recorder, 4 Y cables, RPM & Temp Sensors & Pitot Tube 1.5oz (42.5g) approx. Temperature: Dual Inputs, 0° F-424° F RPM Range: 100 RPM-40,000+RPM (approx) Units Supported: English & Metric COMMENTS: Currently approved for United States use only. Available Accessories; Electric Expander: ETRP9001 Exhaust Gas Temp Expander G-Force Expander: ETRP9002 Extra Pitot Tube: ETRP2000 Extra Temperature Sensor: ETRP7000 | комплект | 19063,96 | ||||||||||||||||||||||||||||||
| SEA-FLIGHT-900-200 | Eagle Tree Systems Seagull Wireless Dashboard Flight System, 900 MHz, 200mW (4643) [SEA-FLIGHT-900-2 | Система телеметрии (удаленного мониторинга) модели с радиоканалом 900МГц 200мВт from EagleTree Systems. Измеряет высоту и скорость ( с помощью датчиков давления), температуру, токи и напряжения, возможна интеграция с модулем GPS. | комплект | 13734,61 | ||||||||||||||||||||||||||||||
| SERVO-CURR-LOG | Eagle Tree Systems Servo Current MicroSensor [SERVO-CURR-LOG] | Servo Current Logger from EagleTree Systems.. FEATURES: Plugs into MicroPower eLogger, Seagull or Data Recorder and provides current/amperage measurement of servos or other low amperage devices from Servo current can be displayed and analyzed in three ways-live and maximum current displayed on Power Panel LCD or Seagull Dashboard Display, servo current is logged in Recorder for download to PC and servo current is displayed and graphed with Eagle Tree Windows application or spreadsheet program Daisy-chains with all other MicroPower sensors INCLUDES: Eagle Tree Systems Servo Current Logger with two universal servo connectors, instruction sheet REQUIRES: Updating to Eagle Tree Windows Application Version 5.50 or higher Connecting sensor to MicroPower eLogger and Data Recorder | комплект | 1570,62 | ||||||||||||||||||||||||||||||
| CAB-SPEK | Eagle Tree Systems Spektrum AR9000/TR R921 Intrfce Cble [CAB-SPEK] | Interface Cable for the AR9000 and JR R921 Receivers from EagleTree Systems. FEATURES: Works with the eLogger V3, (NOT the eLogger V1 or V2) and also works INCLUDES: Interface Cable and printed version of manual REQUIRES: Plugs into data port of the AR9000 or JR R921 receivers and the GPS COMMENTS: Will not work with any other receiver brand or model | комплект | 301,05 | ||||||||||||||||||||||||||||||
| LXFVF6 | Eagle Tree Systems Temperature Sensor - [TEMP-LOOP] (LXFVF6) | Датчик температуры EagleTree Systems. | комплект | 418,58 | ||||||||||||||||||||||||||||||
| THERM-EXP-CHT | Eagle Tree Systems Thermocouple Expander w/CHT Probe [THERM-EXP-CHT] | Data Recorder Thermocouple Expander with CHT Probe from EagleTree Systems.. FEATURES: Works with the Eagle Tree Systems R/C Data Recorder INCLUDES: One Eagle Tree Systems Data Recorder Thermocouple Expander with REQUIRES: Eagle Tree Systems Flight Data Recorder Pro, V2, Glide or | комплект | 4985,51 | ||||||||||||||||||||||||||||||
| GPS-V4 | Eagle Tree Systems Tiny 10Hz GPS V4 Expander [GPS-V4] | 10Hz GPS V4 Expander Module for the EagleTree Data Recorder and V3 eLogger Products. FEATURES: For use in either RC vehicles or aircraft, this module allows modelers to log vehicle position, visualize model on a 3D graph against a photo image of field or track and see position of model on the Seagull Dashboard screen Google Earth software allows data to be easily and fully visualized 3D position graphing in the Virtual Dashboard software with support for overlayed images of field or track Latitude/longitude, GPS speed, GPS altitude, course, distance to operator and UTC timestamp One year limited warranty through mannufacturer beginning at date of purchase INCLUDES: 10Hz GPS Expander Module with REQUIRES: Plugging into Data recorder and installing in model SPECS: Update Rate: 10Hz WAAS and EGNOS support Time to Fix: 1 sec hot, 36 sec cold (typ) Speed Accuracy: Approx. 0.1 m/s Position Accuracy: aprox 8.2′ (2.5m) Antenna: Built-in patch Sensitivity: Approx. 165dBm Datum: WGS84 Length: 1.4″ (35mm) Width: 0.9″ (20mm) Thickness: 0.3″ (8mm) Weight: 0.4oz (11g) Current Consumption: Less than 04 mA when tracking COMMENTS: This expander is compatible with Eagle Tree Systems eLogger V3, Recorder V2, Car and Boat Data recorders with firmware version 5.55 or higher. It is also compatible with Seagull Dashboards with firmware version 4.76 or higher. For firmware lower than these versions, e-mail support@eagletreesystem for upgrade info. | комплект | 3351,58 | ||||||||||||||||||||||||||||||
| PITOT-EXP | Eagle Tree Systems Vector Airspeed Expander w/Pitot [PITOT-EXP] | Датчик воздушной скорости с трубкой Пито для системы EagleTree Vector Flight Controller + OSDСовместим только с Vector Flight Controller + OSD Особенности: Комплектация | комплект | 1885,08 | ||||||||||||||||||||||||||||||
| VEC-PKG-DEANS | Eagle Tree Systems Vector Flight Controller w/ OSD, GPS and PSU Sensor (Deans) [VEC-PKG-DEANS] | Полетный контроллер EagleTree Vector с OSD, GPS и датчиком тока (разъемы Deans T-conn)Годы, проведенные за разработкой абсолютно нового полетного контроллера, не прошли даром. Vector - это небольшой, легкий, простой в использовании продукт, обладающий всеми качествами, о которых мы, любители FPV, могли только мечтать.
 
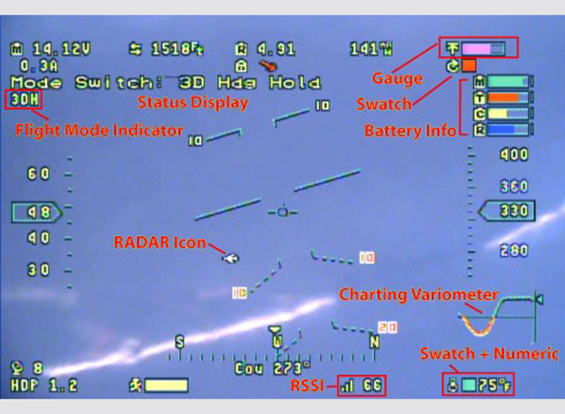 Полноцветный OSD Встроенная в Vector система отображения полетной информации обеспечивает сглаженную и четкую цветную картинку, причем, все цвета полностью настраиваются. Практически все параметры телеметрии могут отображаться тремя способами: число, шкала или графика. Числовой формат отображения информации предполагает индикацию настроенных значений "тревоги" цветным минганием. В режиме "шкала" настраиваются цветовые пороги значения. Опция "графика" создает на экране квадрат с запрограммированным изменением цвета, что позволяет легко привлечь внимание к параметру тогда, когда это необходимо. Опция "Отключенная камера": Если Ваша камера в полете отсоединилась/сгорела/оторвалась (нужное подчеркнуть), отображение телеметрии все равно продолжает работать. Эту функцию так же удобно использовать если Вы хотите настроить устройства с пульта, но камера при этом отключена. Функция голосовых оповещений: Vektor может периодически проговаривать текущие значения полетной информации или запрограммированные пороговые значения. Вариометр: Vector является первым полетным контроллером, который позволяет отображать параметры вариометра как графическим индикатором, так и акустическим сигналом. Вариометр полностью программируется в соответствии с Вашим вкусом. RSSI: Vector поддерживает 4 типа сигнала RSSI: Аналоговый, PCM, Spektrum, виртуальный SPPM RSSI. Полетный контроллер Основанный на проверенной технологии стабилизации Guardian, встроенный в Vector полнофункциональный полетный контроллер чувствует себя как дома как на самолетах с неподвижным крылом, так и на мультироторных аппаратах. И, так как контроллер полностью интегрирован с OSD, абсолютно все можно регулировать с помощью экранных меню, больше нет необходимости тащить на поле ноутбук или другие устройства. При желании, даже возможно переставить Vector с самолета на мультироторный аппарат прямо в поле, и при этом Вам не потребуется конфигурирование устройства с помощью ПК! Полетные режимы: Доступно несколько полетных режимов, которые легко выбираются с помощью одного или нескольких переключателей на вашей аппаратуре управления: - 2D: выравнивание мультироторного аппатрата или самолета, отключаемая опция выравнивания по высоте и стабилизация курса - 3D: режим 3D с отключаемой опцией сохранения направления полета, программируются расходы по тангажу, крену и рысканью. Режимы GPS: Поддерживаются несколько режимов работы GPS: возврат домой (RTH), геозона (Geofence), удержание высоты (Loiter), декартовый (Cartesian) и полярный (Polar). Интерфейс радиоуправления Входной жгут проводов с подписанными разъемами позволяет легко подключить Vector к любому приемнику. Поддерживается 3 типа входного сигнала: Стандартный / PCM: просто подключите помеченные разъемы Vector в соответствующие каналы приемника SPPM и S-BUS: один кабель подключается к разъему SPPM или S-BUS для уменьшения количества проводки и повышения гибкости соединения. Программное обеспечение на ПК позволяет полностью настроить значения до 8 последовательных каналов, чем обеспечивает простой и удобный доступ ко всем функциям OSD. Полетные режимы Vector переключаются с помощью двух- или трехпозиционного тумблера на Вашей аппаратуре. Кроме того, можно использовать дополнительный переключатель «под-режимов», который значительно расширяет возможности пилота что-то переключить прямо во время полета. Назначение каждого положения переключателей легко программируется через меню Vector. Датчик тока со встроенным блоком питания Устали от использования нескольких батарей, LC фильтров, BEC-ов и прочей фигни? Датчик тока Vector позволяет легко и просто запитать все Ваше бортовое оборудование. Он доступен с тремя типами разъемов: Т-образные, XT60 или проводные выводы без разъемов. Высокоэффективный блок питания работает с батареями напряжением до 6S и выдает стабилизированные 12В и 5В с максимальным током нагрузки 1,5А на канал. Этого вполне достаточно для питания большинства FPV оборудования, а так же питания приемника мультироторного аппарата с регуляторами типа «opto» без установки внешнего BEC. Обратите внимание, что стабилизатор 12V не повышает напряжение в отличие от импульсных стабилизаторов SEPIC. Тем не менее, 12-вольтовая цепь питания имеет уникальную особенность Low Voltage Loss (низкая потеря напряжения), что выражается в фактическом падении напряжения по отношению к батарее всего на 0,5В при использовании 3S батареи с напряжением менее 12,5В. Например, если на выходе 3S батареи 11,5В, то на выходе стабилизатора будет около 11В. Другие аналогичные стабилизаторы напряжения без повышающего преобразователя обычно просаживают выходное напряжения на 1,3В или более. Кроме того, SEPIC и други повышающие преобразователи напряжения, как правило, гораздо менее эффективны и выдают гораздо больше высокочастотных помех, которые Вам совсем не нужны. Все известные камеры и большинство передатчиков будут хорошо работать во всем диапазоне напряжения 3S батарей. Обратитесь к инструкции по эксплуатации Вашего передатчика, чтобы уточнить это. Если Вашему передатчику все же необходим повышающий преобразователь для работы в нижнем диапазоне напряжения 3S , AV кабель оснащен разъемами JST, в которые его легко установить без всякой пайки и подрезания проводов. Простота подключения Фильтрующий блок питания и инновационный жгут проводов позволяют легко подключить к Vector 5В и 12В камеры и передатчики без дополнительных питающих проводов. Если камера и передатчик уже оснащены серво-разъемами, то Вам остается только подключить их в подписанные коннекторы, выбрать соответствующее напряжение, и можно взлетать. И, если даже вы предпочитаете использовать 2 или даже 3 полетные батареи, дополнительные фильтры, преобразователи напряжения и прочее, все это легко подключается без необходимости заново все переподключать. Жгут так же позволяет переставлять Vector с модели на модель не снимая все проводки. Мощный софт для ПК Хотите настроить Vector через ПК или ноутбук? С помощью мощной программы и USB - интерфейса сделать это легко и просто. Вид полетного экрана настраивается с помощью механизма Drag and Drop (перетащи и брось). Просто перетаскивайте нужные параметры на полетный экран и сразу смотрите, как это будет выглядеть. Файлы конфигурации позволяю легко перемещать Vector между моделями без необходимости заново все перенастраивать. В программе Вы найдете вкладки визуализации GPS, менеджера пользовательских путевых точек (не переживайте, как и в старой версии, это всего лишь значения координат, сохраненные в памяти и не имеющие никакого отношения к навигационным функциям), и много другое для удобной настройки всех возможностей Vector. Запись данных и телеметрии в лог Конечно, Vector может сохранять данные со всех датчиков и параметры GPS во внутреннюю память, и наше программное обеспечение позволяет отображать эти данные, строить графики и сохранять их на ПК. Поддерживается запись как постоянно изменяемых данных, так и пороговых значений. Vector встраивает в видеосигнал телеметрию для наземной станции EagleEyes. Кроме того, Vector оснащен портом UART, совместимым с передатчиками телеметрии и другим оборудованием на открытом исходном коде. В будущем мы планируем использовать интерфейс UART для различных функций телеметрии. 
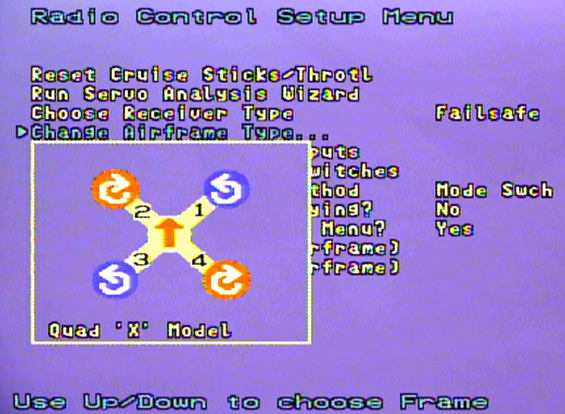 | комплект | 14957,67 | ||||||||||||||||||||||||||||||
| VEC-PKG-LEADS | Eagle Tree Systems Vector Flight Controller w/ OSD, GPS and PSU Sensor (Wire Leads) [VEC-PKG-LEADS] | Полетный контроллер EagleTree Vector с OSD, GPS и датчиком тока (силовые провода)Годы, проведенные за разработкой абсолютно нового полетного контроллера, не прошли даром. Vector - это небольшой, легкий, простой в использовании продукт, обладающий всеми качествами, о которых мы, любители FPV, могли только мечтать.
Полноцветный OSD Встроенная в Vector система отображения полетной информации обеспечивает сглаженную и четкую цветную картинку, причем, все цвета полностью настраиваются. Практически все параметры телеметрии могут отображаться тремя способами: число, шкала или графика. Числовой формат отображения информации предполагает индикацию настроенных значений "тревоги" цветным минганием. В режиме "шкала" настраиваются цветовые пороги значения. Опция "графика" создает на экране квадрат с запрограммированным изменением цвета, что позволяет легко привлечь внимание к параметру тогда, когда это необходимо. Опция "Отключенная камера": Если Ваша камера в полете отсоединилась/сгорела/оторвалась (нужное подчеркнуть), отображение телеметрии все равно продолжает работать. Эту функцию так же удобно использовать если Вы хотите настроить устройства с пульта, но камера при этом отключена. Функция голосовых оповещений: Vektor может периодически проговаривать текущие значения полетной информации или запрограммированные пороговые значения. Вариометр: Vector является первым полетным контроллером, который позволяет отображать параметры вариометра как графическим индикатором, так и акустическим сигналом. Вариометр полностью программируется в соответствии с Вашим вкусом. RSSI: Vector поддерживает 4 типа сигнала RSSI: Аналоговый, PCM, Spektrum, виртуальный SPPM RSSI. Полетный контроллер Основанный на проверенной технологии стабилизации Guardian, встроенный в Vector полнофункциональный полетный контроллер чувствует себя как дома как на самолетах с неподвижным крылом, так и на мультироторных аппаратах. И, так как контроллер полностью интегрирован с OSD, абсолютно все можно регулировать с помощью экранных меню, больше нет необходимости тащить на поле ноутбук или другие устройства. При желании, даже возможно переставить Vector с самолета на мультироторный аппарат прямо в поле, и при этом Вам не потребуется конфигурирование устройства с помощью ПК! Полетные режимы: Доступно несколько полетных режимов, которые легко выбираются с помощью одного или нескольких переключателей на вашей аппаратуре управления: - 2D: выравнивание мультироторного аппатрата или самолета, отключаемая опция выравнивания по высоте и стабилизация курса - 3D: режим 3D с отключаемой опцией сохранения направления полета, программируются расходы по тангажу, крену и рысканью. Режимы GPS: Поддерживаются несколько режимов работы GPS: возврат домой (RTH), геозона (Geofence), удержание высоты (Loiter), декартовый (Cartesian) и полярный (Polar). Интерфейс радиоуправления Входной жгут проводов с подписанными разъемами позволяет легко подключить Vector к любому приемнику. Поддерживается 3 типа входного сигнала: Стандартный / PCM: просто подключите помеченные разъемы Vector в соответствующие каналы приемника SPPM и S-BUS: один кабель подключается к разъему SPPM или S-BUS для уменьшения количества проводки и повышения гибкости соединения. Программное обеспечение на ПК позволяет полностью настроить значения до 8 последовательных каналов, чем обеспечивает простой и удобный доступ ко всем функциям OSD. Полетные режимы Vector переключаются с помощью двух- или трехпозиционного тумблера на Вашей аппаратуре. Кроме того, можно использовать дополнительный переключатель «под-режимов», который значительно расширяет возможности пилота что-то переключить прямо во время полета. Назначение каждого положения переключателей легко программируется через меню Vector. Датчик тока со встроенным блоком питания Устали от использования нескольких батарей, LC фильтров, BEC-ов и прочей фигни? Датчик тока Vector позволяет легко и просто запитать все Ваше бортовое оборудование. Он доступен с тремя типами разъемов: Т-образные, XT60 или проводные выводы без разъемов. Высокоэффективный блок питания работает с батареями напряжением до 6S и выдает стабилизированные 12В и 5В с максимальным током нагрузки 1,5А на канал. Этого вполне достаточно для питания большинства FPV оборудования, а так же питания приемника мультироторного аппарата с регуляторами типа «opto» без установки внешнего BEC. Обратите внимание, что стабилизатор 12V не повышает напряжение в отличие от импульсных стабилизаторов SEPIC. Тем не менее, 12-вольтовая цепь питания имеет уникальную особенность Low Voltage Loss (низкая потеря напряжения), что выражается в фактическом падении напряжения по отношению к батарее всего на 0,5В при использовании 3S батареи с напряжением менее 12,5В. Например, если на выходе 3S батареи 11,5В, то на выходе стабилизатора будет около 11В. Другие аналогичные стабилизаторы напряжения без повышающего преобразователя обычно просаживают выходное напряжения на 1,3В или более. Кроме того, SEPIC и други повышающие преобразователи напряжения, как правило, гораздо менее эффективны и выдают гораздо больше высокочастотных помех, которые Вам совсем не нужны. Все известные камеры и большинство передатчиков будут хорошо работать во всем диапазоне напряжения 3S батарей. Обратитесь к инструкции по эксплуатации Вашего передатчика, чтобы уточнить это. Если Вашему передатчику все же необходим повышающий преобразователь для работы в нижнем диапазоне напряжения 3S , AV кабель оснащен разъемами JST, в которые его легко установить без всякой пайки и подрезания проводов. Простота подключения Фильтрующий блок питания и инновационный жгут проводов позволяют легко подключить к Vector 5В и 12В камеры и передатчики без дополнительных питающих проводов. Если камера и передатчик уже оснащены серво-разъемами, то Вам остается только подключить их в подписанные коннекторы, выбрать соответствующее напряжение, и можно взлетать. И, если даже вы предпочитаете использовать 2 или даже 3 полетные батареи, дополнительные фильтры, преобразователи напряжения и прочее, все это легко подключается без необходимости заново все переподключать. Жгут так же позволяет переставлять Vector с модели на модель не снимая все проводки. Мощный софт для ПК Хотите настроить Vector через ПК или ноутбук? С помощью мощной программы и USB - интерфейса сделать это легко и просто. Вид полетного экрана настраивается с помощью механизма Drag and Drop (перетащи и брось). Просто перетаскивайте нужные параметры на полетный экран и сразу смотрите, как это будет выглядеть. Файлы конфигурации позволяю легко перемещать Vector между моделями без необходимости заново все перенастраивать. В программе Вы найдете вкладки визуализации GPS, менеджера пользовательских путевых точек (не переживайте, как и в старой версии, это всего лишь значения координат, сохраненные в памяти и не имеющие никакого отношения к навигационным функциям), и много другое для удобной настройки всех возможностей Vector. Запись данных и телеметрии в лог Конечно, Vector может сохранять данные со всех датчиков и параметры GPS во внутреннюю память, и наше программное обеспечение позволяет отображать эти данные, строить графики и сохранять их на ПК. Поддерживается запись как постоянно изменяемых данных, так и пороговых значений. Vector встраивает в видеосигнал телеметрию для наземной станции EagleEyes. Кроме того, Vector оснащен портом UART, совместимым с передатчиками телеметрии и другим оборудованием на открытом исходном коде. В будущем мы планируем использовать интерфейс UART для различных функций телеметрии.
| комплект | 14957,67 | ||||||||||||||||||||||||||||||
| VEC-PKG-XT60 | Eagle Tree Systems Vector Flight Controller w/ OSD, GPS and PSU Sensor (XT60) [VEC-PKG-XT60] | Полетный контроллер EagleTree Vector с OSD, GPS и датчиком тока (разъемы XT60)Годы, проведенные за разработкой абсолютно нового полетного контроллера, не прошли даром. Vector - это небольшой, легкий, простой в использовании продукт, обладающий всеми качествами, о которых мы, любители FPV, могли только мечтать.
Полноцветный OSD Встроенная в Vector система отображения полетной информации обеспечивает сглаженную и четкую цветную картинку, причем, все цвета полностью настраиваются. Практически все параметры телеметрии могут отображаться тремя способами: число, шкала или графика. Числовой формат отображения информации предполагает индикацию настроенных значений "тревоги" цветным минганием. В режиме "шкала" настраиваются цветовые пороги значения. Опция "графика" создает на экране квадрат с запрограммированным изменением цвета, что позволяет легко привлечь внимание к параметру тогда, когда это необходимо. Опция "Отключенная камера": Если Ваша камера в полете отсоединилась/сгорела/оторвалась (нужное подчеркнуть), отображение телеметрии все равно продолжает работать. Эту функцию так же удобно использовать если Вы хотите настроить устройства с пульта, но камера при этом отключена. Функция голосовых оповещений: Vektor может периодически проговаривать текущие значения полетной информации или запрограммированные пороговые значения. Вариометр: Vector является первым полетным контроллером, который позволяет отображать параметры вариометра как графическим индикатором, так и акустическим сигналом. Вариометр полностью программируется в соответствии с Вашим вкусом. RSSI: Vector поддерживает 4 типа сигнала RSSI: Аналоговый, PCM, Spektrum, виртуальный SPPM RSSI. Полетный контроллер Основанный на проверенной технологии стабилизации Guardian, встроенный в Vector полнофункциональный полетный контроллер чувствует себя как дома как на самолетах с неподвижным крылом, так и на мультироторных аппаратах. И, так как контроллер полностью интегрирован с OSD, абсолютно все можно регулировать с помощью экранных меню, больше нет необходимости тащить на поле ноутбук или другие устройства. При желании, даже возможно переставить Vector с самолета на мультироторный аппарат прямо в поле, и при этом Вам не потребуется конфигурирование устройства с помощью ПК! Полетные режимы: Доступно несколько полетных режимов, которые легко выбираются с помощью одного или нескольких переключателей на вашей аппаратуре управления: - 2D: выравнивание мультироторного аппатрата или самолета, отключаемая опция выравнивания по высоте и стабилизация курса - 3D: режим 3D с отключаемой опцией сохранения направления полета, программируются расходы по тангажу, крену и рысканью. Режимы GPS: Поддерживаются несколько режимов работы GPS: возврат домой (RTH), геозона (Geofence), удержание высоты (Loiter), декартовый (Cartesian) и полярный (Polar). Интерфейс радиоуправления Входной жгут проводов с подписанными разъемами позволяет легко подключить Vector к любому приемнику. Поддерживается 3 типа входного сигнала: Стандартный / PCM: просто подключите помеченные разъемы Vector в соответствующие каналы приемника SPPM и S-BUS: один кабель подключается к разъему SPPM или S-BUS для уменьшения количества проводки и повышения гибкости соединения. Программное обеспечение на ПК позволяет полностью настроить значения до 8 последовательных каналов, чем обеспечивает простой и удобный доступ ко всем функциям OSD. Полетные режимы Vector переключаются с помощью двух- или трехпозиционного тумблера на Вашей аппаратуре. Кроме того, можно использовать дополнительный переключатель «под-режимов», который значительно расширяет возможности пилота что-то переключить прямо во время полета. Назначение каждого положения переключателей легко программируется через меню Vector. Датчик тока со встроенным блоком питания Устали от использования нескольких батарей, LC фильтров, BEC-ов и прочей фигни? Датчик тока Vector позволяет легко и просто запитать все Ваше бортовое оборудование. Он доступен с тремя типами разъемов: Т-образные, XT60 или проводные выводы без разъемов. Высокоэффективный блок питания работает с батареями напряжением до 6S и выдает стабилизированные 12В и 5В с максимальным током нагрузки 1,5А на канал. Этого вполне достаточно для питания большинства FPV оборудования, а так же питания приемника мультироторного аппарата с регуляторами типа «opto» без установки внешнего BEC. Обратите внимание, что стабилизатор 12V не повышает напряжение в отличие от импульсных стабилизаторов SEPIC. Тем не менее, 12-вольтовая цепь питания имеет уникальную особенность Low Voltage Loss (низкая потеря напряжения), что выражается в фактическом падении напряжения по отношению к батарее всего на 0,5В при использовании 3S батареи с напряжением менее 12,5В. Например, если на выходе 3S батареи 11,5В, то на выходе стабилизатора будет около 11В. Другие аналогичные стабилизаторы напряжения без повышающего преобразователя обычно просаживают выходное напряжения на 1,3В или более. Кроме того, SEPIC и други повышающие преобразователи напряжения, как правило, гораздо менее эффективны и выдают гораздо больше высокочастотных помех, которые Вам совсем не нужны. Все известные камеры и большинство передатчиков будут хорошо работать во всем диапазоне напряжения 3S батарей. Обратитесь к инструкции по эксплуатации Вашего передатчика, чтобы уточнить это. Если Вашему передатчику все же необходим повышающий преобразователь для работы в нижнем диапазоне напряжения 3S , AV кабель оснащен разъемами JST, в которые его легко установить без всякой пайки и подрезания проводов. Простота подключения Фильтрующий блок питания и инновационный жгут проводов позволяют легко подключить к Vector 5В и 12В камеры и передатчики без дополнительных питающих проводов. Если камера и передатчик уже оснащены серво-разъемами, то Вам остается только подключить их в подписанные коннекторы, выбрать соответствующее напряжение, и можно взлетать. И, если даже вы предпочитаете использовать 2 или даже 3 полетные батареи, дополнительные фильтры, преобразователи напряжения и прочее, все это легко подключается без необходимости заново все переподключать. Жгут так же позволяет переставлять Vector с модели на модель не снимая все проводки. Мощный софт для ПК Хотите настроить Vector через ПК или ноутбук? С помощью мощной программы и USB - интерфейса сделать это легко и просто. Вид полетного экрана настраивается с помощью механизма Drag and Drop (перетащи и брось). Просто перетаскивайте нужные параметры на полетный экран и сразу смотрите, как это будет выглядеть. Файлы конфигурации позволяю легко перемещать Vector между моделями без необходимости заново все перенастраивать. В программе Вы найдете вкладки визуализации GPS, менеджера пользовательских путевых точек (не переживайте, как и в старой версии, это всего лишь значения координат, сохраненные в памяти и не имеющие никакого отношения к навигационным функциям), и много другое для удобной настройки всех возможностей Vector. Запись данных и телеметрии в лог Конечно, Vector может сохранять данные со всех датчиков и параметры GPS во внутреннюю память, и наше программное обеспечение позволяет отображать эти данные, строить графики и сохранять их на ПК. Поддерживается запись как постоянно изменяемых данных, так и пороговых значений. Vector встраивает в видеосигнал телеметрию для наземной станции EagleEyes. Кроме того, Vector оснащен портом UART, совместимым с передатчиками телеметрии и другим оборудованием на открытом исходном коде. В будущем мы планируем использовать интерфейс UART для различных функций телеметрии.
| комплект | 14957,67 | ||||||||||||||||||||||||||||||
| CAB-Y-1 | Eagle Tree Systems Y Cable [CAB-Y-1] | Y-Cable for the R/C Data Recorder and MicroPower eLogger from EagleTree Systems.. FEATURES: Y-cable with one male connector on one end and the other end has INCLUDES: One y-cable for the R/C Data Recorder and Micropower eLogger REQUIRES: Data Recorder or MicroPower eLogger | комплект | 477,03 | ||||||||||||||||||||||||||||||
| EMX-FC-1657 | EMAX Skyline F3 Acro Flight Controller (EMX-FC-1657) | Полетный контроллер EMAX Skyline F3 Acro (EMX-FC-1657)EMAX Skyline F3 Acro (EMX-FC-1657) – один из самых скоростных, производительных и самых популярных полетных контроллеров для Drone Racing. Skyline F3 – это совершенно новый уровень возможностей для вашего дрона. Это новый мозг вашего летательного аппарата, трикоптера, квадрокоптера, гексакоптера, октокоптера, самолета или боевого крыла, полетный контроллер Skyline F3 самое лучшее решение на сегодняшний день. Современный, шустрый процессор STM32F303 от STMicroelectronics, гарантирует вашему дрону максимальную точность полета, органично ускорит реактивность управления, улучшит взаимодействие полетного контроллера с регуляторами оборотов, что в свою очередь повысит эффективность работы регуляторов и двигателей на протоколах PWM, Oneshot, Oneshot125, Multishot и др.Преимущества полетного контроллера EMAX Skyline F3 Acro (EMX-FC-1657) Хороший доступ к разъемам и контактным площадкам - высокая практичность эксплуатации Разные варианты подключения – разъемы, пайка контактной группы, штыревые разъемы Модульность – удобное подключение к плате питания и OSD Компактность – 35 х 35 мм и вес до 6 г Для профессионалов – учтены все необходимые параметры для гонок и фристайла 8 PWM выходов 8 PWM входов 36 разъемов ввода/вывода 72 МГц тактовая частота 3 встроенных, последовательных порта Память-флеш на 64 Мб 
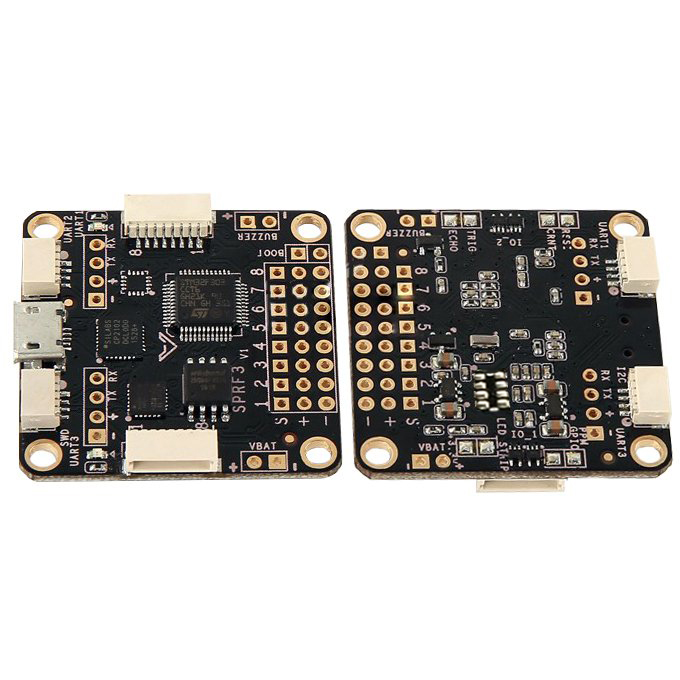 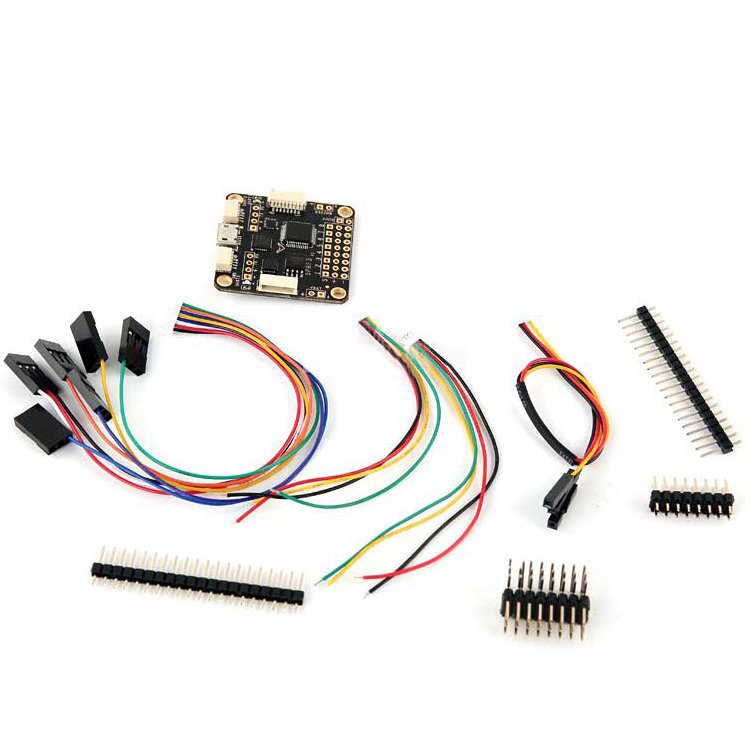
 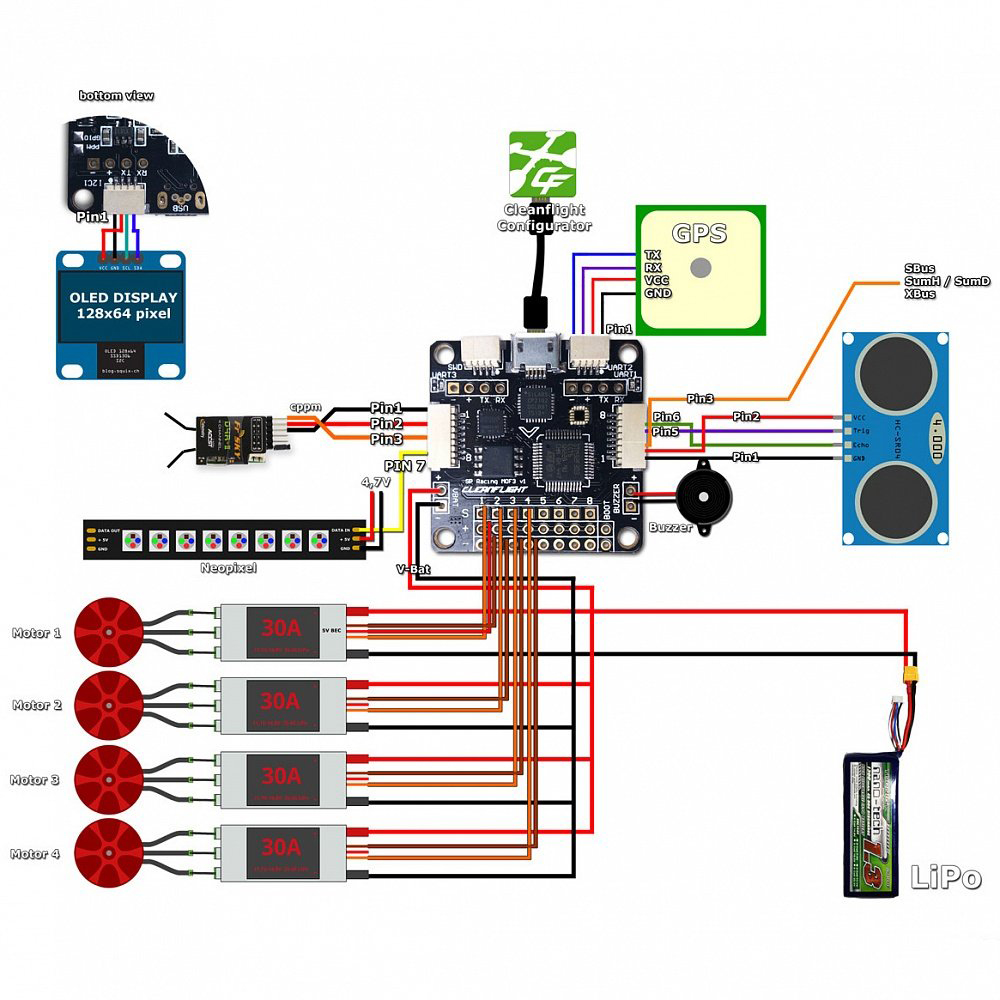
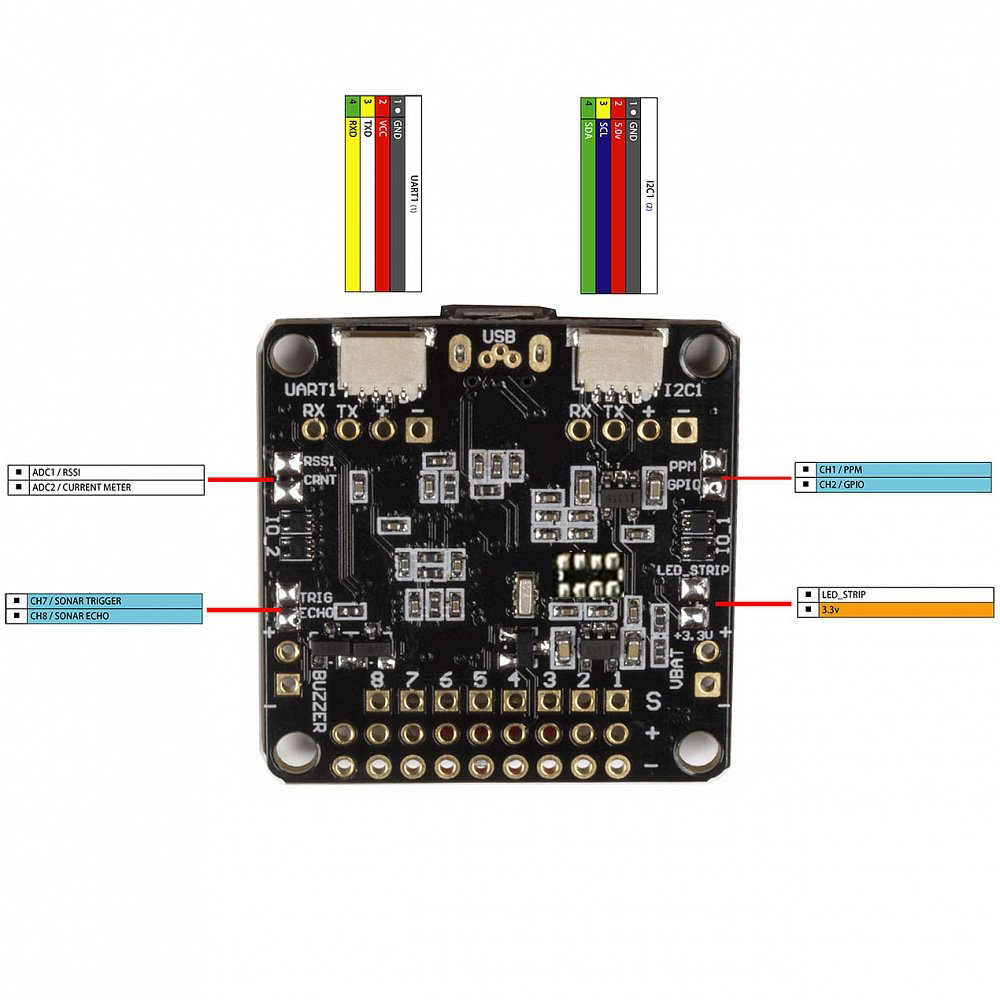 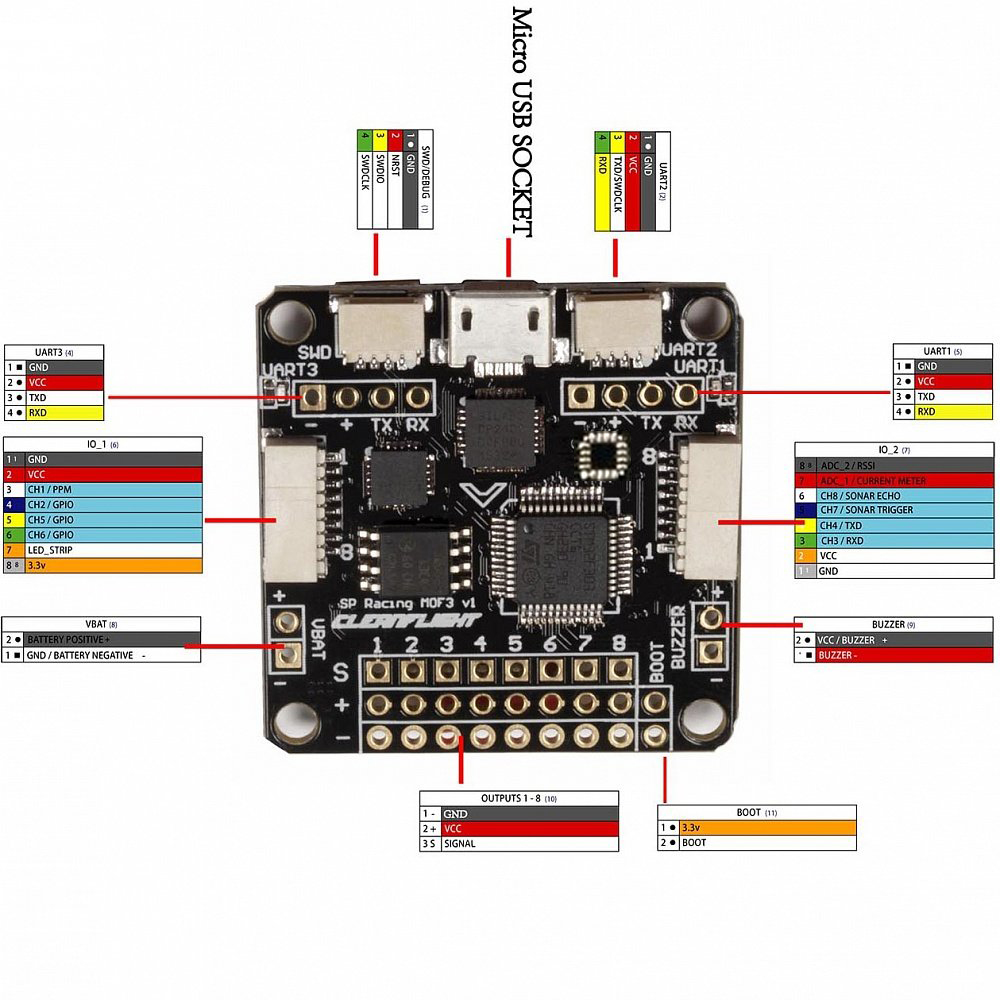
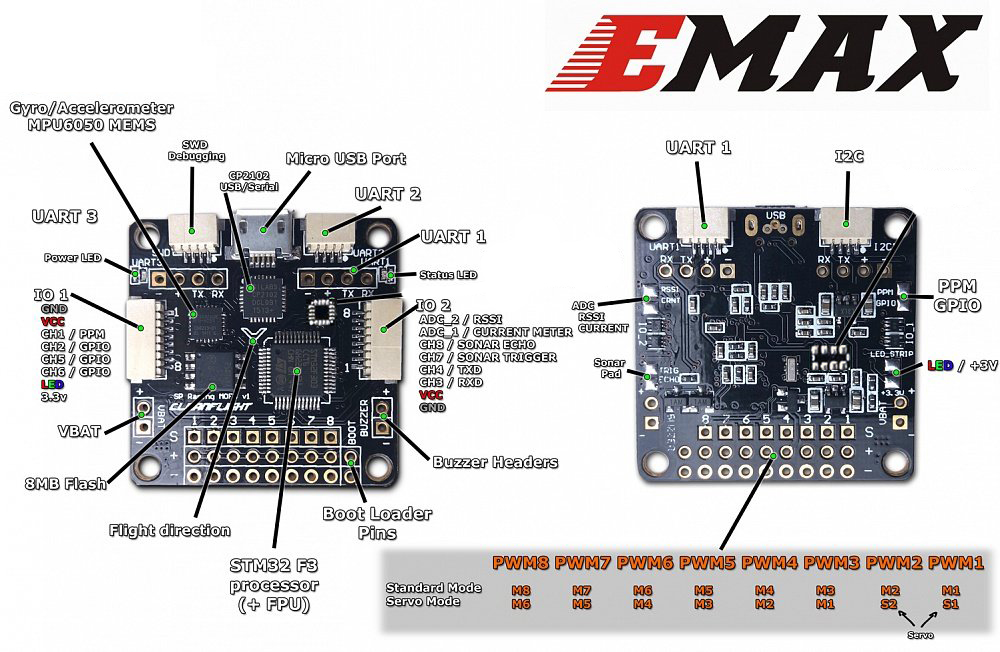 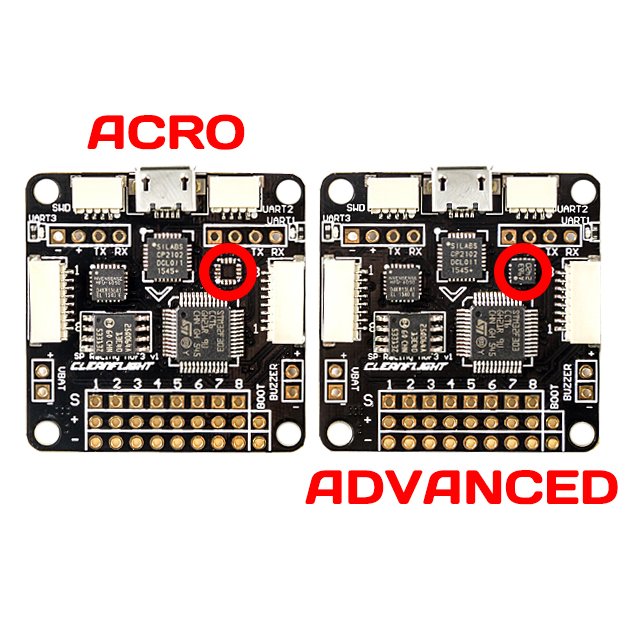 Спецификация контроллера EMAX Skyline F3 Acro (EMX-FC-1657) Аппаратная часть контроллера, а также его программное обеспечение было разработано лидерами индустрии, на продвинутом конфигураторе Cleanflight, при этом были учтены все недостатки предыдущего поколения контроллеров на чипе STM32F1. В основу разработки были положены все распространенные замечания и рекомендации пользователей, разработчиков и продвинутых пилотов Drone Racing. Компактные, симметричные размеры контроллера 35 x 35 мм с 4-мя монтажными отверстиями диаметром 3 мм Вес ~ 6 г Скоростной центральный процессор STM32F303 с тактовой частотой 72 МГц FPU Скоростная флеш-память большого объема Высококачественный гироскоп/акселерометр на базе чипа MPU6050 Разъем Micro USB для быстрого подключения к компьютеру 2 разъема x 8 pin JST-SH (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND) 8 контактных площадок для пайки 3 pin разъемов ESC/Servo connections 2 контактных площадки для пайки 4 pin разъемов для 2-х последовательных портов 1 контактная площадка для пайки 2 pin разъема для анализатора напряжения батареи 1 контактная площадка для пайки 2 pin разъема для пищалки-бузера 1 разъем x 4 pin JST-SH для подключения оборудования по шине I2C 1 разъем x 4 pin JST-SH для подключения отладки SWD Полетные характеристики EMAX Skyline F3 Acro (EMX-FC-1657) EMAX Skyline F3 построен, на испытательных технологиях и алгоритмах, которые помогут вашему летательному аппарату лететь максимально стабильно, как по рельсам!)) Никаких ограничений в использовании ресурсов, вы можете подключать OSD + Smart Port + SBus + GPS + LED Strip + мониторинг напряжения + Сонар + 8 моторов – все это можно подключать одновременно! Контроллер Skyline F3 ориентирован на конфигуратор Cleanflight, который может быть установлен на любой компьютер, используя кросс-платформу GUI (Windows/OSX/Linux). На контроллере установлен бортовой регистратор полетных данных «Черных ящик» - оптимизируйте настройки вашего контроллера и оцените результат без каких-либо догадок, все данные будут зафиксированы и доступны для анализа. Skyline F3 контроллер на процессоре нового поколения ARM Cortex-M4 72 мГц CPU с математическим сопроцессором (FPU) для эффективных расчетов полетных данных, получите больший результат за меньшее время! Скорость обмена данными более чем в 2 раза больше, по сравнению с предыдущими контроллерами на основе STM32F1. Дружественный интерфейс для разработчиков, через порт отладки SWD, выбор режимов загрузки контроллера, неубиваемый загрузчик. Полная поддержка OneShot ESC для более эффективной настройки ПИД-ов и повышения реакции двигателей. Поддержка подключения большинства, самых распространенных RC приемников SBus, SumH, SumD, Spektrum 1024/2048, XBus, PPM, PWM. Не требует никаких внешних инвертеров. Специальных выход для программирования LED подсветки – улучшенная ориентация, гонки и ночные полеты. Мониторинг напряжения и тока аккумуляторов. Поддержка подключения сонара для точного удержания позиции на малой высоте. Порт I2C для подключения внешних сенсоров или экрана OLED. Порт для пищалки-бузера. | комплект | 851,41 | ||||||||||||||||||||||||||||||
| EMX-AC-1687 | EMAX Skyline F3 Advanced Flight Controller (EMX-AC-1687) | Полетный контроллер EMAX Skyline F3 Advanced (EMX-AC-1687)EMAX Skyline F3 Advanced (EMX-AC-1687) – один из самых скоростных, производительных и самых популярных полетных контроллеров для Drone Racing. Skyline F3 – это совершенно новый уровень возможностей для вашего дрона. Это новый мозг вашего летательного аппарата, трикоптера, квадрокоптера, гексакоптера, октокоптера, самолета или боевого крыла, полетный контроллер Skyline F3 самое лучшее решение на сегодняшний день. Современный, шустрый процессор STM32F303 от STMicroelectronics, гарантирует вашему дрону максимальную точность полета, органично ускорит реактивность управления, улучшит взаимодействие полетного контроллера с регуляторами оборотов, что в свою очередь повысит эффективность работы регуляторов и двигателей на протоколах PWM, Oneshot, Oneshot125, Multishot и др.Преимущества полетного контроллера EMAX Skyline F3 Advanced (EMX-AC-1687) Хороший доступ к разъемам и контактным площадкам - высокая практичность эксплуатации Разные варианты подключения – разъемы, пайка контактной группы, штыревые разъемы Модульность – удобное подключение к плате питания и OSD Компактность – 35 х 35 мм и вес до 6 г Для профессионалов – учтены все необходимые параметры для гонок и фристайла 8 PWM выходов 8 PWM входов 36 разъемов ввода/вывода 72 МГц тактовая частота 3 встроенных, последовательных порта Память-флеш на 64 Мб 
 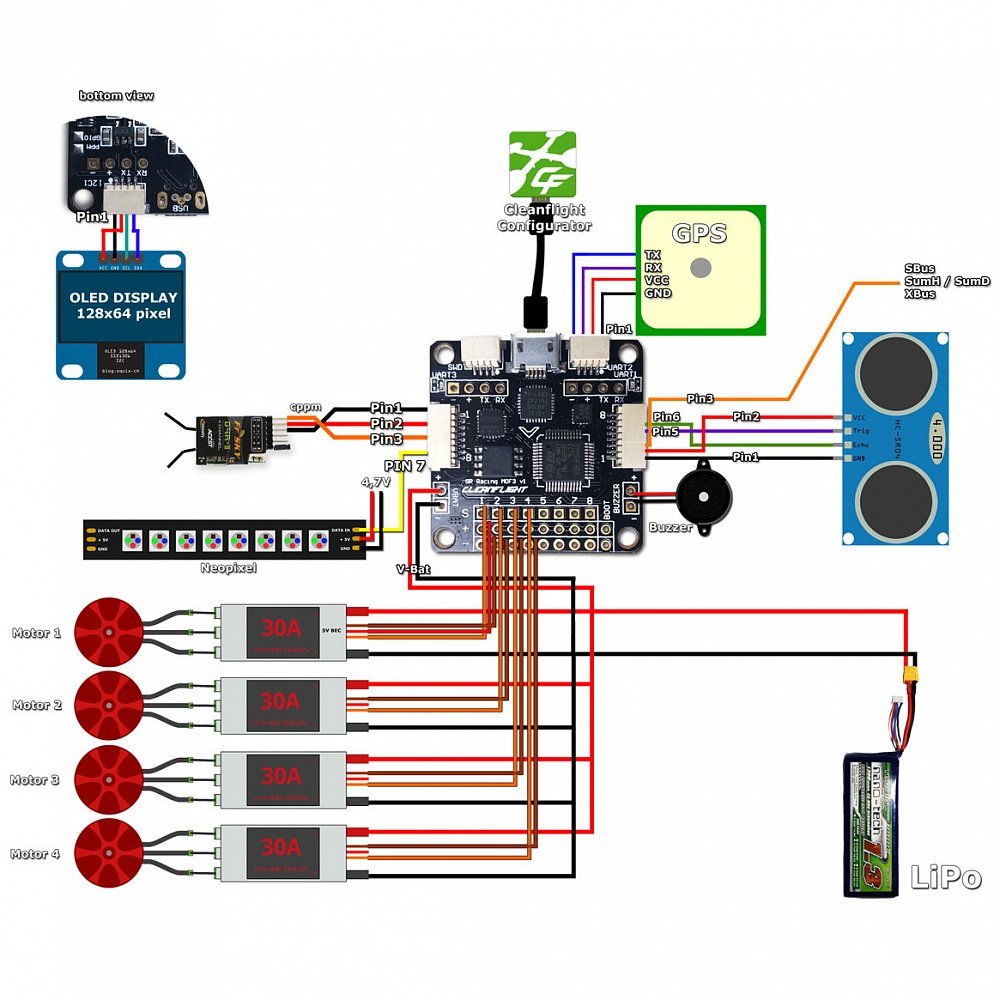
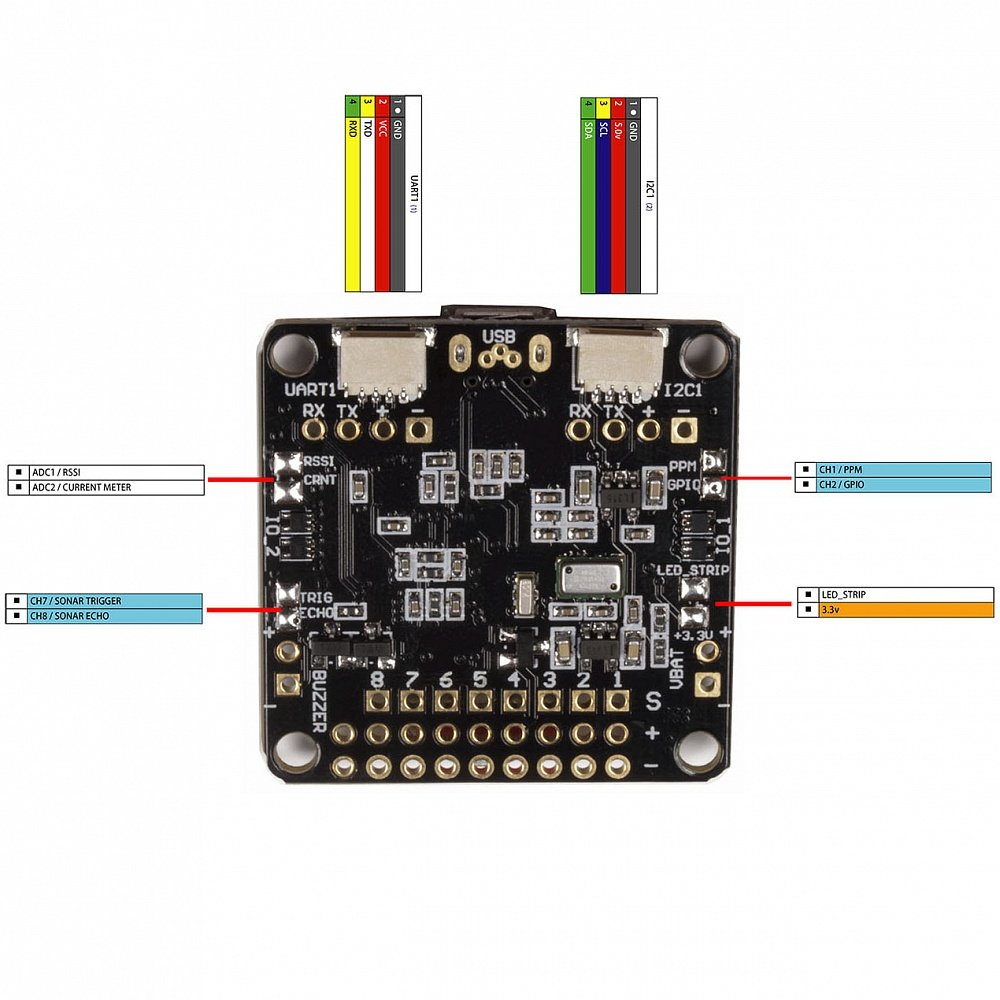 
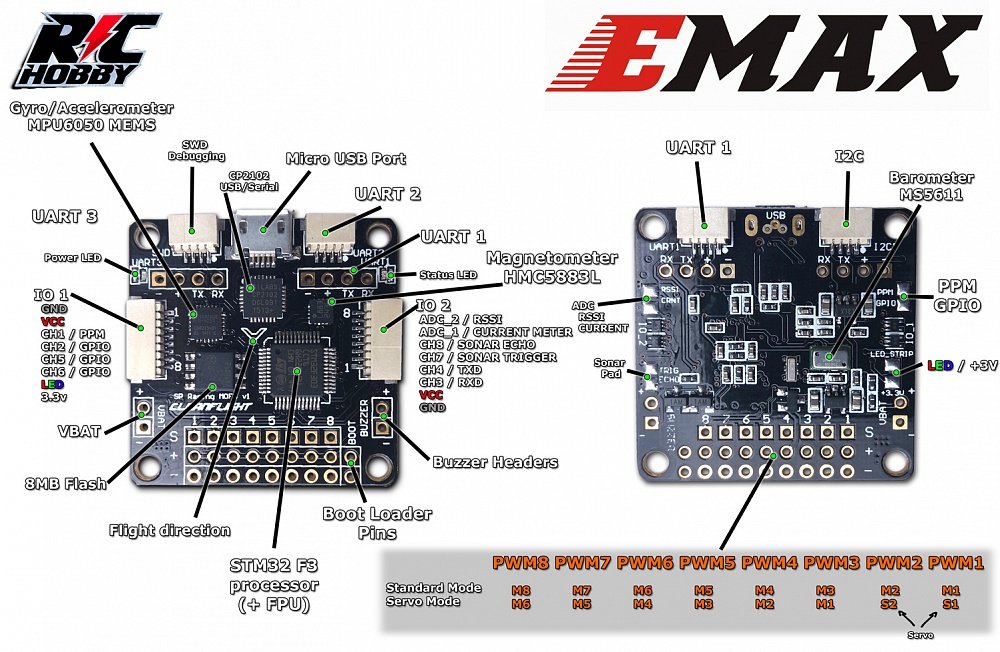 Спецификация контроллера EMAX Skyline F3 Advanced (EMX-AC-1687) Аппаратная часть контроллера, а также его программное обеспечение было разработано лидерами индустрии, на продвинутом конфигураторе Cleanflight, при этом были учтены все недостатки предыдущего поколения контроллеров на чипе STM32F1. В основу разработки были положены все распространенные замечания и рекомендации пользователей, разработчиков и продвинутых пилотов Drone Racing. Компактные, симметричные размеры контроллера 35 x 35 мм с 4-мя монтажными отверстиями диаметром 3 мм Вес ~ 6 г Компас и Барометр уже установлены на плате контроллера Скоростной центральный процессор STM32F303 с тактовой частотой 72 МГц FPU Скоростная флеш-память большого объема Высококачественный гироскоп/акселерометр на базе чипа MPU6050 Разъем Micro USB для быстрого подключения к компьютеру 2 разъема x 8 pin JST-SH (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND) 8 контактных площадок для пайки 3 pin разъемов ESC/Servo connections 2 контактных площадки для пайки 4 pin разъемов для 2-х последовательных портов 1 контактная площадка для пайки 2 pin разъема для анализатора напряжения батареи 1 контактная площадка для пайки 2 pin разъема для пищалки-бузера 1 разъем x 4 pin JST-SH для подключения оборудования по шине I2C 1 разъем x 4 pin JST-SH для подключения отладки SWD Полетные характеристики EMAX Skyline F3 Advanced (EMX-AC-1687) EMAX Skyline F3 построен, на испытательных технологиях и алгоритмах, которые помогут вашему летательному аппарату лететь максимально стабильно, как по рельсам!)) Никаких ограничений в использовании ресурсов, вы можете подключать OSD + Smart Port + SBus + GPS + LED Strip + мониторинг напряжения + Сонар + 8 моторов – все это можно подключать одновременно! Контроллер Skyline F3 ориентирован на конфигуратор Cleanflight, который может быть установлен на любой компьютер, используя кросс-платформу GUI (Windows/OSX/Linux). На контроллере установлен бортовой регистратор полетных данных «Черных ящик» - оптимизируйте настройки вашего контроллера и оцените результат без каких-либо догадок, все данные будут зафиксированы и доступны для анализа. Skyline F3 контроллер на процессоре нового поколения ARM Cortex-M4 72 мГц CPU с математическим сопроцессором (FPU) для эффективных расчетов полетных данных, получите больший результат за меньшее время! Скорость обмена данными более чем в 2 раза больше, по сравнению с предыдущими контроллерами на основе STM32F1. Дружественный интерфейс для разработчиков, через порт отладки SWD, выбор режимов загрузки контроллера, неубиваемый загрузчик. Полная поддержка OneShot ESC для более эффективной настройки ПИД-ов и повышения реакции двигателей. Поддержка подключения большинства, самых распространенных RC приемников SBus, SumH, SumD, Spektrum 1024/2048, XBus, PPM, PWM. Не требует никаких внешних инвертеров. Специальных выход для программирования LED подсветки – улучшенная ориентация, гонки и ночные полеты. Мониторинг напряжения и тока аккумуляторов. Поддержка подключения сонара для точного удержания позиции на малой высоте. Порт I2C для подключения внешних сенсоров или экрана OLED. Порт для пищалки-бузера. | комплект | 1016,08 | ||||||||||||||||||||||||||||||
| EMX-AC-1543 | EMAX Skyline32 Acro V1.1 Flight Controller (EMX-AC-1543) | Полетный контроллер EMAX Skyline32 Acro V1.1 (EMX-AC-1543) для мини-коптераThe skyline32 runs the open-source Cleanflight flight control (FC) software which has an ever-growing community of friendly developers and users. Being open-source means that you too can contribute to the system.Selling points: Cleanflight & Baseflight supported. (SKYLINE32 is loaded with Baseflight-Configurator) Unique wire-to-board connectors, wiring easier! Thin and light design, reducing overall weight saving mounting space! With compass sensor, no deviation! Black box included Adapting high quality electronic components & high precision SMT. Features 32-bit ARM micro processor running at 3.3V / 72MHZ. With gyro, compass, extended reservation position for accelerometer, barometer. Manual mode, Angle mode, Horizon mode Support Quad-,Tri-,Hex- ,various multirotors. Flexible RC input: standard, CPPM (PPM SUM) Battery voltage monitoring and low alarm. Micro-USB: Flashing firmware & adjusting parameter Parameters adjustment interface: Baseflight-Configuration. GPS position hold / “Go home” function(GPS Optional). Specification: Dimension: 35mm x 35 mm x 5 mm (30.5mm Mounting) Weight: 4.8g (W/O wires) Included: 1x SKYLINE32 Acro V1.1 2x RC breakout cable Note: SKYLINE32 hardware is compatible with NAZE32 firmware, including cleanflight, baseflight. Below are the links to the source codes: https://github.com/cleanflight/cleanflight https://github.com/multiwii/baseflight SKYLINE32 is loaded with baseflight and Baseflight-Configurator GUI. This manual is a baseflight Setup Tuning Guide for SKYLINE32. If you are using cleanflight firmware, please refer to the below link to download and install cleanflight Configurator: https://chrome.google.com/webstore/search/cleanflight?utm_source=chrome-ntp-icon Note: with firmware and configuration based on “MultiWii” software, the processor used is not Atmel AVR, and can not be compiled via Arduino or other AVR tools. Below is some information about STM32 development: http://code.google.com/p/afrodevices/wiki/STM32Development | комплект | 988,84 | ||||||||||||||||||||||||||||||
| EMX-AC-1637 | EMAX Skyline32 Advanced V1.1 Flight Controller (EMX-AC-1637) | Полетный контроллер EMAX Skyline32 Advanced V1.1 (EMX-AC-1637) для мини-коптераThe skyline32 runs the open-source Cleanflight flight control (FC) software which has an ever-growing community of friendly developers and users. Being open-source means that you too can contribute to the system.Selling points: Cleanflight & Baseflight supported. (SKYLINE32 is loaded with Baseflight-Configurator) Unique wire-to-board connectors, wiring easier! Thin and light design, reducing overall weight saving mounting space! With compass sensor, no deviation! Black box included Adapting high quality electronic components & high precision SMT. Features 32-bit ARM micro processor running at 3.3V / 72MHZ. With gyro, compass, extended reservation position for accelerometer, barometer. Manual mode, Angle mode, Horizon mode, heading hold mode, head-free mode, Altitude hold mode Support Quad-,Tri-,Hex- ,various multirotors. Flexible RC input: standard, CPPM (PPM SUM) Battery voltage monitoring and low alarm. Micro-USB: Flashing firmware & adjusting parameter Parameters adjustment interface: Baseflight-Configuration. GPS position hold / “Go home” function(GPS Optional). Specification: Dimension: 35mm x 35 mm x 5 mm (30.5mm Mounting) Weight: 4.8g (W/O wires) Included: 1x SKYLINE32 Acro V1.1 2x RC breakout cable Note: SKYLINE32 hardware is compatible with NAZE32 firmware, including cleanflight, baseflight. Below are the links to the source codes: https://github.com/cleanflight/cleanflight https://github.com/multiwii/baseflight SKYLINE32 is loaded with baseflight and Baseflight-Configurator GUI. This manual is a baseflight Setup Tuning Guide for SKYLINE32. If you are using cleanflight firmware, please refer to the below link to download and install cleanflight Configurator: https://chrome.google.com/webstore/search/cleanflight?utm_source=chrome-ntp-icon Note: with firmware and configuration based on “MultiWii” software, the processor used is not Atmel AVR, and can not be compiled via Arduino or other AVR tools. Below is some information about STM32 development: http://code.google.com/p/afrodevices/wiki/STM32Development | комплект | 1491,64 | ||||||||||||||||||||||||||||||
| EMX-AC-1685 | EMAX Skyline32 OSD Acro Flight Controller (EMX-AC-1685) | Полетный контроллер EMAX Skyline32 OSD Acro (EMX-AC-1685) для мини-коптераСочетает в себе полетный контроллер Naze32 6DOF и MinimOSDDescription: Skyline 32 Flight Controller + on board OSD to simplify your FPV build. No need for unreliable external OSD modules anymore. With a simple flick of a switch, the OSD can easily and quickly be turned ON or OFF. The OSD is integrated into the Flight Controller so setting up is simple. Connect an fpv camera and Video Tx directly to the Skyline 32 + OSD board. With MW_OSD pre installed on the Skyline32+OSD, the pilot can change PID on the spot through OSD without having to connect to a computer. Simply use the transmitter’s stick commands and follow the OSD menu. Supports PPM signal via Channel 1 in RC_IN port (UART2), and supports SBUS signal via Channel 4 in RC_IN port (UART2). Key Features: Run Cleanflight, Betaflight, or Baseflight Wire-to-Board micro connectors. Built-in gyro/accelerometer Blackbox ready with 2MB of storable data. Thin and ultra compact for clean/tight builds. Uses top quality electronic components and high precision SMT. 32-bit ARM micro processor running at 3.3v / 72MHz. Fly in Manual Mode, Angle Mode, Horizon Mode (Acro version). Supports Quad-,Tri-,Hex, Octo-, various multirotors. Flexible RC Input: PPM, Non-Inverted SBUS, PWM. Flash to latest firmware through the Micro-USB (**NOTE: Please be sure to leave OSD switch OFF when using Micro-USB). GPS Hold / Return-To-Home Feature supported (GPS module needed). 
 
 Specification: Dimension: 35mm x 35 mm x 5 mm (30.5mm Mounting) Weight: 4.8g (W/O wires) Included: 1x SKYLINE32 +OSD (Advanced) 2x RC breakout cable 1x vBat cable 1x buzzer cable 2x UART cables 4x Nylon Standoffs and nuts 1x Header Pin Assortment (Straight and 90 Degree) Note: SKYLINE32+OSD hardware is compatible with NAZE32 firmware, including cleanflight, baseflight. Below are the links to the source codes: https://github.com/cleanflight/cleanflight https://github.com/multiwii/baseflight SKYLINE32+OSD is loaded with baseflight and Baseflight-Configurator GUI. This manual is a baseflight Setup Tuning Guide for SKYLINE32. If you are using cleanflight firmware, please refer to the below link to download and install cleanflight Configurator: https://chrome.google.com/webstore/search/cleanflight?utm_source=chrome-ntp-icon Note: with firmware and configuration based on “MultiWii” software, the processor used is not Atmel AVR, and can not be compiled via Arduino or other AVR tools. Below is some information about STM32 development: http://code.google.com/p/afrodevices/wiki/STM32Development User Manual : http://yinyanmodel.com/Skyline32%20FC%20User%20Manual%20V1.3.pdf | комплект | 1659,24 | ||||||||||||||||||||||||||||||
| EMX-AC-1686 | EMAX Skyline32 OSD Advanced Flight Controller (EMX-AC-1686) | Полетный контроллер EMAX Skyline32 OSD Advanced (EMX-AC-1686) для мини-коптераСочетает в себе полетный контроллер Naze32 10DOF с магитным компасом, барометром и MinimOSDDescription: Skyline 32 Flight Controller + on board OSD to simplify your FPV build. No need for unreliable external OSD modules anymore. With a simple flick of a switch, the OSD can easily and quickly be turned ON or OFF. The OSD is integrated into the Flight Controller so setting up is simple. Connect an fpv camera and Video Tx directly to the Skyline 32 + OSD board. With MW_OSD pre installed on the Skyline32+OSD, the pilot can change PID on the spot through OSD without having to connect to a computer. Simply use the transmitter’s stick commands and follow the OSD menu. Supports PPM signal via Channel 1 in RC_IN port (UART2), and supports SBUS signal via Channel 4 in RC_IN port (UART2). Key Features: Run Cleanflight, Betaflight, or Baseflight Wire-to-Board micro connectors. Built-in gyro/accelerometer (Advanced Version also includes barometer and magnetometer) Blackbox ready with 2MB of storable data. Thin and ultra compact for clean/tight builds. Uses top quality electronic components and high precision SMT. 32-bit ARM micro processor running at 3.3v / 72MHz. Fly in Manual Mode, Angle Mode, Horizon Mode, Head-Holding Mode, Head-free Mode, and Altitude-Hold Mode (Advanced version). Supports Quad-,Tri-,Hex, Octo-, various multirotors. Flexible RC Input: PPM, Non-Inverted SBUS, PWM. Flash to latest firmware through the Micro-USB (**NOTE: Please be sure to leave OSD switch OFF when using Micro-USB). GPS Hold / Return-To-Home Feature supported (GPS module needed). 
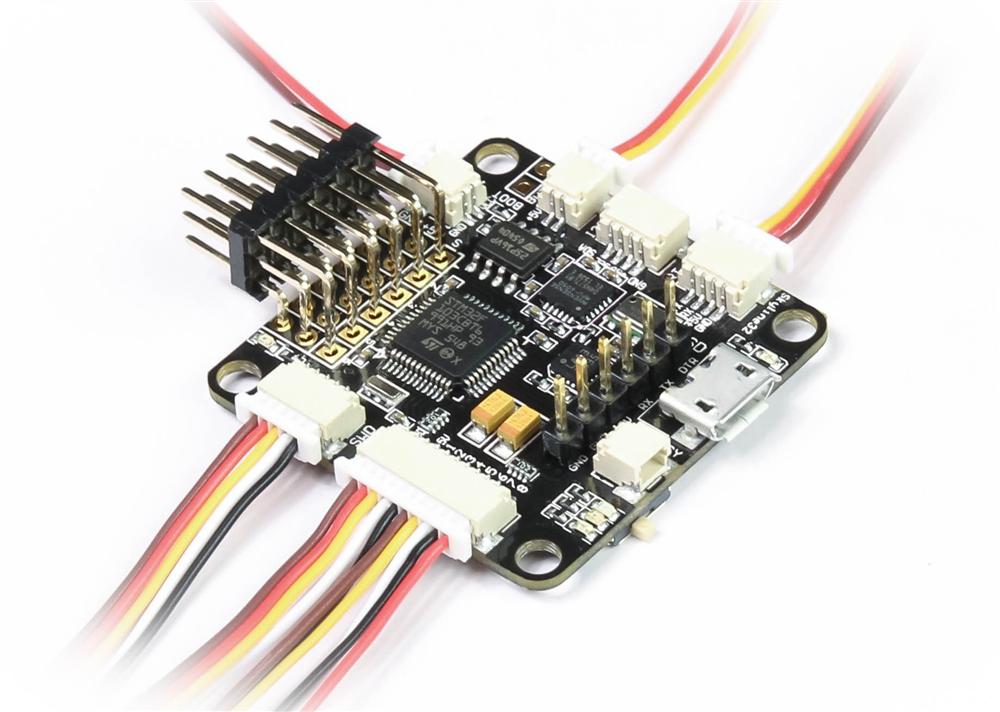 
 Specification: Dimension: 35mm x 35 mm x 5 mm (30.5mm Mounting) Weight: 4.8g (W/O wires) Included: 1x SKYLINE32 +OSD (Advanced) 2x RC breakout cable 1x vBat cable 1x buzzer cable 2x UART cables 4x Nylon Standoffs and nuts 1x Header Pin Assortment (Straight and 90 Degree) Note: SKYLINE32+OSD hardware is compatible with NAZE32 firmware, including cleanflight, baseflight. Below are the links to the source codes: https://github.com/cleanflight/cleanflight https://github.com/multiwii/baseflight SKYLINE32+OSD is loaded with baseflight and Baseflight-Configurator GUI. This manual is a baseflight Setup Tuning Guide for SKYLINE32. If you are using cleanflight firmware, please refer to the below link to download and install cleanflight Configurator: https://chrome.google.com/webstore/search/cleanflight?utm_source=chrome-ntp-icon Note: with firmware and configuration based on “MultiWii” software, the processor used is not Atmel AVR, and can not be compiled via Arduino or other AVR tools. Below is some information about STM32 development: http://code.google.com/p/afrodevices/wiki/STM32Development User Manual : http://yinyanmodel.com/Skyline32%20FC%20User%20Manual%20V1.3.pdf | комплект | 1994,44 | ||||||||||||||||||||||||||||||
| HK258000060 | ESC Connection Harness 100mm (32026) [258000060] | Разветвитель для подключения регуляторов оборотов на плату квадрокоптера, 100мм | комплект | 115,64 | ||||||||||||||||||||||||||||||
| SZZ-3991 | FC APM, KK, MWC Glass Fiber Shock Absorber Anti-vibration Set [SZZ-3991] | Площадка амортизирующая антивибрационная текстолитовая для полетных контроллеров APM 2.5, 2.6, KK, MWCХарактеристики:— Материал: стеклотекстолит — Размеры: 100 * 80 * 10мм — Масса: 24г — Цвет черный 2 * текстолитовые пластины 4 * силиконовые демпферы 2 * самоклейки 3M | комплект | 219,98 | ||||||||||||||||||||||||||||||
| HK015000042 | Female to Female Single Wire Jumper lead 25AWG 125mm (10pcs) [015000042] | Кабели соединители 125мм одиночные мама-мама для штыревых контактов типа servo/dupont, 10шт. | шт. | 79,61 | ||||||||||||||||||||||||||||||
| FFGPS-G2 | FFGPS-G2 M8N HMC5983 GPS Compass Module For DJI NAZA Flight Control [SKU236690/979718] | Модуль GPS+компас FFGPS-G2 M8N HMC5983 для полетных контроллеров DJI NAZA-M Description: - Item name: GPS Module - Usage: For DJI NAZA-M V2 or DJI NAZA-M LITE Flight Control System - Specially: FFGPS-G2 use M8N module, GPS and GLONASS Dual-mode module, so the number of satellites it found significantly more than the G1(SKU220122), the electronic compass useing temperature compensation HMC5983, automatic offset compensation. Used 32-bit microcontroller. - Cable length: 30CM, Using ultra-soft silicone line, fireproof.     Features: Diffenence between G1(SKU220122) and G2: Hardware configuration G2 is higher than G1 Number of satellites Search G2 is more than G1 G2 search satellites faster than the G1 Package included: 1 x HMC5983 GPS Module GPSmodule | шт. | 2713,03 | ||||||||||||||||||||||||||||||
| HK747000001-0 | Flip32 All In One (Pro) Flight Controller V1.03 [747000001-0/97834] | Полетный контроллер Flip32 Все В Одном (Pro) V1.03 для мини-коптераСочетает в себе полетный контроллер Flip32, MinimOSD, 5V 3A UBEC до 6S, 90A Датчик тока и напряжения, барометр, плата распределения питания - и все это на одной миниатюрной плате 35x35мм!** Эта версия поддерживает ТОЛЬКО сигнал SPPM или Serial RX, (для SBUS необходим внешний инвертер). The FLIP32 AIO (all-in-one) Pro Version flight controller includes a Flip32, MinimOSD, 5V 3A UBEC supporting up to 6S, 90A current sensor, a MS5611 barometer and PDB all on a 35x35mm PCB with 30x30mm mounting holes. This version of the Flip32 AIO uses improved components and design that will properly limit the voltage to the MinimOSD preventing voltage spike and damage to the OSD. Features: • STM103 MCU runs Cleanflight firmware • 8PWM output, supports Octocopter • MS5611 Barometer • Only 35x35mm, mount holes 30x30mm • Onboard USB (for config the OSD and FC) • 5V 3A UBEC (2-6S) • OSD hardware, Compatible with MinimOSD/MWOSD/CC3D OSD • Small PDB • Current and voltage sensors • Better OSD Chip used with less power consumption • 2x Software serial, 2x Hardware serial ports 

Specs: Dimensions: 35 x 35 mm (30 x 30mm mounting holes) Weight: 17g including wiring Includes: Flip 32 AIO Flight Controller Cables | комплект | 838,00 | ||||||||||||||||||||||||||||||
| SKU092302-blk | Folding GPS Antenna Metal Holder For Multicopter (black) [SKU092302-blk] | Складывающаяся стойка для приемника GPS (черная)Dimension:12cm x 10cm x 10cmMaterial: aluminum turning + CNC manufacturing GPSmodule | комплект | 299,17 | ||||||||||||||||||||||||||||||
| SKU092302 | Folding GPS Antenna Metal Holder For Multicopter (silver) [SKU092302/86774] | Складывающаяся стойка для приемника GPS (Серебристая)Dimension:12cm x 10cm x 10cmMaterial: aluminum turning + CNC manufacturing GPSmodule | комплект | 299,17 | ||||||||||||||||||||||||||||||
| SKU249572 | Folding GPS Mount Support Holder For Multicopter [SKU249572/983662] | Складывающаяся пластиковая стойка с фиксацией для приемника GPSSpecifications:- Материал: пластик + стержень стекловолокно - Color: Black - Height: 9/15cm - DJI,QAV 250 etc multicopter compatible - Weight: 8g GPSmodule | комплект | 276,54 | ||||||||||||||||||||||||||||||
| FT-Fold-GPS-Seat-b | Foxtech Foldable GPS Seat [FT-Fold-GPS-Seat-b] | Складывающаяся стойка для приемника GPS (Синяя)Foxtech Foldable GPS Seat is suitable for almost all of flight controller GPS, the foldable design for carry/store your multi-copter easier.GPS plate: Φ35mm Mounting plate: 40mmx40mm Full height: 150mm Weight: 20g Color: Anodized blue GPSmodule | комплект | 837,16 | ||||||||||||||||||||||||||||||
| HK009000003 | FTDI Adapter USB Controller - 5V [009000003] | USB-программатор FTDI для плат Arduino Mini и т.п.This board converts a USB connection into 5 volt TX and RX that you can connect straight to the Arduino Mini or other microcontrollers, allowing them to talk to the computer. It is based on the FT232RL chip from FTDI.Description: This is the newest revision of our FTDI Basic. We use a SMD 6-pin header on the bottom, which makes it smaller and more compact. Functionality has remained the same.  This is a basic breakout board for the FTDI FT232RL USB to serial IC. The pinout of this board matches the FTDI cable to work with official Arduino and cloned 5V Arduino boards. It can also be used for general serial applications. The major difference with this board is that it brings out the DTR pin as opposed to the RTS pin of the FTDI cable. The DTR pin allows an Arduino target to auto-reset when a new Sketch is downloaded. This is a really nice feature to have and allows a sketch to be downloaded without having to hit the reset button. This board will auto reset any Arduino board that has the reset pin brought out to a 6-pin connector.
This is a basic breakout board for the FTDI FT232RL USB to serial IC. The pinout of this board matches the FTDI cable to work with official Arduino and cloned 5V Arduino boards. It can also be used for general serial applications. The major difference with this board is that it brings out the DTR pin as opposed to the RTS pin of the FTDI cable. The DTR pin allows an Arduino target to auto-reset when a new Sketch is downloaded. This is a really nice feature to have and allows a sketch to be downloaded without having to hit the reset button. This board will auto reset any Arduino board that has the reset pin brought out to a 6-pin connector.The pins labeled BLK and GRN correspond to the colored wires on the FTDI cable. The black wire on the FTDI cable is GND, green is CTS. Use these BLK and GRN pins to align the FTDI basic board with your Arduino target. This board has TX and RX LEDs that make it a bit better to use over the FTDI cable. You can actually see serial traffic on the LEDs to verify if the board is working. For support and software visit http://arduino.cc/ | комплект | 497,56 | ||||||||||||||||||||||||||||||
| GAUI-210344 | GAUI GUEC GU-344 Quad Flyer Gyro (for 330X-S Series) [GAUI-210344] | Полетный контроллер для квадрокоптера - Gaui (GUEC GU-344) Quad Flyer 330x Gyro
Характеристики: | комплект | 9637,00 | ||||||||||||||||||||||||||||||
| GEN_ALTIOSD | GEN-ALTIOSD Gentvu Altiosd FPV OSD module | Главный модуль телеметрии AltiOSD. | шт | 2095,00 | ||||||||||||||||||||||||||||||
| GG-1802 | GG-1802 GPS GLONASS M8030-KT module UART TTL | Миниатюрный модуль GPS GLONASS GG-1802 UART TTLХарактеристики:GNSS CHIP M8030-KT frequency L1, 1575.42MHz,GLONASS L10F Bei Dou B1 SBAS L1 C/A:WASS, protocol NMEA 0183 v2.3,4.x GPS/QZSS L1 C/A,GLONASS L10F Bei Dou B1 SBAS L1 C/A:WASS, EGNOS,MSAS , Support Galileo E1B/C. Default GPS+GLONASS mode Default:GGA,GSA,GSV,RMC Support:VTG,GLL,TXT binary and NMEA Command Available baud rate (Default 9600) Can be set 1200,4800,19200,38400,57600,115200 bps Receiving channel 72 Sensitivity Tracking sensitivity: -160dBm Capture sensitivity:-157dBm Cold start 29s average Warm start time 28s average Hot start time 1s average Precision Horizontal Position: Autonomous <2.5maverage, SBAS < 2.0m average Velocity: 0.1 m/s Timepulse signal: RMS 30 ns maximum height 18000 Meter Maximum speed 515 m/s Maximum acceleration 4G Update frequency 1-10Hz (default 1Hz) A-GPS AssistNow on-line and off-line output level Output TTL level    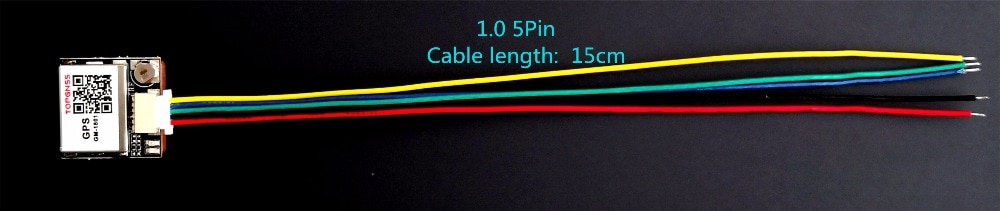 Physical characteristics PIN 6pin 1.0pitch VCC 3.3-5V.GND .TX.RX.PPS. Dimensions 18mm *18 mm * 8.2mm Operating Voltage 3.3V-5.0VDC ±5% weight 7.2g Connector form 1.0 6 PIN Cable length: 15 CM Operating temperature -40 to 85° C Storage temperature -40 to 85° C GPSmodule | шт. | 553,60 | ||||||||||||||||||||||||||||||
| GLB-93829 | GLB-93829 USB Download Programmer Debugger For AVR JTAG ICE Atmega AVR STUDIO | USB-программатор 10-pin AVR JTAG ICE Atmega AVR STUDIOОписание:— Программирует большинство AVR flash микроконтроллеров, которые поддерживают интерфейс JTAG ICE. — Работает с AVR Studio 4.12/4.14/4.16/4.17/4.18 (необходимо скачать) — Питание по USB. — Стандартный коннектор — PPTC Resettable Fuses for protecting . — работает в Windows 2000/xp /win7 Совместимые микроконтроллеры: — ATmega128, ATmega128L, ATmega16, ATmega162, ATmega162V, ATmega165, ATmega165V, ATmega169, ATmega169V, ATmega16L, ATmega32, ATmega323, ATmega323L, ATmega32L, ATmega64, ATmega64L........... | комплект | 844,70 | ||||||||||||||||||||||||||||||
| GLB-98595 | GLB-98595 Crius FTDI Basic Breakout USB-TTL 6 PIN 3.3 5V | USB-TTL интерфейс Crius FTDI для плат Arduino и пр. (5V / 3,3V)This is the newest revision of our FTDI BASIC. It now uses a SMD 6-pin header on the bottom, which makes it smaller and more compact. Functionality has remained the same. This is a basic breakout board for the FTDI FT232RL USB to serial IC. The pinout of this board matches the FTDI cable to work with official Arduino and cloned 5V Arduino boards. It can also be used for general serial applications. The major difference with this board is that it brings out the DTR pin as opposed to the RTS pin of the FTDI cable. The DTR pin allows an Arduino target to auto-reset when a new Sketch is downloaded. This is a really nice feature to have and allows a sketch to be downloaded without having to hit the reset button. This board will auto reset any Arduino board that has the reset pin brought out to a 6-pin connector. The pins labeled BLK and GRN correspond to the colored wires on the FTDI cable. The black wire on the FTDI cable is GND, green is CTS. Use these BLK and GRN pins to align the FTDI basic board with your Arduino target. This board has TX and RX LEDs that make it a bit better to use over the FTDI cable. You can actually see serial traffic on the LEDs to verify if the board is working. This board was designed to decrease the cost of Arduino development and increase ease of use (the auto-reset feature rocks!). Our Arduino Pro boards and LilyPads use this type of connector. One of the nice features of this board is a jumper on the back of the board that allows the board to be configured to either 3.3V or 5V (both power output and IO level). This board ship default to 5V, but you can cut the default trace and add a solder jumper if you need to switch to 3.3V. | шт. | 412,30 | ||||||||||||||||||||||||||||||
| GPS-GSM-S3-B | GPS GSM S3 Mini Tracker ZX303 w/battery 400mAh, 17g, 40*24*12mm | Мини GPS GSM треккер S3 на чипе ZX303 с аккумулятором 400мАч, для поиска авиамодели через 365GPS APPРазмеры: 40*24*12ммВес: 17 Автономность: до 4 дней в режиме ожидания, до 2 дней в режиме работы Совместимость с Sim-картами Nano-sim, GSM+GPRS 4-frequency System: 850/900/1800/1900MHz GPSmodule | шт. | 1154,87 | ||||||||||||||||||||||||||||||
| GPS-GSM-S7-B | GPS GSM S7 Mini Tracker ZX303 w/battery 1000mAh, 29g, 57*24*16mm | Мини GPS GSM треккер S7 на чипе ZX303 с аккумулятором 1000мАч, для поиска авиамодели через 365GPS APPРазмеры: 57*24*16ммВес: 29г Автономность: до 10 дней в режиме ожидания, до 5 дней в режиме работы Совместимость с Sim-картами Nano-sim, GSM+GPRS 4-frequency System: 850/900/1800/1900MHz GPSmodule | шт. | 1214,26 | ||||||||||||||||||||||||||||||
| GY-271-QMC5883 | GY-271 QMC5883 I2C 3-Axis Magnetometer Compass Module board | Датчик компас (магнетометр) QMC5883 цифровой i2c для полетных контроллеров (Ardupilot, Pixhawk, INAV...)*High quality immersion gold pcb machine welding processes, quality assurance*Name: QMC5883 module (three-axis magnetic field module) *Model: GY-271 *Chip: QMC5883 *Power supply: 3.3-5V *Means of communication: IIC communication protocol *Measuring range: ± 1.3-8 Gauss *chematics, manuals and reference documentation of relevant data 51, the AVR microcontroller test code 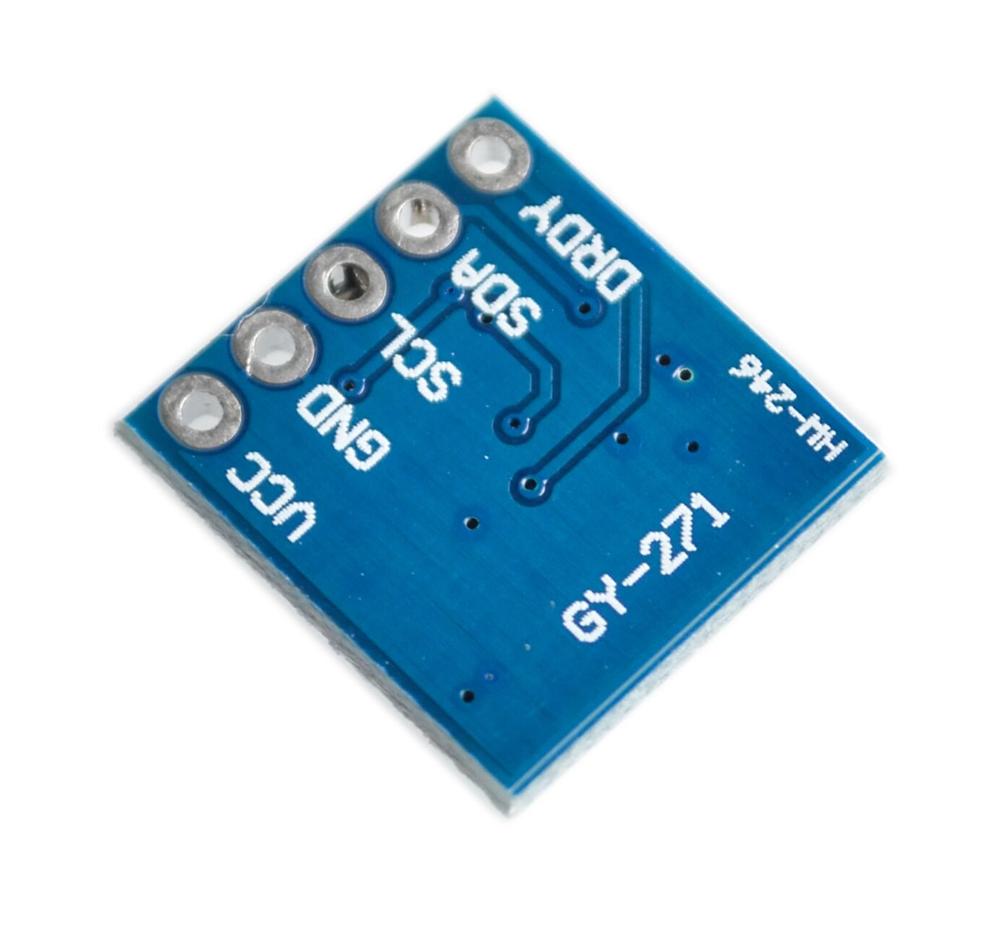 Package Includes Triple Axis Compass Pin header 5pin | шт. | 127,80 | ||||||||||||||||||||||||||||||
| GY-521 | GY-521 MPU-6050 Module 3 Axis Gyro+Accelerometer | Модуль GY521 с датчиком MPU-6050 с 3-осевым гироскопом и 3-осевым акселлерометромОсобенности:- Чип: MPU-6050 - Питание: 3V-5V - Диапазон гироскопа: +/- 250 500 1000 2000°/сек - Диапазон ускорения: ± 2 ± 4 ± 8 ± 16G - Communication mode: standard IIC communication protocol - Chip built-in 16bit AD converter, 16bit data output | шт. | 377,10 | ||||||||||||||||||||||||||||||
| BGID1352535 | Happymodel INAV F4 Deluxe Flight Controller Integrated OSD, w/Buzzer, GPS/Compass, Airspeed for RC A | Полетный контроллер Happymodel INAV F4 Deluxe, встроенный OSD, барометр, датчик тока, в комплекте с Buzzer, GPS/Compass, датчиком Airspeed для моделей самолетовSpecifications:Item Name: Inav F4 flight controller Input Voltage: 7.4V - 22.2V (2-6S Lipo) Dimension: 38x38x13mm Weight: 18g Application: Use INAV firmware can work with all kinds of RC Airplane 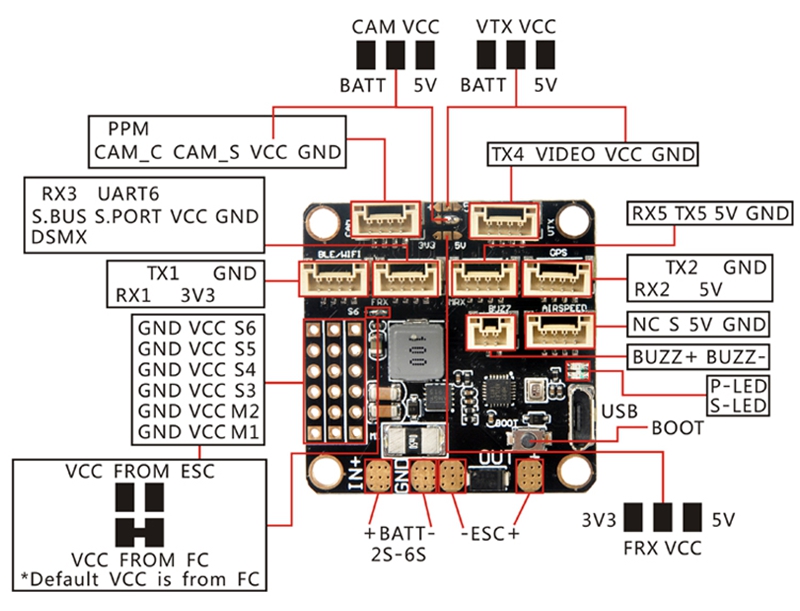 Features: Ultra High Performance MCU STM F4 Integrated Chip High Performance MPU-9250 Gyroscope & Accelerometer Incredibly Precise MPU-9250 Magnetometer Altitude Control Capability via Integrated BMP280 Barometer Anti Vibration via Integrated Silicone Soft Mount Dampers Powerful 120A Integrated PDB Integrated OSD Support up to 6 UARTs Built-in Buzzer port and AirSpeed port Integrated Driver Inverter for SBUS and S.PORT connections Built-in Battery Voltage and Current monitor Camera and VTX port built-in Peripheral pass Integrated 5V@3A BEC for small Digital servos, can be easily changed to External BEC for bigger Servos Can be easily changed to Camera Voltage and vtx Voltage Can be easily changed to RX Voltage Support INAV firmware Simplified & Ready with Plug & Play Functionality Deluxe Version Package Include: 1 x Inav F4 Flight controller 1 x CNC ALU Protect case 4 x 4Pin GH1.25 cables 1 x Buzzer 1 x GPS 1 x GPS Folding mounted holder 1 x Analog Airspeed sensor 1 x Pitot tube for Airspeed sensor | комплект | 3576,17 | ||||||||||||||||||||||||||||||
| HC-06_4pin | HC-06 Wireless Serial 4 Pin Bluetooth | Адаптер Bluetooth HC-06 4pin для полетных контроллеров Arduino/MultiWiiПозволяет настриивать полетные контроллеры Arduino/MultiWii при помощи Android-устройства через BluetoothНужно установить программу на Android | шт. | 766,77 | ||||||||||||||||||||||||||||||
| HX4-06022 | HEX HERE GPS/GNSS Module (M8N) [HX4-06022] | Модуль HERE GPS/GNSS (M8N) с компасомProduct DescriptionThis is the HERE GPS module, designed for use with the Pixhawk 2 flight controller The package contains: 1 x HERE GPS module with cable 1 x Foam adhesive mount Please note: * The Here GNSS (M8N) is an updated version that has a built-in Invensense ICM20948 compass IC instead of the EOL HMC5983, labelled HX406022. * The driver for ICM20948 as an external compass has recently been updated in the Ardupilot firmware, however, it is still in master release and is scheduled for official release in the soon-to-be-released Copter 3.5.4 firmware. Therefore, to use the external ICM20948 compass, you may have to use the master firmware for now. * The compass orientation has to be set to pitch180yaw90, to be aligned with the flight controller orientation. This can be easily configured in the same page as compass calibration. Not setting the correct compass orientation for external compass will result in wrong heading being detected and may result in undesirable flight behaviour. GPSmodule | комплект | 4252,85 | ||||||||||||||||||||||||||||||
| HX4-06033 | HEX HERE2 GPS/GNSS Module (M8N) [HX4-06033] | Модуль HERE2 GPS/GNSS (M8N) с компасом, барометром и IMU сенсоромThe Here 2 GPS module is a new version based on Here GNSS GPS unit. Compared with Here GNSS GPS unit, Here 2 GPS mudule features more accurate positioning, faster response, and colorful LED lights for visible indications of UAV status. Here 2 GPS Unit is compatible with Pixhawk2.1 and most of the other open source flight controllers.Description Here 2 GNSS for Pixhawk 2.1 Sensitivity: Tracking and Navigation-167dBm, Hot start- 148dBm, Cold start- 157dBm Active antenna and passive antenna 72-channel u-blox M8N engine GPS/QZSS L1C/A, GLONASSL10F BeiDou B11, etc. Navigation update rate: Max 10Hz Specifications Processor: STM32F302 Compass Gyro Accelerometer: ICM20948 Barometer: MS5611 Receive type: 72-channel u-blox M8N engine GPS/QZSS L1C/A, GLONASSL10F BeiDou B11, Galileo E1B/C SBAS L1 C/A: WAAS, EGNOS, MSAS, GAGAN Navigation update rate: Max 10Hz Positioning Accuracy: 3D FIX Time to first fix: Cold start 26S, Aided start 2S, Reacquisition 1S Sensitivity: Tracking and Navigation-167dBm, Hot start- 148dBm, Cold start- 157dBm Assisted GNSS: Assist Now GNSS Online, AssistNow GNSS Offline (up to 35 days), AssistNow Autonomous (up to 6 days) OMA SUPL& 3GPP compliant Oscillator: TCXO(NEO-M8N/Q) RTC Crystal: Built in ROM: Flash(NEO-M8N) Available Antennas: Active antenna and passive antenna Signal Integrity: Signature feature with SHA 256 Protocols and Interface UART+I2C/CAN: JST_GH Main interface, Switch Internally STM32 Main programming interface: JST_SUR Operating Condition Operating Temperature: -40 deg C to 85 deg C Dimensions 76mm x 76mm x 16.6mm Weight: 49g What's Included 1 x Here 2 GNSS for Pixhawk 2.1 GPSmodule | 7542,00 | |||||||||||||||||||||||||||||||
| HX4-06111 | HEX HERE3 GPS/GNSS Module (M8P) CAN interface [HX4-06111] | Модуль HERE3 GPS/GNSS (M8P) с компасом, барометром и IMU сенсором, только CAN интерфейс для Pixhawk2 и пр. Поддержка RTKThe Here3 GPS is a high precision GNSS system, which also supports RTK navigation mode, builtwith CAN protocolIt is also designed to be dust-proof and splash proof Equipped withSTM32F302 processor, the Here3 provides faster processing speed and better reliability. The Here3 has built-in sensors such as compass, gyroscope, accelerometer, and status LED. It runs on a Chibios real-time operation system. Its open source structure is ideally suited todevelopers who need specialized requirements on their navigation system. Feature 1. Cost efficient high precision and RTK supported GNSS chip (base station needed for RTK). Positioning accuracy down to centimetre-level in ideal environment. 2. Brand new design with improved visibility on signal LEDs. Better dust proof and waterrepellent design (No guarentee to be water proof under any situation due to complexity of operation environment). 3. High data rate, upgradeability, noise immunity, and real-time features benefited from CAN protocol 4. Equipped with STM32F302 high-performance processor in real-time operation system. Framework developed by Hex provides additional stabilities. Supports future firmware updates. 5. Supporting ground control station available. Easy update from Mission Planner. 6. Built-in a complete set of Inertial Measurement Unit (compass, gyroscope, and accelerometer), which satisfy advanced navigation needs. Specifications Receiver Type u-blox M8 high precision GNSS modules (M8P) Satellite Constellation GPS L1C/A GLONASS L10F BeiDou B11 Positioning Accuracy 3D FIX: 2.5m RTK: 0.025m Processor STM32F302 IMU sensor ICM20948 Navigation Update Rate 8Hz (Max) Communication Protocol CAN Operating Temperature -40°C to 85°C Dimension 76 X 76 X 16.6mm Weight 48.8g  Configuration. Paramters Setting Using Ardupilot Firmware: Connect the 4pin CAN cable connector to CAN1 or CAN2 port on flight controller. Turn on the flight controller and connect it to Mission Planner. Go to "Config/Tuning > FullParameter List" and modify the following paramters: CAN_D1_PROTOCOL: 1 CAN_D2_PROTOCOL: 1 CAN_P1_DRIVER: 1 CAN_P2_DRIVER: 1 GPS_TYPE: 9 NTF_LED_TYPES: 231 Click "Write Params" when done. CAN functions will be available after rebooting the flightcontroller. What's Included 1 x Here 3 GNSS for Pixhawk 2.1 GPSmodule | 8380,00 | |||||||||||||||||||||||||||||||
| HX4-06100 | HEX Pixhawk2.1 CUBE Orange H7 Standart Set + ADS-B [HX4-06100] | Полетный контроллер Pixhawk 2 Cube Orange SuiteIncludes:Pixhawk 2 Cube Orange Autopilot Pixhawk 2 ADS-B Carrier Board Power supply module Cable set 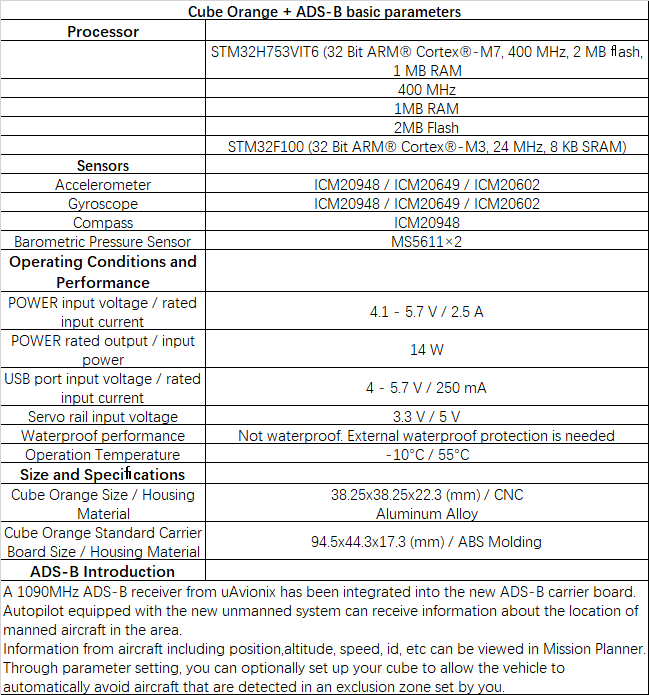 #FC #FC | комплект | 18855,00 | ||||||||||||||||||||||||||||||
| HX4-06057 | HEX Pixhawk2.1 Cube Standard Set & Here 2 GPS/GNSS Module [HX4-06057] | Полетный контроллер Pixhawk 2.1 Cube Standard Set & Here 2 GPS/GNSS Module [HX4-06057]PixHawk 2.1 main features:Single board, high performance integrated flight controller Increased reliability and reduced integration complexity Improved sensor performance Best ease-of-use in open-source world Enough I/O for any application Improved microcontroller resources The HERE2 GNSS which adds 10 DOF IMU, ProfiLED’s, along with future CANBUS capability. The HERE2 is the new standard in commercial navigation solutions. Compatible with ArduCopter, ArduPlane and ArduRover flight control software. Key design points All-in-one design with integrated FMU and lots of I/O ports Designed for easy mounting (no vibration isolation needed) Separate power supplies for FMU and IO with battery backup RTC clock Integration with standard power brick Voltage, Current and Fault Sensing Battery voltage and current reported by each of the two supported power bricks can be measured and logged by the FMU. In addition, the 5v unregulated supply rail can be measured, to detect brownouts and abnormal surges. I/O board sensor can measure the servo power rail voltage. Over-current conditions on the peripheral power ports can be detected, and hardware lock-out prevents damage in case of persistent short-circuits on these ports. The lockout can be reset by FMU software. The under/over voltage supervisor for FMU provides an output that is used to hold FMU in reset during brown-out events. Battery Backup Both the FMU and IO microcontrollers feature battery-backed real-time clocks and SRAM. The on-board backup battery has sufficient capacity to recovery from unintended power loss or other causes of in-air restarts. Pixhawk FMU Main Board STM32F427 168MHz Cortex-M4 microcontroller: 2MiB flash, 256KB RAM On-board 16KiB SPI FRAM MPU9250 / ICM 20xxx accelerometer and gyro MS5611 Barometer Micro SD interface Vibration Damped IMU board LSM303D integrated accelerometer / magnetometer L3GD20 gyro MPU9250 / ICM 20xxx accelerometer and gyro MS5611 Barometer I/O ports 14x PWM servo outputs (8x from IO, 6x from FMU) R/C inputs for CPPM, Spektrum / DSM and S-BUS Analogue / PWM RSSI input S-BUS servo output 5x general purpose serial ports (2x with full flow control) 2x I2C ports SPI port 2x CAN Bus interface 3x analog inputs High-powered piezo buzzer driver High-power I2C RGB LED port Safety switch with LED In the box 1x PixHawk 2.1 Cube 1x PixHawk 2.1 Carrier Board 1x Here 2 GNSS module 1x Mini Power Brick 1x SD Card 2x Telemetry Cable 1x Power Cable 1x I2C Cable 1x Buzzer Cable 1x MicroUSB Cable 1x GPS1 Cable (with safety switch) 1x GPS2 Cable 1x I2C Splitter 1x Mounting Screws (M2.5x8) 1x 3M Double Sided Foam Tape | комплект | 20740,50 | ||||||||||||||||||||||||||||||
| HX4-06001 | HEX Pixhawk2.1 Cube Suite Standard Edition [HX4-06001] | Полетный контроллер Pixhawk 2 Suite - Standard EditionIncludes:Pixhawk 2 Cube Autopilot Pixhawk 2 Carrier board Power supply module Cable set #FC | комплект | 14958,30 | ||||||||||||||||||||||||||||||
| HK387000042-0 | HKPilot Mega 2.5.2 Master Set With OSD, LEA-6H GPS, Power module, Telemetry Radio (433Mhz) (XT60) [3 | Полетный контроллер - HKPilot Mega 2.5.2 с модулем LEA-6H GPS, OSD, силовым модулем и радио-линком телеметрии 433MhzНабор HKPilot Mega, основанный на контроллере с открытым исходным кодом, в комплекте с радиомодемом, GPS, OSD, кабелями и корпусами для легкой установки в Ваш БПЛА.HKPilot основан на быстро развивающемся проекте Ardupilot Mega (АРМ). Это проект с открытым кодом от 3DR robotics. Этот полетный контроллер позволяет превратить практически любое транспортное средство (автомобиль, вертолет, лодка, мультикоптер) в полностью автономный аппарат, способный выполнять широкий круг задач, в том числе "полет по точкам" с помощью высокоточного модуля GPS Ublox LEA-6. Для этого контроллера доступно большое количество функций, в том числе возможность объединения с радиомодемом, что позволяет отправлять и обрабатывать данные на Вашем ПК или планшете. При подключении GPS появляется возможность отслеживать точное местоположение аппарата. В комплекте: HKPilot Мега 2.5.2, модуль GPS Ublox LEA-6H, наземный и полетные модули ридиотелеметрии, датчик тока и BEC, minim OSD v1.1 для наложения данных на видео, полный набор кабелей, а также защитные корпуса для контроллера, радиотелеметрии и GPS. Этот полетный контроллер считается одним из самых лучших в соотношении цена/качество. Кроме того, он постоянно совершенствуется и дорабатывается. Этот продукт основан на APM Project компании 3DR Robotics. Более полную информацию смотрите на сайте разработчика. Особенности: 
 
 
 Характеристики: Комплектация: | комплект | 10683,87 | ||||||||||||||||||||||||||||||
| HK387000051-0 | HKPilot Mega 2.7 Flight Controller USB/GYRO/ACC/MAG/BARO [387000051-0/56052] | Полетный контроллер HKPilot Mega 2.7 с USB/GYRO/ACC/MAG/BAROНовая ревизия платы HK PilotMega 2.7, довольно популярного автопилота базирующегося на проекте APM (Ardu Pilot Mega). Характерным для него является совместимость с открытым программным обеспечением 3drobotics.com. Не многие знают, но в течении развится проекта Ardupilot, на ревизии платы 2.5, возникали довольно злокачественные ошибки; все выявленные в ходе освоения АП ошибки нам удалось исправить в новой ревизии платы. HK PilotMega 2.7 нововведения: HKPilot Меgа 2.7 основан на проекте APM, получившего поддержку и открытый быстро развивающемся программный код от 3drobotics.com. Данный автопилот сможет автоматизировать множество летательных аппаратов, таких как: мультикоптеры всевозможных схем, классические вертолёты, самолеты схем: классика, летающее крыло Прим переводчика ( есть начальные алгоритмы позволяющие управлять конвертопланом, или планером: с возможностью автономного обрабатывания высходящих потоков), помимо этого плата может управлять автомобилями и лодками. Благодаря мощнейшим программным инструментам (Mission Planner, APM planner) работающим под руководством систем Windows, Linux, Mak а ещё и различных планшетов и смартфонов, через протокол mavlink получаем обширные возможности программирования платы, возможность просматривать записи бортового журнала, вплоть до построения трека полёта в google Earth. Особенности: • решена проблема «bad gyro health» выпрямлением и стабилизации напряжения до 3.3 В. Технические характеристики: Размеры: 44×70×15mm (с корпусом) | комплект | 4838,72 | ||||||||||||||||||||||||||||||
| HK9387000016 | HKPilot Mega V2.5 Flight Controller USB/GYRO/ACC/MAG/BARO [9387000016/37328] | Полетный контроллер - HKPilot Mega 2.5.2 USB/GYRO/ACC/MAG/BAROHKPilot Mega 2.5 это современный универсальный автопилот, основанный на открытом проекте АрдуПилотМега 3D Robotic APM. Его универсальность заключается в том, что он позволяет использовать его для управления разнообразными моделями самолетов, классических вертолетов, мультироторных систем, а также автомобилей!Плата стабилизации и управления HKPilot Mega 2.5 оснащена самыми лучшими на сегодняшний день датчиками. В отличии от простых устройств стабилизации, этот автопилот поддерживает запрограммированные Вами миссии автономного полета аппарата по заданным точкам в системе GPS, а также обеспечивает самостоятельный взлет и посадку. Это позволяет эффективно использовать его не только в развлекательных целях, но и для выполнения миссий в профессиональных проектах! Особенности: • Arduino совместимый • Полностью собранный и проверенный • 3 осевой гироскоп, акселерометр, магнитометр и высокоэффективный барометр • Бортовой 16 Mbit Dataflash чип для автоматической регистрации полетных данных • Цифровой компас HMC5883L • 6 осевой Акселерометр/гироскоп MPU-6000 • Датчик атмосферного давления MS5611-01BA03. • Два микроконтроллера ATMEGA2560 и ATMEGA32U-2 (обработка и функция USB). • Связь с компьютером через разъем микро USB Спецификация: Размеры: 67x40x10mm Вес: 17g Комплектация: Плата HKPilot Мега 2.5 – 1шт. Соединительный шнур 3pin 2.54mm – 5 шт. *Примечания: Поставляется без модуля GPS. Продается отдельно. Этот продукт основан на проекте http://3drobotics.com/apm/ от 3D Robotics | комплект | 5080,96 | ||||||||||||||||||||||||||||||
| HK387000058-0 | HKPilot Micro GPS and Compass Module U-BLOX 7 (8g) [HK387000058-0/64142] | мини GPS-модуль с компасом MAX-7Q (U-BLOX 7).The New HKPilot Micro GPS and Compass module is perfect for the small class multirotor, planes or even standalone OSD application. Featuring the new u-Blox MAX 7 chipset and a matched 15x15 dual amplified ceramic antenna, this micro GPS is packing full size power. The micro GPS also has the Honeywell HMC5883 Compass for remote location, to get your compass away from sources of interference. All this power and features, all at just 8g, the HKPilot Micro GPS all so comes with cables for both the 5 pin HKPilot Mega (APM), and the 6 pin HKPilot 32 (Pixhalk). This Micro GPS is also perfect for the MWC and Naze32 applications as well. Features:
Features:• Active ceramic antenna, 15 × 15mm, comes with two LNA low-noise amplifier • UART interfaces with EMI protection design, the RXD port can be compatible with 5V level signal input • Build in HMC5883 compass I2C interface • HG-U06 GPS with a standard UART (TTL) serial interface, common in most of the flight control • Default setting Baud rate: 38400, update rate: 10hz • 56ch u-blox 7 multi-GNSS (GPS, GLONASS, Galileo, QZSS and SBAS) engine Specs: Dimensions (mm): 20 (width) x 22 (length) × 8.5 (H) Weight (g): 8.2 (without cable) GPS module: u-blox MAX-7Q Onboard interface: Molex 1.25mm-4Pin(I2C), 6Pin(UART) Included: GPS MODULE * 1 I2C 4pin cable* 1 UART 6pin to 5pin cable* 1 (for APM) UART 6pin to 6pin cable* 1 (for PX4) *PX4/Pixhawk is an independent, open-source, open-hardware project aiming at providing a high-end autopilot to the academic, hobby and industrial communities (BSD licensed) **The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. GPSmodule | комплект | 1765,67 | ||||||||||||||||||||||||||||||
| HK387000050-0 | HKPilot32 Autonomous Vehicle 32Bit Control Set w/ Power Module [387000050-0/55561] | Полетный контроллер - HKPilot32 с датчиком токаThe HKPilot32 is the next step in FC hardware with its powerful ST micro 32bit ARM Cortex core and massive I/O support. The HK Pilot32 is one of the most advanced autopilot systems available with support for almost any type of vehicle from a moon rover or a multirotor aircraft, even a submarine! Designed by the PX4 open-hardware project, it is supported by a number of development communities making this one of the most flexible and reliable platforms for vehicle control, with many features and functions sure to be available in the future.With powerful integrated multithreading NuttX RTOS, a Unix/Linux-like programming environment, completely new autopilot functions, auto detection and configuration of peripherals and a seamless transition from a HK Pilot Mega or APM, these advanced capabilities remove the limitation to your autonomous vehicle. For Documentation and User Guides please click HERE Features: • Advanced 32 bit ARM Cortex® M4 Processor running NuttX RTOS • 14 PWM/servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible) • Abundant connectivity options for additional peripherals (UART, I2C, CAN) • Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply • Backup system integrates mixing, providing consistent autopilot and manual override mixing modes • Redundant power supply inputs and automatic failover • External safety button for easy motor activation • Multicolor LED indicator • High-power, multi-tone piezo audio indicator • microSD card for long-time high-rate logging Specs: Size: 81×44×15mm Weight: 33.1g Microprocessor: 32-bit STM32F427 Cortex M4 core with FPU 168 MHz/256 KB RAM/2 MB Flash 32 bit STM32F103 failsafe co-processor Sensors: ST Micro L3GD20 3-axis 16-bit gyroscope ST Micro LSM303D 3-axis 14-bit accelerometer / magnetometer Invensense MPU 6000 3-axis accelerometer/gyroscope MEAS MS5611 barometer Interfaces: 5x UART (serial ports), one high-power capable, 2x with HW flow control 2x CAN Spektrum DSM / DSM2 / DSM-X® Satellite compatible input up to DX8 (DX9 and above not supported) Futaba S.BUS® compatible input and output PPM sum signal RSSI (PWM or voltage) input I2C® SPI 3.3 and 6.6V ADC inputs External microUSB port Included: HK Pilot32 autopilot Buzzer Safety switch button 10s power module with XT60 connectors and 6-position connector cable Extra 6-position cable to connect a GPS+Compass module Micro USB cable SD card Mounting foam 3-wire servo cable I2C splitter module with cable Note: HK Pilot32 is a PPM-input autopilot, which means that it gets RC input from a single cable to the receiver, either via the PPM port, the Futaba S.BUS port, or the special satellite receiver port for Spektrum gear. Most modern RC receivers allow for PPM output, but some, such as non-S.BUS Futaba receivers do not. *PX4/Pixhawk is an independent, open-source, open-hardware project aiming at providing a high-end autopilot to the academic, hobby and industrial communities (BSD licensed) **The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. | комплект | 8169,87 | ||||||||||||||||||||||||||||||
| G-OSD2 | Hobbyking G-OSD II Mini OSD System w/GPS Module [G-OSD2] | Система наложения телеметрической информации на передаваемый с борта видеосигнал Hobbyking G-OSD II Mini OSD, с GPS модулемЛегкая и компактная система Hobbyking G-OSD II Mini OSD для установки на электро-модели, даже небольшого размера.*Используется корейский GPS модуль 4-го поколения с большей частотой обновления чем в первой версии G-OSD. Особенности: - Отображение GPS координат - Отображение времени - Отображение скорости полета - Вольтметр - Таймер - RSSI - отображение качества сигнала приемника радиоуправления - Настраиваемые показатели на дисплей - Поддержка NTSC и PAL TV Signal - Защита от затенения управляющего сигнала - Поддержка ручной калибровки 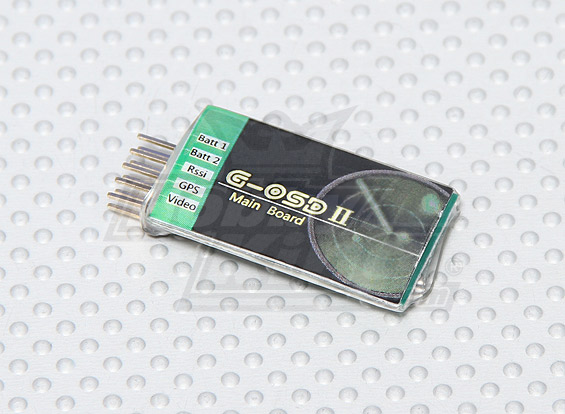
 Характеристики:
Характеристики:Масса: Основной блок - 4.6г / GPS модуль - 22г Размеры: Основной блок - 34x4x20мм / GPS модуль - 35x5x35мм Рабочее напряжение: Основной блок - 7.4~12В / GPS модуль - 5В | комплект | 3251,36 | ||||||||||||||||||||||||||||||
| HK9171000073 | Hobbyking KK2.0 Multi-rotor LCD Flight Control Board [9171000073] | Полетный контроллер для мультикоптера - Hobbyking KK2.0 Multi-rotor LCD Flight Control BoardВ комплекте: плата электроники со встроенным LCD-дисплеем и динамиком (без USB-программатора) .Designed by the Grand father of the KK revolution, Rolf R Bakke, exclusively for HobbyKing, the KK2.0 is the evolution of the first generation KK flight control boards. The KK2.0 was engineered from the ground up to bring multi-rotor flight to everyone, not just the experts. The LCD screen and built in software makes install and setup easier than ever. A host of multi-rotor craft types are pre-installed. simply select your craft type, check motor layout/propeller direction, calibrate your ESCs and radio and your ready to go! all of which is done with easy to follow on screen prompts!The original KK gyro system has been updated to an incredibly sensitive dual chip 3 Axis gyro and single chip 3 axis accelerometer system making this the most stable KK board ever and allowing for the addition of an Auto-level function. At the heart of the KK2.0 is an Atmel Mega324PA If your new to multi-rotor flight or have been unsure about how to setup a KK board then the KK2.0 was built for you. The 6 Pin USBasp AVR Programming interface ensures future software updates will be quick and easy. 
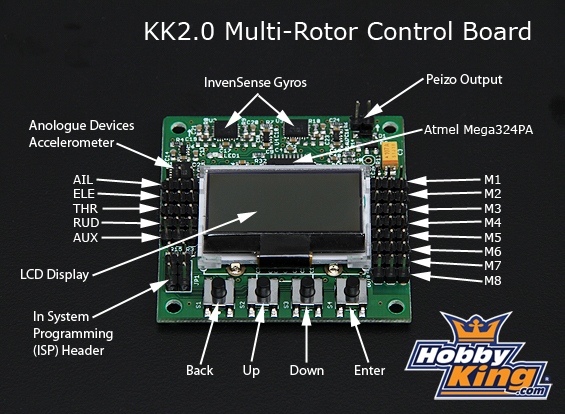
Specs. Size: 50.5mm x 50.5mm x 12mm Weight: 21 gram (Inc Piezo buzzer) IC: Atmega324 PA Gyro: InvenSense Inc. Accelerometer: Anologue Devices Inc. Auto-level: Yes Input Voltage: 4.8-6.0V AVR interface: standard 6 pin. Signal from Receiver: 1520us (5 channels) Signal to ESC: 1520us Pre-installed firmware. Dualcopter Tricopter Y6 Quadcopter + Quadcopter X Hexcopter + Hexcopter X Octocopter + Octocopter X X8 + X8 X H8 H6 V8 V6 Aero 1S Aileron Aero 2S Aileron Flying Wing Singlecopter 2M 2S Singlecopter 1M 4S (Custom Mix via the «Mixer Editor» option) The Mixer Editor allows you to adjust where and how much signal the motors receive from stick input and sensors. This allows you to create any configuration possible with up to 8 motors or servos. Whats is a Multi-Rotor Control board you ask? The HobbyKing KK2.0 Multi-Rotor controller is a flight control board for multi-rotor Aircraft (Tricopters, Quadcopters, Hexcopters etc). Its purpose is to stabilize the aircraft during flight. To do this it takes the signal from the three on board gyros (roll, pitch and yaw) then passes the signal to the Atmega324PA IC. The Atmega324PA IC unit then processes these signals according the users selected firmware and passes control signals to the installed Electronic Speed Controllers (ESCs). These signals instruct the ESCs to make fine adjustments to the motors rotational speed which in turn stabilizes your multi-rotor craft. The HobbyKing KK2.0 Multi-Rotor control board also uses signals from your radio systems receiver (Rx) and passes these signals to the Atmega324PA IC via the ail, ele, thr and rud inputs. Once this information has been processed the IC will send varying signals to the ESCs which in turn adjust the rotational speed of each motor to induce controlled flight (up, down, backwards, forwards, left, right, yaw). | комплект | 2199,02 | ||||||||||||||||||||||||||||||
| HK9171000334-0 | Hobbyking KK2.1 Multi-rotor LCD Flight Control Board w/6050MPU & Atmel 644PA [9171000073] | Полетный контроллер для мультикоптера - Hobbyking KK2.1 Multi-rotor LCD Flight Control Board с датчиком 6050MPU и процессором Atmel 644PAВ комплекте: плата электроники со встроенным LCD-дисплеем и динамиком (без USB-программатора).Революционная разработка для управления мультироторными системами теперь доступна! Плата управления KK2.1 является очередным эволюционный этапом развития первого поколения. KK2.1 был разработан чтобы предоставить возможность управления мультироторными системами полета для всех, а не только для экспертов. Интегрированный на плате ЖК-экран и встроенное программное обеспечение позволяет проще чем когда-либо, произвести нужные установки и настройки. Множество различных конфигураций мультироторных систем уже прошито предварительно. Просто выберите конфигурацию летательного аппарата, проверьте направление вращения мотора и правильность выбранного винта, откалибруйте ESC и подключите аппаратуру управления, и вы готовы к полёту! Все это можно сделать очень просто следуя подсказкам на экране! Оригинальная гироскопная система была полностью обновлена, установлен сверхчувствительный датчик 6050 MPU, что позволило обеспечить наиболее стабильные характеристики управления полета. В основу KK2.1 лёг уже всем известный 8-ми разрядный AVR RISC-based чип Atmel Mega644PA с 64 Кб памяти. А добавленные 2 канала позволили управлять работой до 8 моторов (октокоптер). Добавлена функция звукового предупреждения при включении и отключении платы. Если раньше Вы не понимали, как настроить Вашу плату управления или Вы не были уверены в верности её настройки, то KK2.1 просто создана для вас. Простой и удобный интерфейс меню настроек даст возможность быстро и легко произвести необходимые настройки, а стандартный 6 Pin USBasp AVR программный интерфейс, обновить программное обеспечения самой платы (программатор приобретается отдельно). Технические характеристики:Размер: 50.5×50.5×12 мм Вес: 21 гр (включая пищалку) Чип IC: Atmega644 PA Гироскопы/Акселерометры: 6050MPU InvenSense Inc. Автовыравнивание: Да Напряжение питания: 4.8-6.0 В Интерфейс AVR: стандартный 6 pin. Сигнал приемника: 1520 us (5 каналов) Сигнал ESC: 1520 us 
 
 
 
 Версия прошивки: 1.5 Предустановленные в прошивке конфигурации. Dual коптер Трикоптер Гексакоптер конфигурации Y Квадрокоптер конфигурации «+» Квадрокоптер конфигурации «х» Октокопртер конфигурации «+» Октокопртер конфигурации «х» X8 + X8 X H8 H6 V8 V6 Самолёт 1 канал управления элеронами Самолёт 2 сервопривода элерона Летающее крыло Singlecopter 2 мотора 2 сервопривода Singlecopter 1 мотор 4 сервопривода (вариант Свободного Mix через редактор) Редактор Свободного Mix позволяет устанавливать, куда и какой сигнал получат двигатели с выхода приемника и датчиков. Это позволяет создавать любые конфигурации с возможностью управления работой до 8 моторов или сервоприводов. Что представляет собой плата управления и как она работает? Плата HobbyKing KK2.1 управляет полетом летательного аппарата при помощи нескольких двигателей (мультикоптер). Задача данной платы стабилизировать летательный аппарат во время полета. Для этого плата принимает сигналы от трех гироскопов, расположенных на борту (крена, тангажа и рысканья), а затем передает сигналы для обработки процессору Atmega644PA IC. Процессор Atmega644PA IC обрабатывает поступающие сигналы, в соответствии с установленным пользователем программным обеспечением и передает управляющие сигналы ESC-контроллерам двигателей для управления скоростью вращения двигателей и как следствие стабилизации вашего летательного аппарата. Плата HobbyKing KK2.1 управления так же принимает сигналы, поступающие от вашего приемника и через согласующие элементы передает эти сигналы для обработки процессору Atmega644PA IC. После их обработки процессор Atmega644PA IC посылает сигналы ESC-контроллерам двигателей для установки скорости вращения, что ведет к изменению направления движения летательного аппарата (вверх, вниз, назад, вперед, влево, вправо, рыскания). | комплект | 2199,02 | ||||||||||||||||||||||||||||||
| HK9171000525-0 | HobbyKing KK-Mini Multi-Rotor Flight Control Board 36x36mm (30.5x30.5mm) [9171000525-0] | Полётный контроллер HobbyKing™ KK-Mini на плате 36x36мм для мини-коптераСледующий шаг в развитии полётных контроллеров для мультикоптеров! KK-mini использует все возможности КК-контроллеров, но размещается на совсем небольшой платке.Пусть небольшой размер не вводит вас в заблуждение. KK-Mini основан на архитектуре контроллера KK2.1.5 и имеет одинаковый с ним набор входов и выходов, и тот же набор функций, в том числе - LCD-экран с чётким изображением и 4 кнопки для управления настройками. Но размер 36мм позволяет комфортно размещать платку на популярных рамах для мини-коптеров. В контроллере «прошито» большое количество предустановок для различных летательных аппаратов. Так что достаточно выбрать подходящий из них, проверить правильность вращения моторов и установки винтов на них, откалибровать регуляторы, настроить радиоаппаратуру - и можно отправляться в полёт. Если и это вам покажется непростым, тогда просто следуйте подсказкам на экране! Система датчиков включает в себя сверхчувствительный 6050 MPU, который делает полёт аппарата с этим контроллером потрясающе стабильным. А сердцем контроллера является 8-разрядный чип Atmel Mega644PA с AVR RISC-архитектурой и 64 Кбайт памяти. На плате уже присутствует защита от переполюсовки и контроль напряжения, так что не понадобится ничего паять для этого. Добавлена также функция звукового предупреждения при включении и отключении платы. Если вы новичок в мире мультикоптеров или просто не получалось нормально настроить предыдущие версии KK-контроллеров, то KK-Mini просто создан для вас. А стандартный 6-пиновый AVR-интерфейс для USBasp-программатора позволит легко обновить «прошивку» контроллера. 
 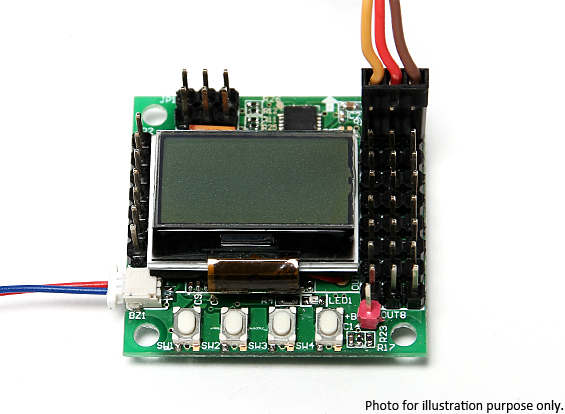
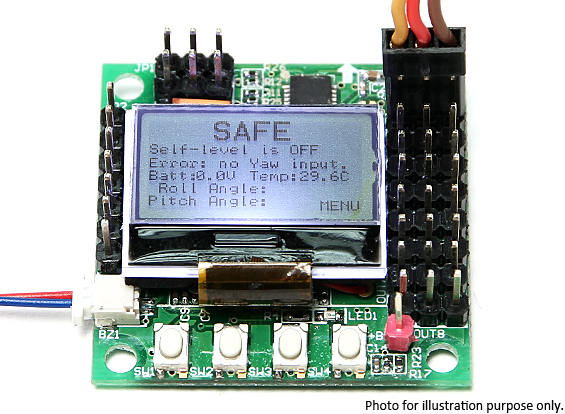 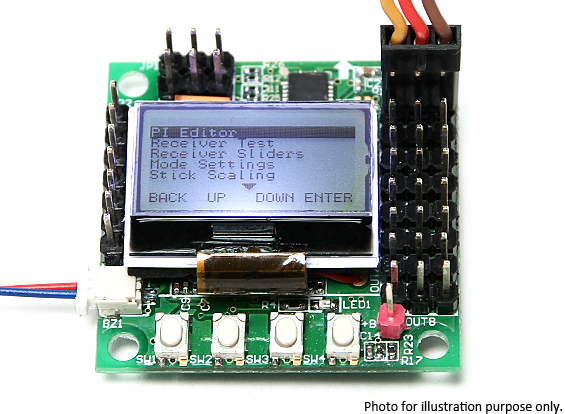
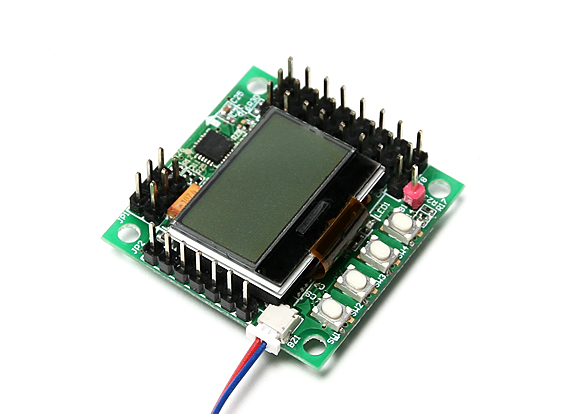 Характеристики: Размеры: 36x36x11.5мм (крепёжные отверстия 30.5x30.5мм) Вес: 8.6 г Микроконтроллер: Atmega644 PA Датчики: 6050MPU InvenSense Inc. Auto-level: Есть Напряжение питания: 4.8-6.0V AVR-интерфейс: стандартный 6-пиновый Сигнал от приёмника: 1520мкс (5 каналов) Сигнал на регуляторы: 1520мкс LCD-экран: 24х18мм Кнопки управления: 3.3х4.2мм (4 шт.) Контроль напряжения: Спец. контакт, отмеченный красным Входные разъёмы: Одноконтактные в ряд с шагом 2.54мм Прошивка 1.6: с предустановленными конфигурациями Бикоптер Трикоптер Квадрокоптеры +, X Гексакоптеры +, X, Y6, H6 Октокоптеры +, X, +8, X8, H8, V8, V6 Самолёт с 1 сервомашинкой на элерон Самолёт с 2 сервомашинками на элерон Летающее крыло Монокоптер 2 мотора, 2 сервомашинки Монокоптер 1 мотор, 4 сервомашинки Раздел настроек "Mixer Editor" позволяет гибко настроить каким образом подавать сигнал на регуляторы (моторы) и/или сервомашинки в зависимости от управляющих сигналов с радиоаппаратуры. Всего поддерживается 8 выходных каналов. Возможно подключение всех каналов некоторых приёмников одним проводом к каналу газа: - Сателлит DSM2/DSMJ через специальный адаптер DSM-CPPM. - Поддерживающие шину SBUS через специальный адаптер SBUS-CPPM. ** Замечание: Рекомендуется перед использованием по возможности обновить прошивку на более новую. *** Замечание: На KK-Mini можно использовать те же прошивки, что и для плат версий KK2.1 .. 2.1.5 | комплект | 544,70 | ||||||||||||||||||||||||||||||
| APACHE-GPSKIT | Hobbyking OSD System (Full Combo) [APACHE-GPSKIT/17140] | Система Hobbyking OSD (полный набор): основной модуль, модули питания, GPS, USB, температурный, ИК-пульт.Hobbyking OSD System (Full Combo): Main Board, Power Module, USB/GPS/IR/TEMP Modules w/RemoteOSD - On-Screen Display, устройство отображения данных поверх изображения с другого источника, в данном случае - поверх изображения с камеры, транслируемого на землю Этот набор - простой и быстрый способ добавить полезные данные в картинку с FPV-камеры. Устройство показывает множество полезных параметров: GPS координаты, скорость, параметры электросистемы и многое другое (полный список ниже). Больше нигде вы не найдёте такой богатой комплектации за такие деньги - в комплекте даже ИК-пульт дистанционного управления для настройки! Особенностью системы является новый режим "направление домой": Устройство запоминает последнее место, где самолёт был на земле (скорость ниже 10 км/ч в течение полусекунды) и считает его "домом". После взлёта (до следующей посадки) устройство сравнивает текущие координаты с координатами "дома", высчитывает направление и сообщает его пилоту (относительно текущего курса). Если вы потерялись - просто летите по стрелочке! Технические характеристики: Основной модуль: Вес: 17 г Габариты: 60 x 18 x 34 мм Модуль измерения батареи: Вес: 23 г Габариты: 57 x 13 x 31 мм Отображаемые параметры: Основные: Таймер Дата Температура (с выносного датчика) Статус бортового "самописца" Линия горизонта (неподвижная, для визуального выравнивания по камере) Напряжение дополнительного аналогового входа (батарея или RSSI) Питание: Напряжение батареи Визуальный индикатор разряда Ток потребления батареи Израсходованная ёмкость GPS: Статус GPS Текущие координаты Направление полёта ("компас") Направление, дистанция и высота относительно "дома" Высота над уровнем моря Максимальная достигнутая высота Шкалы высоты и скорости Скорость относительно земли Вертикальная скорость (вариометр) | комплект | 7642,56 | ||||||||||||||||||||||||||||||
| HK298000008-0 | HobbyKing Tiny OSD III (w/10Hz GPS and 80A Current sensor) (XT60) (43280) [298000008-0] | Комплект телеметрии HobbyKing Tiny OSD III с GPS и выводом информации на экран для FPV моделейОсобенности:— Встроенный барометр. — Максимально миниатюрный размер. — Высокоточный 80A датчик тока. — Онлайн обновление прошивок. — Настраиваемый OSD экран. — Разъемы XT60 — Результаты полета — 10Hz GPS, с батарейкой ,3D Fix led indicator. — PAL/NTSC совместимость — RSSI Auto detected. — Автоматическая установка домашней точки (при включении) Характеристики: Масса: 41г (общая) Размеры: Главная плата 41x24x11мм GPS модуль 35x27x9мм Датчик тока: 58x25x9мм Рабочее напряжение: OSD 7.4V-12V / GPS Module 5V OSD отображет: — Скорость | Высота | Расстояние — Направление на домашнюю точку — GPS сигнал — Напряжение силовой батареи — Потребляемый ток — Израсходованная емкость mAh  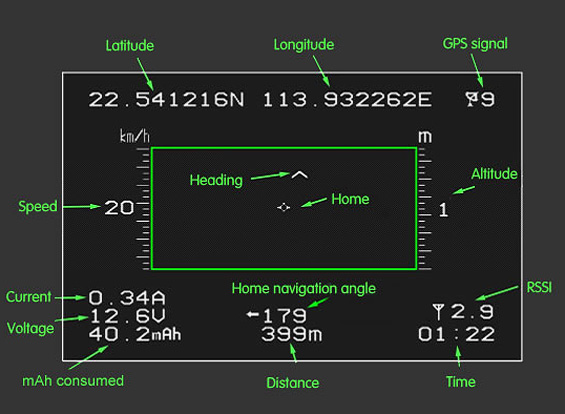  Комплектация: — 10HZ GPS 1шт — Датчик тока 1шт — Основной блок OSD 1шт — Инструкция (English) 1шт | комплект | 6616,85 | ||||||||||||||||||||||||||||||
| HB-12012 | HolyBro M8N GPS Module with Compass LED Indicator for Pixhawk 4 [HB-12012] | Модуль HolyBro M8N с компасом+LED+Safety Switch для Pixhawk 4 (JST-GH 10-pin)Модуль GPS Ublox NEO-M8N HolyBro с компасом в пластиковом кейсе. Один из самых быстрых и точных GPS модулей. В сравнении с предыдущими версиями так же имеет более низкое потребление питания и поддержку спутников Глонасс. Идеально подходит для точных и стабильных полетов по карте на воздушных судах.Особенности Совместим с автопилотом HolyBro PIXHAWK4. Основан на модуле GPS UBLOX M8N, имеет на борту магнетометр IST8310, 3-цветный LED индикатор и кнопка Safety switch По умолчанию настроен на 38400 5Hz    Характеристики Модуль GPS Ublox Neo-M8N Чувствительность навигации –167 dBm Холодный старт: 26s LNA MAX2659ELT+ Керамическая патч антенна 25x25x4мм Перезаряжаемый суперконденсатор Малошумный регулятор напряжения 3.3V Индикация 3D фиксации Защитный корпус Кабель 26см с коннектором JST-GH 10-pin, совместим с Pixhawk4 Диаметр с корпусом: 50мм Масса с корпусом: 32г Комплектация Модуль GPS - 1 шт Складная пластиковая стойка (стержни 70мм и 140мм) - 1 шт GPSmodule | комплект | 2375,73 | ||||||||||||||||||||||||||||||
| HB-20069 | HolyBro Pixhawk 4 (aluminum case) & GPS UBLOX M8N & PM02 [20069] | Полетный контроллер HolyBro Pixhawk 4 (алюминиевый корпус) с модулем M8N GPS/Compass, и модулем питания PM02The most advanced development kit for the PX4® autopilotPixhawk® 4 is the latest update to the successful family of Pixhawk flight controllers. It is designed and developed in collaboration with Holybro and Auterion, optimized to run PX4. It comes preinstalled with the latest PX4 firmware. It features the currently most advanced processor technology from STMicroelectronics®, sensor technologyfromBosch®,InvenSense®, andaNuttXreal-timeoperatingsystem,deliveringincredible performance, flexibility, and reliability for controlling any autonomous vehicle. The Pixhawk 4’s microcontroller now has a 2MB flash memory and 512KB RAM. With the increased power and RAM resources, developers can be more productive and efficient with their development work. More complex algorithms and models can be implemented on the autopilot. High-performance, low-noise IMUs on board are designed for stabilization applications. Data-ready signals from all sensors are routed to separate interrupt and timer capture pins on the autopilot, permitting precise time-stamping of sensor data. Newly designed vibration isolations enables more accurate readings, allowing vehicles to reach better overall flight performances. The two external SPI buses and six associated chip select lines allow to add additional sensors and SPI-interfaced payload. There are total of four I2C buses, two dedicated for external use and two grouped with serial ports for GPS/Compass modules. The Pixhawk 4 autopilot development kit is perfect for developers at corporate research labs, startups, and for academics (research, professors, students). Spec Main FMU Processor: STM32F76 (32 bit ARM® Cortex® M7, 216 MHz Processor running NuttX RTOS, more computing power and 2X the RAM than previous versions) Abundant connectivity options for additional peripherals (UART, I2C, CAN) Redundant power supply inputs and automatic failover External safety button for easy motor activation New sensors with higher temperature stability Multicolor LED indicator Integrated vibrations isolation High-power, multi-tone piezo audio indicator microSD card for long-time high-rate logging 16 PWM outputs Increased ease-of-use: pre-installed with most recent PX4 (v1.9.2) Electrical Data Voltage Ratings: Power module output: 4.9~5.5V Max input voltage: 6V Max current sensing: 120A USB Power Input: 4.75~5.25V Servo Rail Input: 0~36V Mechanical Data Dimensions: 44x84x12mm Weight: 33.3g 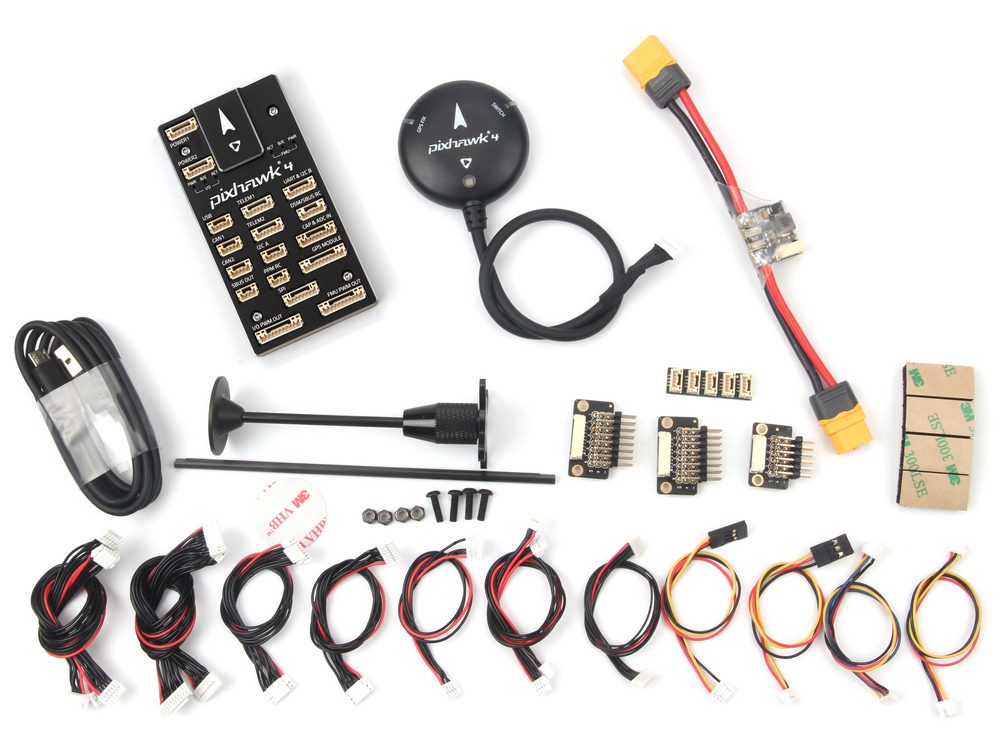 Package Included (20068&20069) Pixhawk4 *1 Pixhawk4 GPS MODULE *1 Power Module(PM02) *1 I2C splitter Board *1 6 to 6 pin cable (power) *3 4 to 4 pin cable (CAN) *2 6 to 4 pin cable (Data) *1 10 to 10 pin cable (PWM) *2 8 to 8 pin cable(AUX) *1 7 to 7 pin cable(SPI) *1 6 to 6 pin cable(Debug) *1 PPM/SBUS out cable *1 XSR receiver cable *1 DSMX receiver cable *1 SBUS receiver cable *1 USB cable *1 'X'type folding pedestal mount *1 70mm & 140mm carbon rod stand off *2 6*3 2.54mm pitch Horizontal Pin *1 8*3 2.54mm pitch Horizontal Pin *2 Foam Set *1 Pixhawk4 Quick Start Guide *1 Pixhawk4 Pinouts *1 PM02 Quick Start Guide *1 | комплект | 12963,86 | ||||||||||||||||||||||||||||||
| HB-20035 | HolyBro Pixhawk 4 (aluminum case) & GPS UBLOX M8N & PM07 [20035] | Полетный контроллер HolyBro Pixhawk 4 (алюминиевый корпус) с модулем M8N GPS/Compass, и распределительной платой с модулем питания PM07The most advanced development kit for the PX4® autopilotPixhawk® 4 is the latest update to the successful family of Pixhawk flight controllers. It is designed and developed in collaboration with Holybro and Auterion, optimized to run PX4. It comes preinstalled with the latest PX4 firmware. It features the currently most advanced processor technology from STMicroelectronics®, sensor technologyfromBosch®,InvenSense®, andaNuttXreal-timeoperatingsystem,deliveringincredible performance, flexibility, and reliability for controlling any autonomous vehicle. The Pixhawk 4’s microcontroller now has a 2MB flash memory and 512KB RAM. With the increased power and RAM resources, developers can be more productive and efficient with their development work. More complex algorithms and models can be implemented on the autopilot. High-performance, low-noise IMUs on board are designed for stabilization applications. Data-ready signals from all sensors are routed to separate interrupt and timer capture pins on the autopilot, permitting precise time-stamping of sensor data. Newly designed vibration isolations enables more accurate readings, allowing vehicles to reach better overall flight performances. The two external SPI buses and six associated chip select lines allow to add additional sensors and SPI-interfaced payload. There are total of four I2C buses, two dedicated for external use and two grouped with serial ports for GPS/Compass modules. The Pixhawk 4 autopilot development kit is perfect for developers at corporate research labs, startups, and for academics (research, professors, students). Spec Main FMU Processor: STM32F76 (32 bit ARM® Cortex® M7, 216 MHz Processor running NuttX RTOS, more computing power and 2X the RAM than previous versions) Abundant connectivity options for additional peripherals (UART, I2C, CAN) Redundant power supply inputs and automatic failover External safety button for easy motor activation New sensors with higher temperature stability Multicolor LED indicator Integrated vibrations isolation High-power, multi-tone piezo audio indicator microSD card for long-time high-rate logging 16 PWM outputs Increased ease-of-use: pre-installed with most recent PX4 (v1.9.2) Electrical Data Voltage Ratings: Power module output: 4.9~5.5V Max input voltage: 6V Max current sensing: 120A USB Power Input: 4.75~5.25V Servo Rail Input: 0~36V Mechanical Data Dimensions: 44x84x12mm Weight: 33.3g 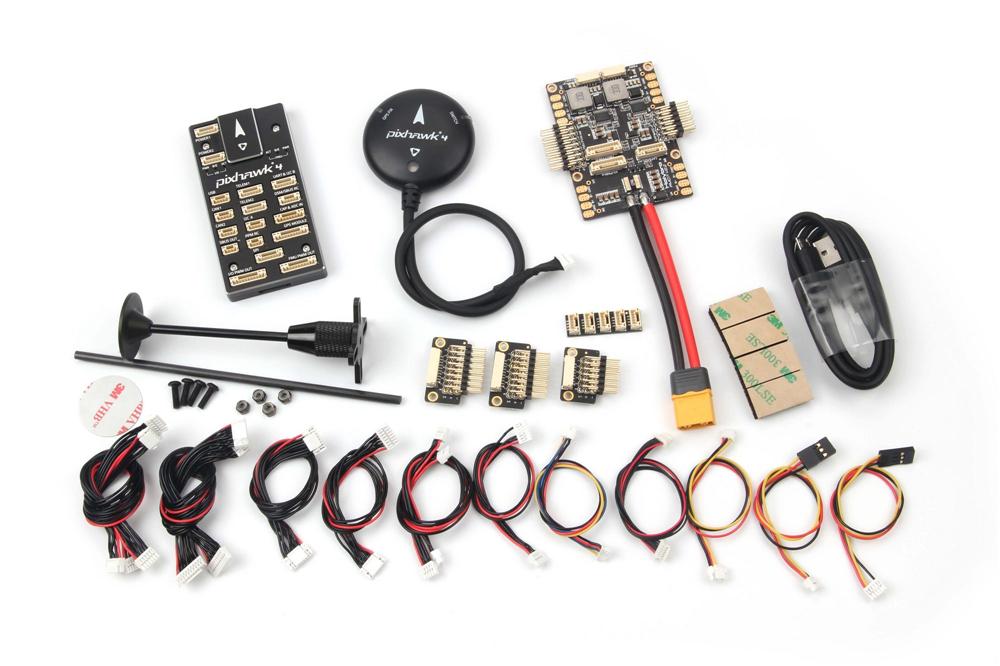 Package Included (20034&20035) Pixhawk4 *1 Pixhawk4 GPS MODULE *1 Pixhawk 4 Power Management Board *1 I2C splitter Board *1 6 to 6 pin cable (power) *3 4 to 4 pin cable (CAN) *2 6 to 4 pin cable (Data) *1 10 to 10 pin cable (PWM) *2 8 to 8 pin cable(AUX) *1 7 to 7 pin cable(SPI) *1 6 to 6 pin cable(Debug) *1 PPM/SBUS out cable *1 XSR receiver cable *1 DSMX receiver cable *1 SBUS receiver cable *1 USB cable *1 'X'type folding pedestal mount *1 70mm & 140mm carbon rod stand off *2 6*3 2.54mm pitch Horizontal Pin *1 8*3 2.54mm pitch Horizontal Pin *2 Foam Set *1 Pixhawk4 Quick Start Guide *1 Pixhawk4 Pinouts *1 Power Management Board Quick Start Guide *1 | комплект | 12963,86 | ||||||||||||||||||||||||||||||
| HB-20068 | HolyBro Pixhawk 4 (plastic case) & GPS UBLOX M8N & PM02 [20068] | Полетный контроллер HolyBro Pixhawk 4 (пластиковый корпус) с модулем M8N GPS/Compass, и модулем питания PM02The most advanced development kit for the PX4® autopilotPixhawk® 4 is the latest update to the successful family of Pixhawk flight controllers. It is designed and developed in collaboration with Holybro and Auterion, optimized to run PX4. It comes preinstalled with the latest PX4 firmware. It features the currently most advanced processor technology from STMicroelectronics®, sensor technologyfromBosch®,InvenSense®, andaNuttXreal-timeoperatingsystem,deliveringincredible performance, flexibility, and reliability for controlling any autonomous vehicle. The Pixhawk 4’s microcontroller now has a 2MB flash memory and 512KB RAM. With the increased power and RAM resources, developers can be more productive and efficient with their development work. More complex algorithms and models can be implemented on the autopilot. High-performance, low-noise IMUs on board are designed for stabilization applications. Data-ready signals from all sensors are routed to separate interrupt and timer capture pins on the autopilot, permitting precise time-stamping of sensor data. Newly designed vibration isolations enables more accurate readings, allowing vehicles to reach better overall flight performances. The two external SPI buses and six associated chip select lines allow to add additional sensors and SPI-interfaced payload. There are total of four I2C buses, two dedicated for external use and two grouped with serial ports for GPS/Compass modules. The Pixhawk 4 autopilot development kit is perfect for developers at corporate research labs, startups, and for academics (research, professors, students). Spec Main FMU Processor: STM32F76 (32 bit ARM® Cortex® M7, 216 MHz Processor running NuttX RTOS, more computing power and 2X the RAM than previous versions) Abundant connectivity options for additional peripherals (UART, I2C, CAN) Redundant power supply inputs and automatic failover External safety button for easy motor activation New sensors with higher temperature stability Multicolor LED indicator Integrated vibrations isolation High-power, multi-tone piezo audio indicator microSD card for long-time high-rate logging 16 PWM outputs Increased ease-of-use: pre-installed with most recent PX4 (v1.9.2) Electrical Data Voltage Ratings: Power module output: 4.9~5.5V Max input voltage: 6V Max current sensing: 120A USB Power Input: 4.75~5.25V Servo Rail Input: 0~36V Mechanical Data Dimensions: 44x84x12mm Weight: 33.3g Package Included (20068&20069) Pixhawk4 *1 Pixhawk4 GPS MODULE *1 Power Module(PM02) *1 I2C splitter Board *1 6 to 6 pin cable (power) *3 4 to 4 pin cable (CAN) *2 6 to 4 pin cable (Data) *1 10 to 10 pin cable (PWM) *2 8 to 8 pin cable(AUX) *1 7 to 7 pin cable(SPI) *1 6 to 6 pin cable(Debug) *1 PPM/SBUS out cable *1 XSR receiver cable *1 DSMX receiver cable *1 SBUS receiver cable *1 USB cable *1 'X'type folding pedestal mount *1 70mm & 140mm carbon rod stand off *2 6*3 2.54mm pitch Horizontal Pin *1 8*3 2.54mm pitch Horizontal Pin *2 Foam Set *1 Pixhawk4 Quick Start Guide *1 Pixhawk4 Pinouts *1 PM02 Quick Start Guide *1 | комплект | 12377,26 | ||||||||||||||||||||||||||||||
| HB-20034 | HolyBro Pixhawk 4 (plastic case) & GPS UBLOX M8N & PM07 [20034] | Полетный контроллер HolyBro Pixhawk 4 (пластиковый корпус) с модулем M8N GPS/Compass, и распределительной платой с модулем питания PM07The most advanced development kit for the PX4® autopilotPixhawk® 4 is the latest update to the successful family of Pixhawk flight controllers. It is designed and developed in collaboration with Holybro and Auterion, optimized to run PX4. It comes preinstalled with the latest PX4 firmware. It features the currently most advanced processor technology from STMicroelectronics®, sensor technologyfromBosch®,InvenSense®, andaNuttXreal-timeoperatingsystem,deliveringincredible performance, flexibility, and reliability for controlling any autonomous vehicle. The Pixhawk 4’s microcontroller now has a 2MB flash memory and 512KB RAM. With the increased power and RAM resources, developers can be more productive and efficient with their development work. More complex algorithms and models can be implemented on the autopilot. High-performance, low-noise IMUs on board are designed for stabilization applications. Data-ready signals from all sensors are routed to separate interrupt and timer capture pins on the autopilot, permitting precise time-stamping of sensor data. Newly designed vibration isolations enables more accurate readings, allowing vehicles to reach better overall flight performances. The two external SPI buses and six associated chip select lines allow to add additional sensors and SPI-interfaced payload. There are total of four I2C buses, two dedicated for external use and two grouped with serial ports for GPS/Compass modules. The Pixhawk 4 autopilot development kit is perfect for developers at corporate research labs, startups, and for academics (research, professors, students). Spec Main FMU Processor: STM32F76 (32 bit ARM® Cortex® M7, 216 MHz Processor running NuttX RTOS, more computing power and 2X the RAM than previous versions) Abundant connectivity options for additional peripherals (UART, I2C, CAN) Redundant power supply inputs and automatic failover External safety button for easy motor activation New sensors with higher temperature stability Multicolor LED indicator Integrated vibrations isolation High-power, multi-tone piezo audio indicator microSD card for long-time high-rate logging 16 PWM outputs Increased ease-of-use: pre-installed with most recent PX4 (v1.9.2) Electrical Data Voltage Ratings: Power module output: 4.9~5.5V Max input voltage: 6V Max current sensing: 120A USB Power Input: 4.75~5.25V Servo Rail Input: 0~36V Mechanical Data Dimensions: 44x84x12mm Weight: 33.3g Package Included (20034&20035) Pixhawk4 *1 Pixhawk4 GPS MODULE *1 Pixhawk 4 Power Management Board *1 I2C splitter Board *1 6 to 6 pin cable (power) *3 4 to 4 pin cable (CAN) *2 6 to 4 pin cable (Data) *1 10 to 10 pin cable (PWM) *2 8 to 8 pin cable(AUX) *1 7 to 7 pin cable(SPI) *1 6 to 6 pin cable(Debug) *1 PPM/SBUS out cable *1 XSR receiver cable *1 DSMX receiver cable *1 SBUS receiver cable *1 USB cable *1 'X'type folding pedestal mount *1 70mm & 140mm carbon rod stand off *2 6*3 2.54mm pitch Horizontal Pin *1 8*3 2.54mm pitch Horizontal Pin *2 Foam Set *1 Pixhawk4 Quick Start Guide *1 Pixhawk4 Pinouts *1 Power Management Board Quick Start Guide *1 | комплект | 12377,26 | ||||||||||||||||||||||||||||||
| HB-20054 | HolyBro Pixhawk 4 Mini (aluminum case) & GPS UBLOX M8N & PM06 V2 [20054] | Полетный контроллер HolyBro Pixhawk 4 Mini (алюминиевый корпус) с модулем M8N GPS/Compass, и распределительной платой с модулем питания PM06 V2The Pixhawk® 4 Mini autopilot is designed for engineers and hobbyists who are looking to tap into the power of Pixhawk 4 but are working with smaller drones. Pixhawk 4 Mini takes the FMU processor and memory resources from the Pixhawk 4 while eliminating normally unused interfaces. This allows the Pixhawk 4 Mini to be small enough to fit in a 250mm racer drone. The Pixhawk 4 Mini is easy to install; the 2.54mm (0.1in) pitch connector makes it easier to connect the 8 PWM outputs to commercially available ESCs. Pixhawk 4 Mini was designed and developed in collaboration with Holybro® and Auterion®. It is based on the Pixhawk FMUv5 design standard and is optimized to run PX4 flight control software.
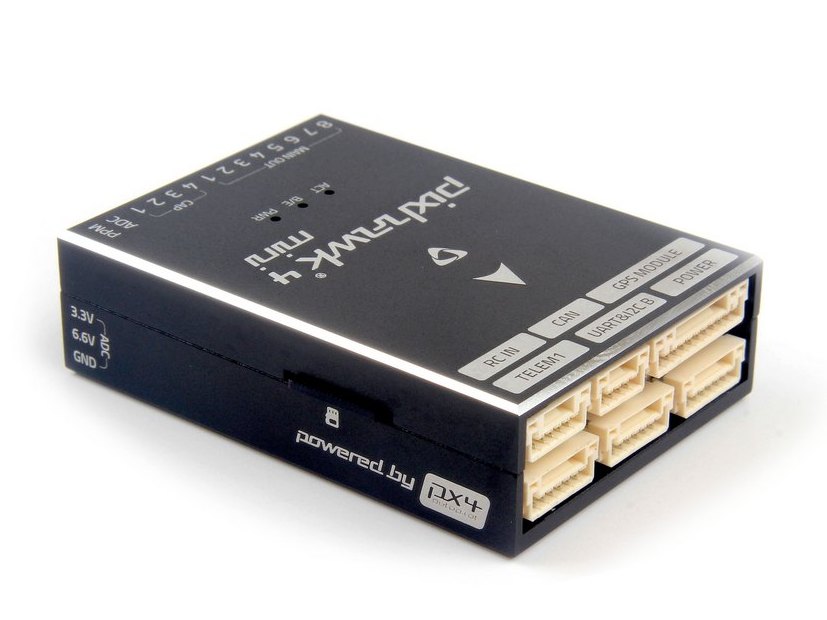 
 Product Features Half the footprint of the Pixhawk® 4 The same FMU processor and memory resources as the Pixhawk 4 Aluminum casing for great thermal performance Easy to connect to commercial ESCs The latest sensor technology from Bosch® and InvenSense® Redundant IMUs for reliable performance NuttX real-time operating system Pre-installed with the most recent PX4 firmware Technical Specifications FMU Processor: STM32F765 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM On-board sensors Accel/Gyro: ICM-20689 Accel/Gyro: BMI055 Mag: IST8310 Barometer: MS5611 GPS: ublox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310 Electrical Data Voltage Ratings Power Brick Input: 4.75~5.5V USB Power Input: 4.75~5.25V Servo Rail Input: 0~24V PDB BEC 5V 3A output UBEC Maximum Input Voltage: 7~42V(10S LiPo) PCB Maximum Continuous Current: 120A Mechanical Data Dimensions: 38x55x15.5mm Weight: 37.2g Package Included (SKU20054) 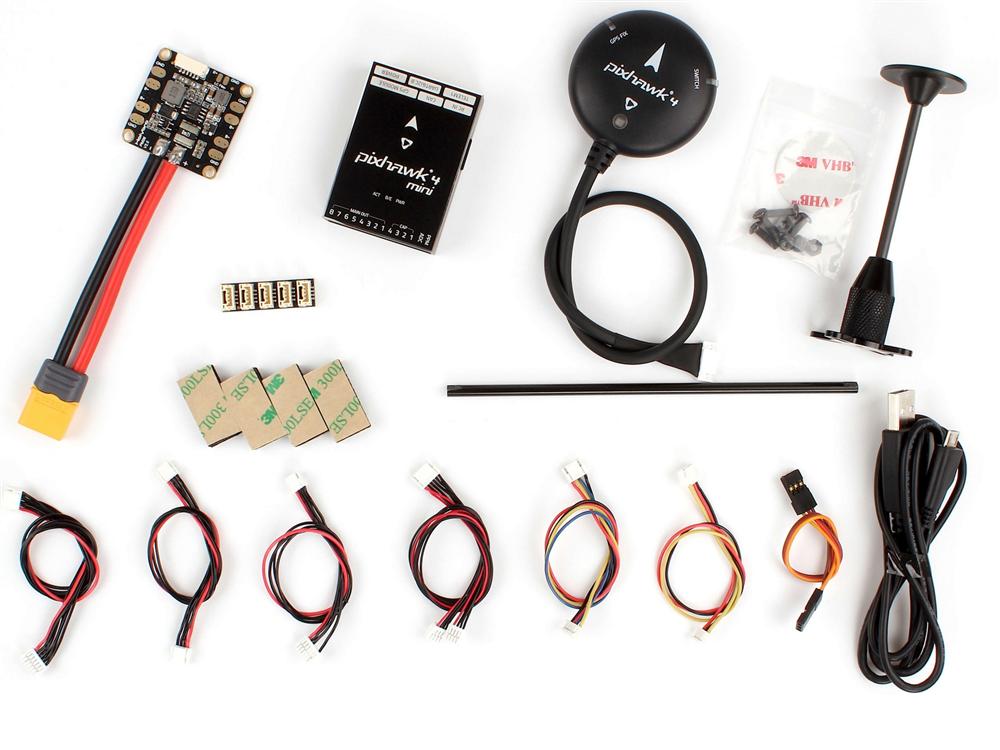 Pixhawk4 mini *1 Pixhawk4 GPS MODULE *1 PM06 V2 Power Management Board *1 I2C splitter Board *1 6 to 6 pin cable (power) *2 4 to 4 pin cable (CAN) *1 6 to 6 pin and 4 pin “Y”cable *1 6 to 6 pin cable(Debug) *1 PPM/SBUS out cable *1 XSR receiver cable *1 DSMX receiver cable *1 SBUS receiver cable *1 USB cable *1 ‘X’type folding pedestal mount *1 70mm & 140mm carbon rod stand off *2 Foam Set *1 Pixhawk4 mini Quick Start Guide *1 | комплект | 11732,00 | ||||||||||||||||||||||||||||||
| HP-FCGPS6M-MP | HP-FCGPS6M-MP Hyperion NEO-6M GPS Module w/Compass for Micro Pixhack | Модуль Hyperion GPS Ublox NEO-6M с компасом для Micro Pixhack (1.25mm 6-pin)Модуль GPS Ublox NEO-6M с компасом в пластиковом кейсе. КомплектацияМодуль GPS - 1 шт Складная пластиковая стойка - 1 шт Hyperion quality products! The Hyperion NEO-6M GPS with compass module brings high performance from the u-blox6 position engine in the miniature NEO form factor. U-blox6 has been designed with low power consumption and low costs in mind. Intelligent power management is a breakthrough for low-power applications. These receivers combine a high level of integration capability with flexible connectivity options in a small package. This makes them perfectly suited for mass-market end products with strict size and cost requirements. The DDC interface provides connectivity and enables synergies with u-blox LEON and LISA wireless modules. Compared with original 6M GPS, the mini version inherits the same high performance, it's more compact in size and specially suitable for smaller size drones. The default signal line is compatible with Micro PixHack pin-out, but can easily converted to be compatible with any APM style Flight Controller. Features: U-blox 6 position engine: -Navigate down to -162 dBm and -148 dBm coldstart -Faster acquisition with AssistNow Autonomous -Configurable power management -Hybrid GPS/SBAS engine (WAAS, EGNOS, MSAS) -Anti-jamming technology Specifications: Receiver type: - 50-channel U-blox 6 engine - GPS L1 C/A code - SBAS: WAAS, EGNOS, MSAS Navigation update rate up to 5 Hz Accuracy - Position 2.5 m CEP - SBAS 2.0 m CEP Acquisition - Cold starts: 27 s - Aided starts: 3s - Hot starts: 1 s Sensitivity - Tracking: -162 dBm -161 dBm - Cold starts: -148 dBm -147 dBm - Hot starts: -157 dBm -156 dBm Power supply 2.7 V - 3.6 V Power consumption 111 mW @ 3.0V (continuous) - 33 mW @ 3.0V Power Save Mode (1 Hz) - 68 mW @ 1.8V (continuous) - 22 mW @ 1.8V Power Save Mode (1 Hz) Operating temp. -40° C to 85° C Supported antennas Active and passive Interfaces - 1 UART - 1 USB V2.0 full speed 12 Mbit/s - 1 DDC (I2C compliant) - 1 SPI Digital I/O - Configurable timepulse - 1 EXTINT input for Wakeup Serial and I/O Voltages: 2.7 - 3.6 V Timepulse Configurable 0.25 Hz to 1 kHz Protocols NMEA, UBX binary, RTCM Simple integration with u-blox wireless modules A-GPS: AssistNow Online and AssistNow Offline services, OMA SUPL compliant Backward compatible (hardware and firmware) Easy migration from NEO-5 family or NEO-4S LCC package for reliable and cost effective manufacturing Compatible with u-blox GPS Solution for Android Based on GPS chips qualified according to AEC-Q100 Manufactured in ISO/TS 16949 certified production sites Qualified according to ISO 16750 Pin Configurations: For APM / PIXHAWK Colour GPS Flight Controller Black GND GND Red +5V +5V Blue SDA SDA Orange SCL SCL Green TX RX Yellow RX TX For CC3D / SP Racing F3 Colour GPS Flight Controller Black GND GND Red +5V +5V Blue RX TX Orange TX RX For NAZE32 / FLIP32 Colour GPS Flight Controller Green GND GND Red +5V +5V Blue RX TX Yellow TX RX Tip: After receiving the NEO6M GPS, because of the large changes in Location, please put in the open area for 1~2 hours. Use it only after downloading the Ephemeris and Stable Position Located. Note: some Mini APM GPS port line is different from us , Please check carefully the pin diagram together with the description of flight controller before powering on. GPSmodule | комплект | 1021,31 | ||||||||||||||||||||||||||||||
| HP-FCGPSM8N-MP | HP-FCGPSM8N-MP Hyperion NEO-M8N GPS Module w/Compass for Micro Pixhack | Модуль Hyperion GPS Ublox NEO-M8N с компасом для Micro Pixhack (1.25mm 6-pin)Модуль GPS Ublox NEO-M8N с компасом в пластиковом кейсе. Один из самых быстрых и точных GPS модулей. В сравнении с предыдущими версиями так же имеет более низкое потребление питания и поддержку спутников Глонасс. Идеально подходит для точных и стабильных полетов по карте на воздушных судах.Подходит для контроллеров полета APM, Pixhawk Особенности Быстрый поиск спутников (10 секунд на поиск 6 спутников в космосе) Встроенный компас i2c HMC5883L с частотой обновления 10Гц Поддержка GPS+BD+SBAS, or GPS+GLONASS+SBAS Встроенный одометр и логгер пройденного пути Характеристики Приемник: 72-канальный u-blox M8 engine Поддерживаемые навигационные системы: GPS; Galileo; GLONASS; BeiDou Интерфейсы подключения: UART; USB; SPI; DDC; I2C Магнетометр: Есть Напряжение питания: 5В Ток потребления: 21 мА Чувствительность: -167 dBm Холодный старт: -148 dBm, 26с Горячий старт: -156 dBm, 2с Диаметр корпуса: 60мм Масса: 18г Black GND Red +5V Blue SDA Orange SCL Green TX Yellow RX Комплектация Модуль GPS - 1 шт Складная пластиковая стойка - 1 шт GPSmodule | комплект | 1568,11 | ||||||||||||||||||||||||||||||
| HP-FCPIX | HP-FCPIX Hyperion Pixhack 32-bit Ultimate Flight Controller | Полетный контроллер Hyperion Pixhack 2.8.4 32-bit Ultimate Flight ControllerHyperion quality products!Основанный на мощной платформе pixhawk с открытым исходным кодом, pixhack 2.8.4 был усовершенствован для обеспечения большего количества функций. Все порты аккуратно смонтированы по бокам, что позволяет горизонтально расположить проводку, а не распределять ее по всему корпусу. Встроенная виброгасящая конструкция обеспечивает постоянную устойчивость летательного аппарата. Features: Independent IMU unit, built-in floating vibration absorbing structure Advanced 32-bit ARM Cortex M4 high performance processor 8 nos PWM/servo output, Support upto 8-axis multi-copters Automatic & manual mode Redundancy power input and malfunction shifting function Multi-color LED Multi-tone Buzzer port Removal of ports like SPKT/DSM, CAN Procedure based on pixhawk, with variety of functions Ports like GPS/TELEM/POWER are the same as APM 2.5/2.6/2.8 Flight data logginh with Micro SD card Specifications: 32-BIT 2MB cache STM32F427 Cortex M4,with FPU. Basic frequency: 168MHZ, 256K RAM 32-BIT STM32F103 backup coprocessor L3GD20 3-axis 16-bit digital GYRO LSM303D 3-axis 14-bit accelerometer/magnetometer MPU6000 6-axis accelerometer/magnetometer MS5611 high precision barometer Size: 69x45x16mm Weight: 33g Connector Ports: Futaba SBUS support PPM signal input PWM signal output I2C port(1.25mm spacing, 4pin, JST) x 1 Telemetry prots(1.25mm spacing, 5pin JST) x 2 Powermodule port(1.25mm spacing, 6pin JST) x 1 GPS port(1.25mm spacing, 5pin JST) x 1 Included with the package: Pixhack 2.8.4 flight controller x 1 Safety switch x 1 Buzzer x 1 Micro SD card x 1 SD card reader x 1 Cables x 2 *PX4/Pixhawk is an independent, open-source, open-hardware project aiming at providing a high-end autopilot to the academic, hobby and industrial communities (BSD licensed) **The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. | комплект | 3352,00 | ||||||||||||||||||||||||||||||
| HP-FCPIXRACER1 | HP-FCPIXRACER1 Hyperion Pixhack Racer Autopilot V1.0 Flight Controller w/WiFi module | Полетный контроллер Hyperion Pixhack Racer (PIXRACER) Autopilot V1.0 с модулем WiFi в комплектеHyperion quality products!The new Hyperion Pixhack Racer is available now and its fully supported by the Arducopter and PX4 community. Its a genuine open source project, already running with PX 4 stack software / QGroundControl (QGC), as well with Arducopter / Mission Planner (MP). This is not just another small PX4 knock off or derivate, the Pixracer is the first autopilot of the new FMUv4 Pixhack generation. Its coming with an upgraded Invensense Sensor generation (bye bye tricky LSM 303), a plug in Wifi board and a 2MB Flash. JST GH series connectors for easy and robust peripheral connections. Full set of professional flexible silicone cables included for almost any peripheral module connection. Features: Integrated Wifi telemetry and boot loading through ESP8266 Invensense ICM-20608 Accel / Gyro (4 KHz) Invensense MPU9250 Accel / Gyro / Mag (4 KHz) Honeywell HMC5983 magnetometer with temperature compensation Measurement Specialties MS5611 barometer JST GH connectors MicroSD slot Futaba S.BUS and S.BUS2 / Spektrum DSM2 and DSMX / Graupner SUMD / PPM input / Yuneec ST24 FrSky telemetry port OneShot PWM out (configurable) Specifications: MCU: STM32F427VIT6 rev.3 PCB dimension: 36mm*36mm FRAM: FM25V02-G Ultra low noise LDOs for sensors and FMU MPU9250, ICM20608, baro MS5611, mag HMC5983 Connectors: GPS+I2C, RC-IN, PPM-IN, RSSI, SBus-IN, Spektrum-IN, USART3 ( TxD, RxD, CTS, RTS ), USART2 ( TxD, RxD, CTS, RTS ), FRSky-IN, FRSky-OUT, CAN, USART8 ( TxD, RxD ), ESP8266 ( full set ), SERVO1-SERVO6, USART7 ( TxD, RxD ), JTAG ( SWDIO, SWCLK ), POWER-BRICK ( VDD, Voltage, Current, GND ), BUZZER-LED_BUTTON MicroSD card reader RGB LED Micro USB WiFi ESP8266 802.11bgn (Included!) | комплект | 2845,85 | ||||||||||||||||||||||||||||||
| JHE42B-S | JHE42B-S Finder 5V Buzzer 100dB with LED Alarm Built in battery For RC FPV Drone | Звуковой поисковый автономный маяк-пищалка 18x17x15мм с ярким светодиодом и LiPo аккумулятором, для гоночных дронов и пр.Совместим с полетными контроллерами на Betaflight, Cleanflight и пр. и работает как штатная пищалкаАвтоматически включает звуковую сигнализацию через 30 сек после отключения питания (в случае отстыковки силового аккумулятора остается в рабочем состоянии). Сигнализация отключается нажатием на клавишу более 2 сек. Время автономной работы: до 3 часов 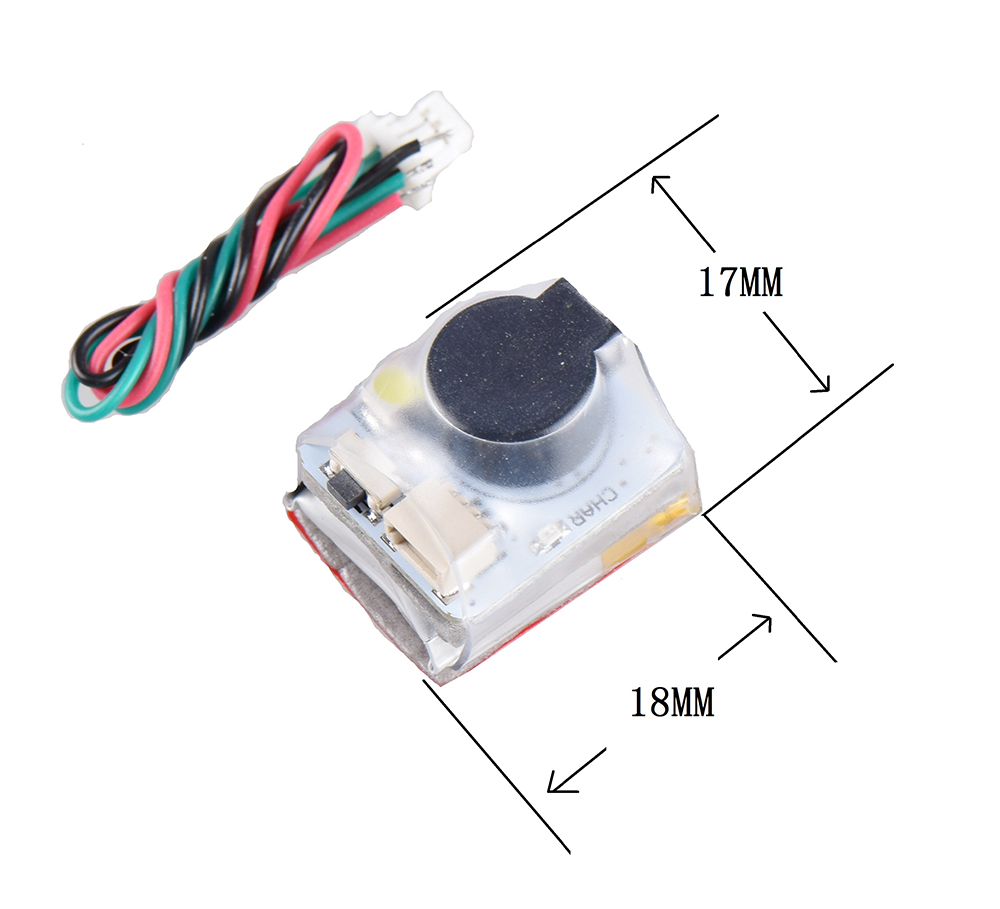
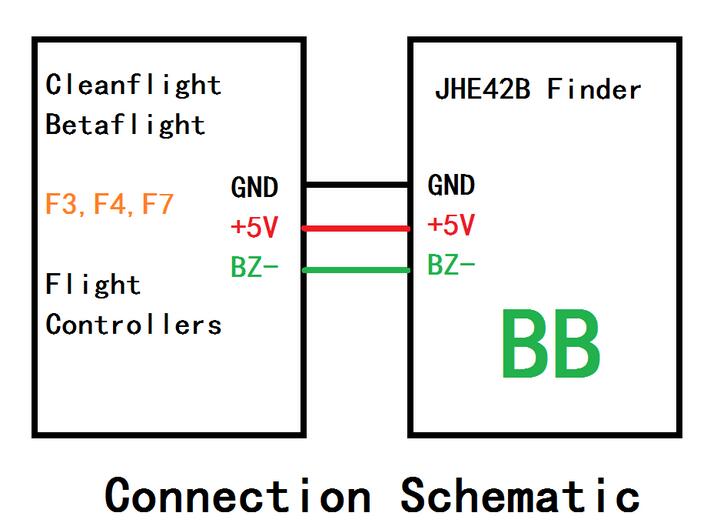 Характеристики: Встроенный аккумулятор и LED светодиод Громкость: 100dB Аккумулятор: 75mAh LiPo Питание: 5В Размеры: 18*17*15мм Масса: 4.3г Комплектация: 1x Buzzer 1x 3P 1.0mm Cable | шт. | 419,00 | ||||||||||||||||||||||||||||||
| JST-GH-FF6p-w15 | JST-GH 1.25mm (6pin) Female Double Connector w/28AWG Wire 150mm [JST-GH-FF6p-w15] | Кабель соединительный JST-GH 1.25mm 6-контактный с фиксатором, 15смПодходит для Pixhawk2.1, Pixhack и пр., но нужно соблюдать цоколевку по инструкции к полетному контроллеру! | шт. | 62,85 | ||||||||||||||||||||||||||||||
| MTKS-ASPD-4525 | Matek ASPD-4525 Digital Airspeed Sensor Kit w/Pitot tube [MTKS-ASPD-4525] | Датчик воздушной скорости цифровой Matek ASPD-4525 для Ardupilot Pixhawk, InavЦифровой датчик воздушной скорости является более точным методом для полетного контроллера определить воздушную скорость, в сравнении с путевой скоростью GPS. Датчик MS4525DO предназначен для измерения положительного и отрицательного давления.Включенная в комплект трубка Пито для измерения избыточного, дифференциального давления идеально подойдет для установки на большинство авиамоделей. Характеристики Протокол обмена: I2C (SCL & SDA) Датчик: MS4525DO Напряжение питания: 4-6 В Ток потребления: 5 мА Разрешение датчика давления: 14бит Температурная компенсация: Есть Максимальное давление: 20 PSI (137.9kPa) Рабочие температуры: -40°C ~ 125°C Точность: ±0.25% SPAN Red LED: Индикатор питания JST-GH распиновка: 5V, SCL, SDA, GND Вес: 3.5г (сам датчик) 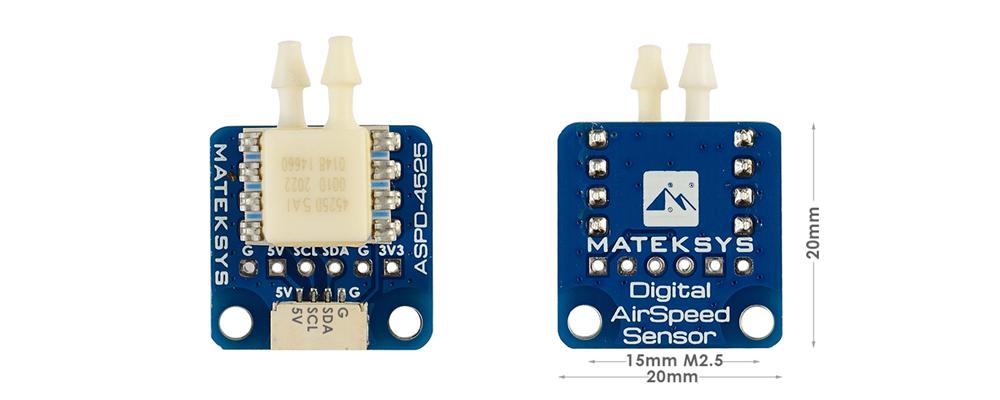 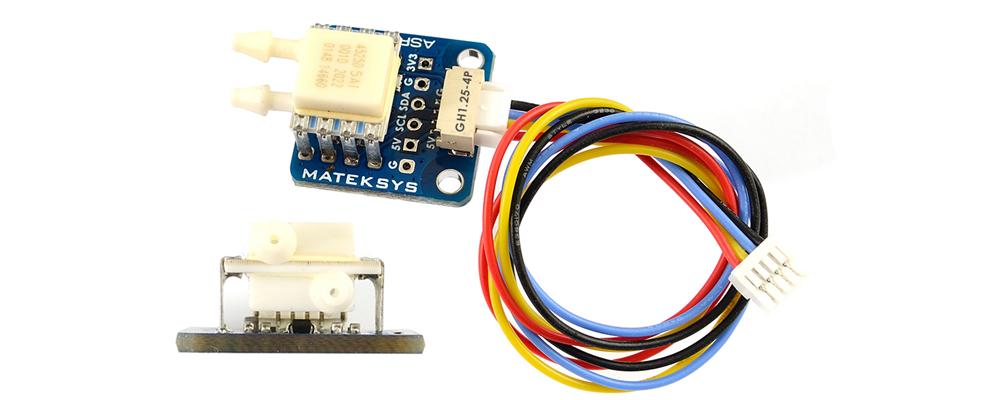  Комплектация Датчик - 1 шт Трубка Пито - 1 шт Соединительная трубка 40см - 1 шт 4х жильный кабель шины I2C JST-GH-4P to JST-GH-4P Подключение: 5V to FC 4~6V SCL to FC I2C_SCL SDA to FC I2C_SDA G to FC GND | комплект | 2074,05 | ||||||||||||||||||||||||||||||
| MATEK-F405-CTR | Matek F405-CTR Flight Controller Built-in PDB OSD 5V/2A BEC Current Sensor for RC Drone | Полетный контроллер Matek Systems F405-CTR STM32F405, MPU6000, BMP280, BFOSD, SD Card Slot, VCP+5x UARTs, PDB, Current Sensor 184A, BEC 5V/2A для мультикоптеров.Характеристики:Brand name: Matek Systems Item name: BetaFlight F405-CTR Size: 36x46mm PCB with 30.5mm mounting holes Weight: 10g http://www.mateksys.com/?portfolio=f405-ctr#tab-id-1 
 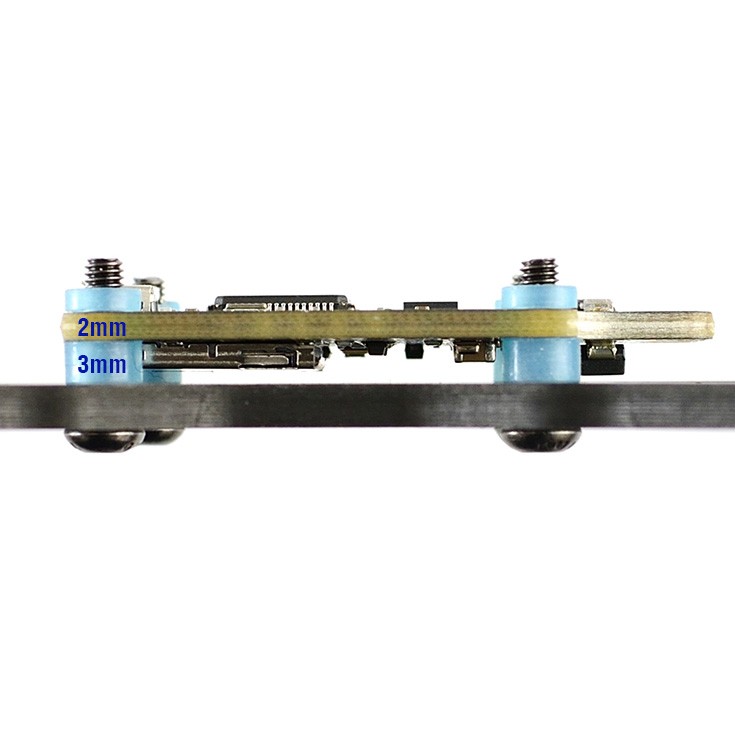
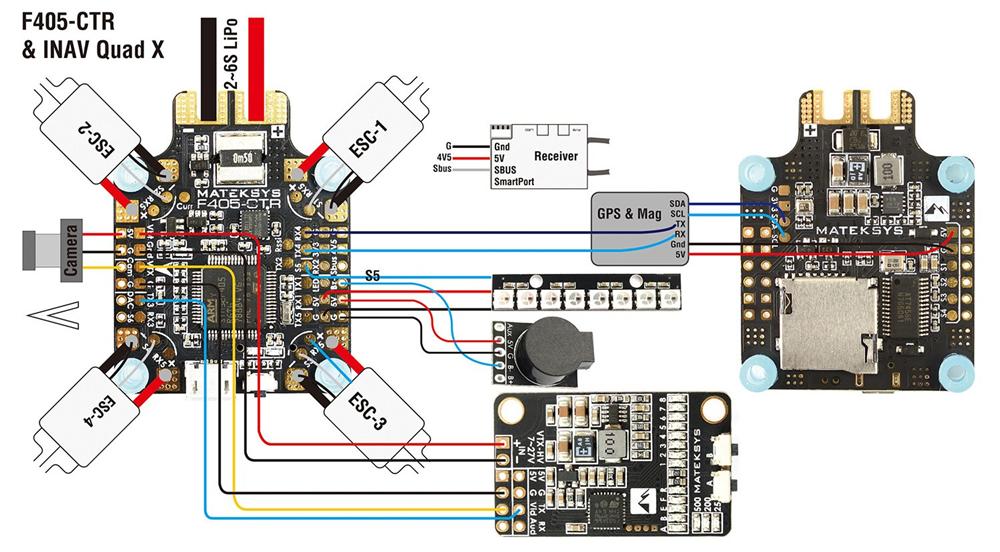 Характеристики FC: MCU: 168MHz STM32F405 IMU: MPU6000 accelerometer/gyro (SPI) Baro: BMP280 (I2C) OSD: BetaFlight OSD w/ AT7456E chip Blackbox: MicroSD card slot (SD/SDHC) VCP, UART1, UART2, UART3, UART4, UART5 Built in inverter for SBUS input (UART2-RX) PPM/UART Shared: UART2-RX SoftSerial on TX2, S5 or S6 optional Camera control on S6 or DAC optional Smartaudio & Tramp VTX protocol supported WS2812 Led Strip : Yes Beeper : Yes RSSI: Yes Характеристики PDB: Input: 6~30V (3~6S LiPo) w/TVS protection PDB: 4x30A (Max.4x46A), 6 layers*2oz copper PCB BEC: 5V 2A cont. (Max.3A) LDO 3.3V: Max.300mA for Spektrum RX Current Sensor 184A (Scale 179) Battery Voltage Sensor: 1:10 (Scale 110) Особенности: 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red) 6x PWM / DShot outputs without conflict 5x UARTs 1x Group of G/S1/S2/S3/S4 pads for 4in1 ESC Signal/GND 4x pairs of corner pads for ESC Signal/GND connections (DSHOT compatible) 1x pair I2C1 pads 1x Side-press button for BOOT(DFU) mode package included: 1x Matek Systems BetaFlight F405-CTR 1x Rubycon ZLH 35V/470uF (Low ESR) 6x silicon grommets M4 to M3 1x FR4 PCB Plate 36*36*1mm | шт. | 1960,38 | ||||||||||||||||||||||||||||||
| MATEK-F405-WING | Matek F405-WING (New) STM32F405 Flight Controller Built-in OSD for RC Airplane Fixed Wing | Полетный контроллер Matek Systems F405-WING STM32F405, MPU6000, INAVOSD, BMP280, 6x UARTs, 1x Softserial, 2x I2C, 2x Motors & 7x Servos, 4x BEC & current sensor on board для моделей самолетовOfficial website: http://www.mateksys.com/?portfolio=f405-wing#tab-id-3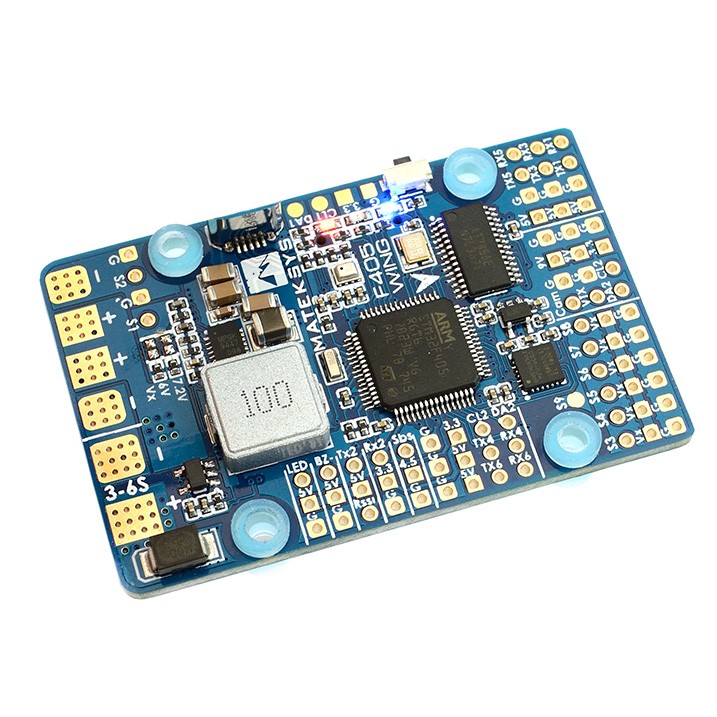
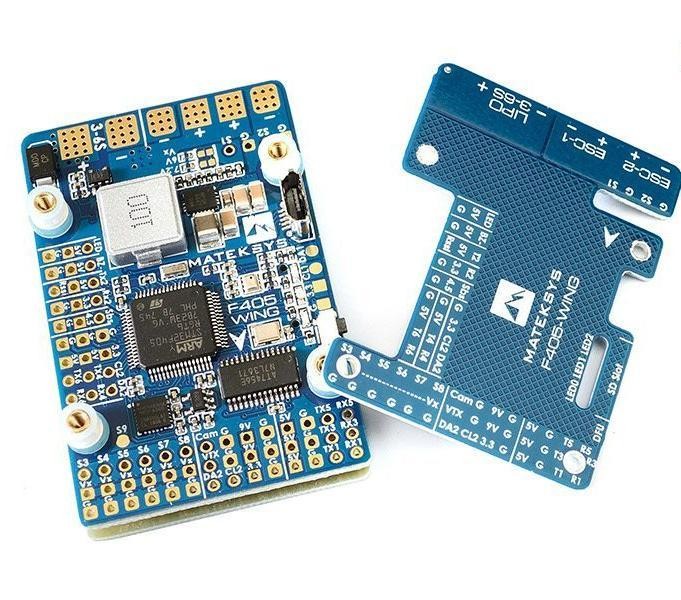 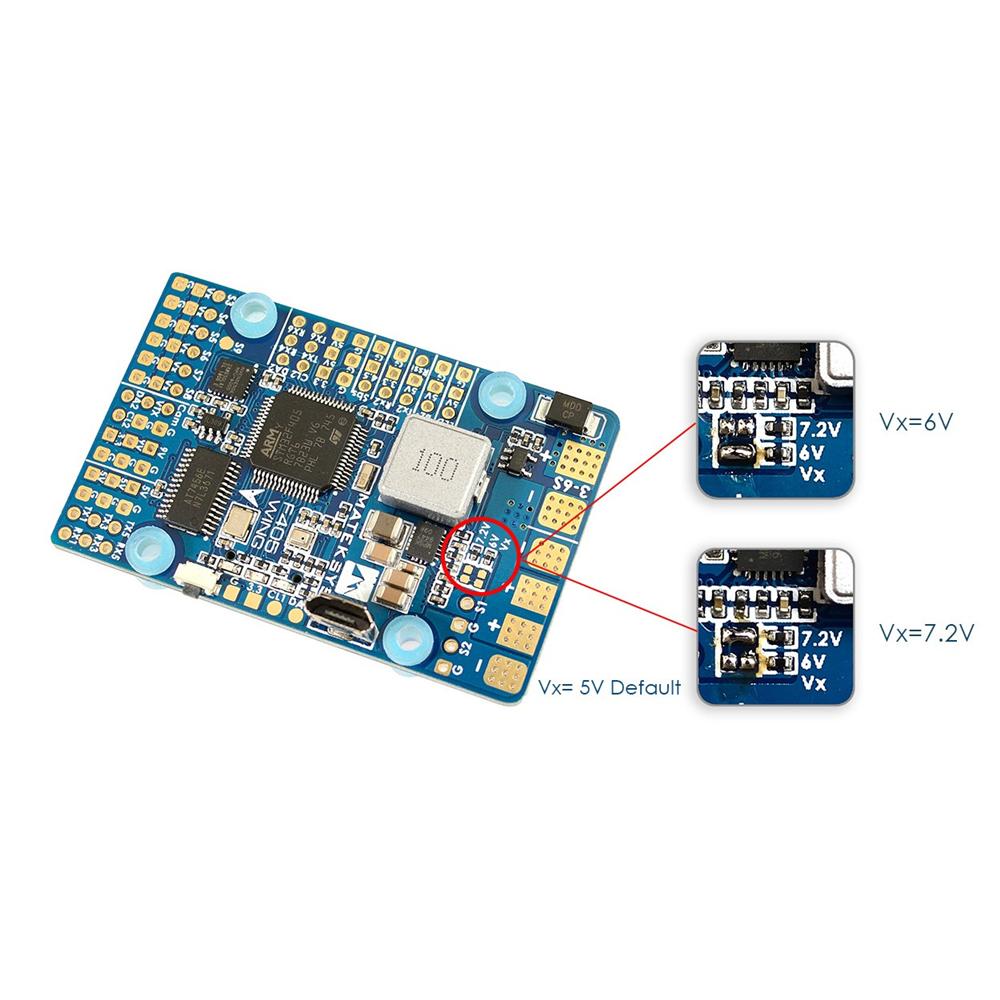
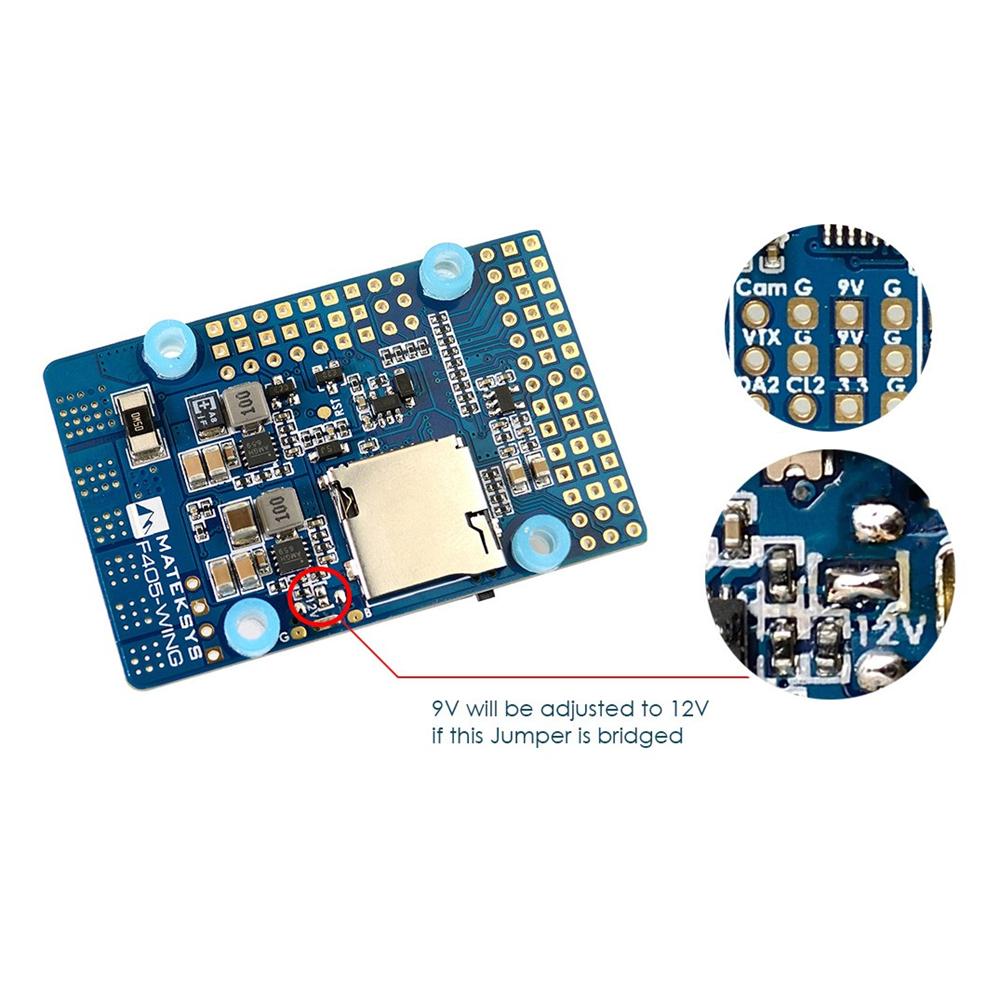 
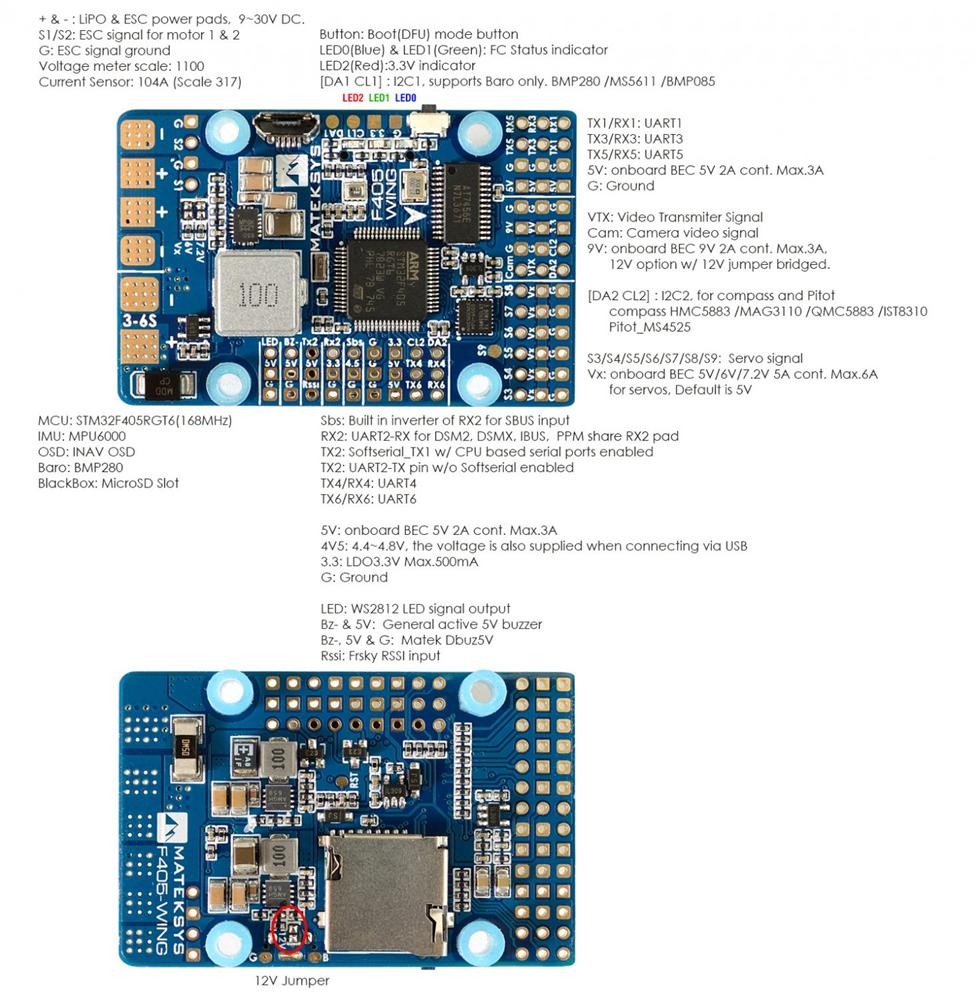 Характеристики: MCU: 168MHz STM32F405 IMU: MPU6000 accelerometer/gyro (SPI) Baro: BMP280 (I2C) OSD: INAV OSD w/ AT7456E chip Blackbox: MicroSD card slot (SD/SDHC) VCP & 6x UARTs 2x Motors, 7x Servos outputs 2x I2C 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red) Built in inverter for SBUS input (UART2-RX) PPM/UART Shared: UART2-RX SoftSerial on TX2 pad Battery Voltage Sensor: 1:10 (Scale 1100) WS2812 Led Strip : Yes Beeper : Yes RSSI: Yes Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm Dimensions: 56 x 36 x 13 mm Weight: 25g FC Firmware: INAV Flight Target: MATEKF405SE PDB: Input voltage range: 9~30V (3~6S LiPo) w/TVS protection 2x ESC power pads Current Senor: 104A, 3.3V ADC, Scale 317 BEC 5V output: Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed Continuous current: 2 Amps, Max.3A BEC 9V /12V output: Designed for Video Transmitter, Camera, Gimbal ect. Continuous current: 2 Amps, Max.3A 12V option with Jumper pad BEC Vx output: Designed for Servos Voltage adjustable, 5V Default, 6V or 7.2V via jumper Continuous current: 5 Amps, Max.6A Output Ripple: 50mV (VIn=24V, VOut=5V@5A load) BEC 3.3V output: Designed for Baro / Compass module and Spektrum RX Linear Regulator Continuous current: 500mA Package included: 1 x Matek Systems F405-WING(New) STM32F405 Flight Controller Built-in OSD for RC Drone | шт. | 2450,61 | ||||||||||||||||||||||||||||||
| MATEK-F411-WING | Matek F411-WING (New) STM32F411 Flight Controller Built-in OSD for RC Airplane Fixed Wing | Полетный контроллер Matek Systems F411-WING STM32F411, MPU6000, OSD, BMP280, 2x UARTs, 1x Softserial, 1x I2C, 2x Motors & 5x Servos, 2x BEC & current sensor on board для моделей самолетовOfficial website: http://www.mateksys.com/?portfolio=f411-wing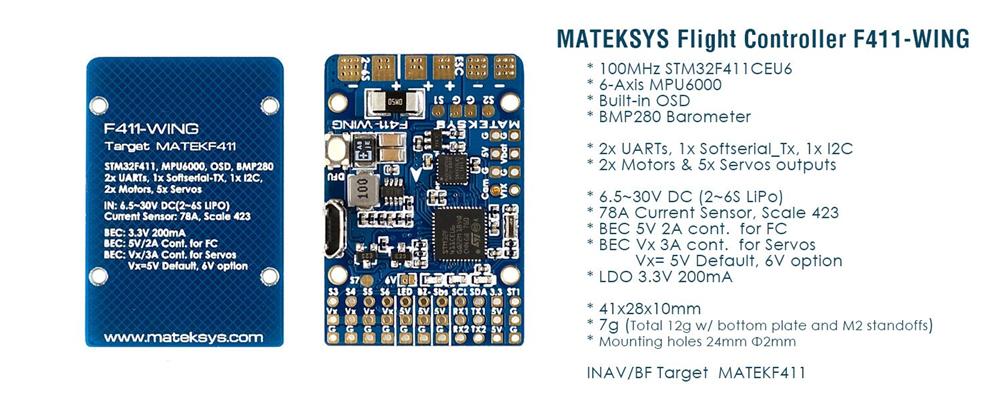
 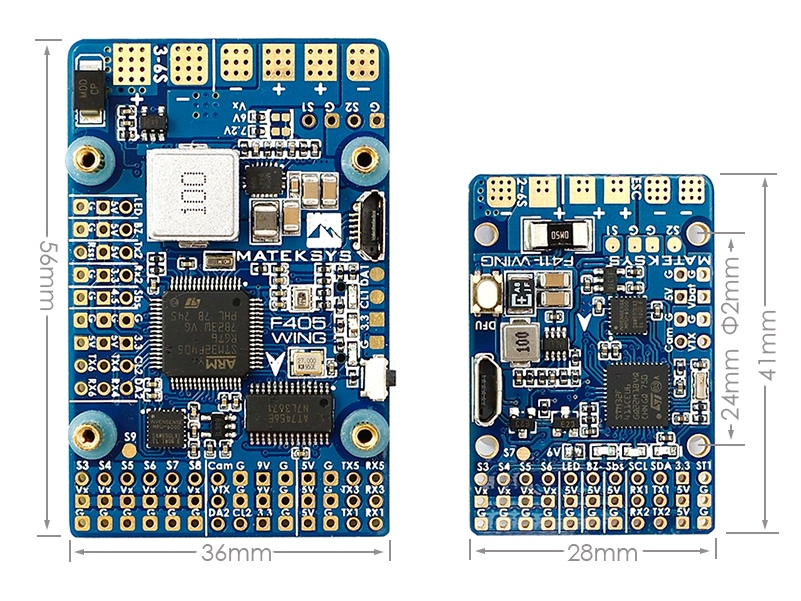
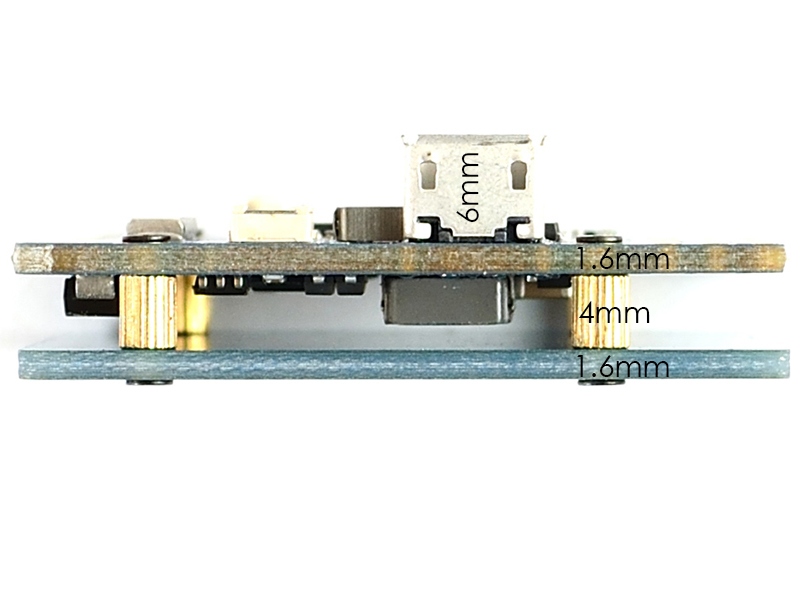 
 Характеристики: MCU: 100MHz STM32F411 IMU: MPU6000 accelerometer/gyro (SPI) Baro: BMP280 (I2C) OSD: INAV OSD w/ AT7456E chip Blackbox: No VCP & 2x UARTs 2x Motors, 5x Servos outputs 1x I2C 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red) Built in inverter for SBUS input (UART1-RX) SoftSerial_Tx1: ST1 pad by default PPM: ST1 pad with softserial disabled Battery Voltage Sensor: 1:10 (Scale 1100) WS2812 Led Strip : Yes Beeper : Yes RSSI: No FC Firmware INAV Flight Target: MATEKF411 PDB Input voltage range: 6.5~30V (2~6S LiPo) w/TVS protection 2x ESC power pads Current Senor: 78A, 3.3V ADC, Scale 423 BEC 5V output Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed Continuous current: 2 Amps BEC Vx output Designed for Servos Voltage adjustable, 5V Default, 6V via jumper Continuous current: 3 Amps BEC 3.3V output Designed for Baro / Compass module/ OLED and Spektrum RX Linear Regulator Continuous current: 200mA Physical Mounting: 24 x 24mm, Φ2mm Dimensions: 41 x 28 x 10mm Weight: 7g (Total 12g w/ bottom plate and M2 standoffs) Package included: 1 x Matek Systems F411-WING(New) STM32F411 Flight Controller Built-in OSD for RC Drone | шт. | 1675,48 | ||||||||||||||||||||||||||||||
| MTKS-F411-WSE | Matek F411-WSE STM32F411 Flight Controller Built-in OSD for RC Airplane Fixed Wing | Полетный контроллер Matek Systems F411-WSE STM32F411, MPU6000, OSD, BMP280, 2x UARTs, 2x Softserial_TX, I2C, 2x Motors & 4x Servos, Camera switch, 2x BEC & current sensor on board для моделей самолетовOfficial website: http://www.mateksys.com/?portfolio=f411-wse
  Характеристики: MCU: 100MHz STM32F411CEU6 IMU: MPU6000 (SPI) Baro: BMP280 (I2C) OSD: AT7456E (SPI) Blackbox: No 2x Uarts 2x Softserial-Tx 2x Motors, 4x Servos outputs 1x I2C 4x ADC (VBAT, Current, RSSI, AirSpeed) 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red) Switchable Dual Camera Inputs TR/SA VTX control: Yes WS2812 Led control : Yes Beeper output: Yes RSSI: Yes Voltage divider for Analog Airspeed sensor: Yes FC Firmware INAV Target: MATEKF411SE PDB Input voltage range: 6~30V (2~6S LiPo) 2x ESC power pads Battery Voltage Sensor: 1:10 (Scale 1100) Current Senor: 78A, 3.3V ADC, Scale 423 BEC 5V output Designed for Flight controller, Receiver, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed module Continuous current: 2 Amps, Max.3A(5seconds/minute) BEC Vx output Designed for Servos Voltage adjustable, 5V Default, 6V option Continuous current: 3.5 Amps, Max.5A(5seconds/minute) BEC 3.3V output Designed for Baro / Compass module/OLED and Spektrum RX Linear Regulator Continuous current: 200mA Physical Mounting: 24 x 24mm, Φ2mm Dimensions: 28 x 28 x 14 mm Weight: 8.5g Package included: 1 x Matek Systems F411-WSE STM32F411 Flight Controller Built-in OSD for RC Drone | шт. | 1675,48 | ||||||||||||||||||||||||||||||
| MATEK-F765-WING | Matek F765-WING STM32F765VI Flight Controller Built-in OSD for RC Airplane Fixed Wing | Полетный контроллер Matek Systems F765-WING STM32F765VI, MPU6000 & ICM20602, AT7456E OSD, BMP280, 7x UARTs, 1x Softserial, 2x I2C, 12x PWM out (10x DSHOT), 6x ADC, 4x BEC & current sensor on board для моделей самолетовOfficial website: http://www.mateksys.com/?portfolio=f765-wing
 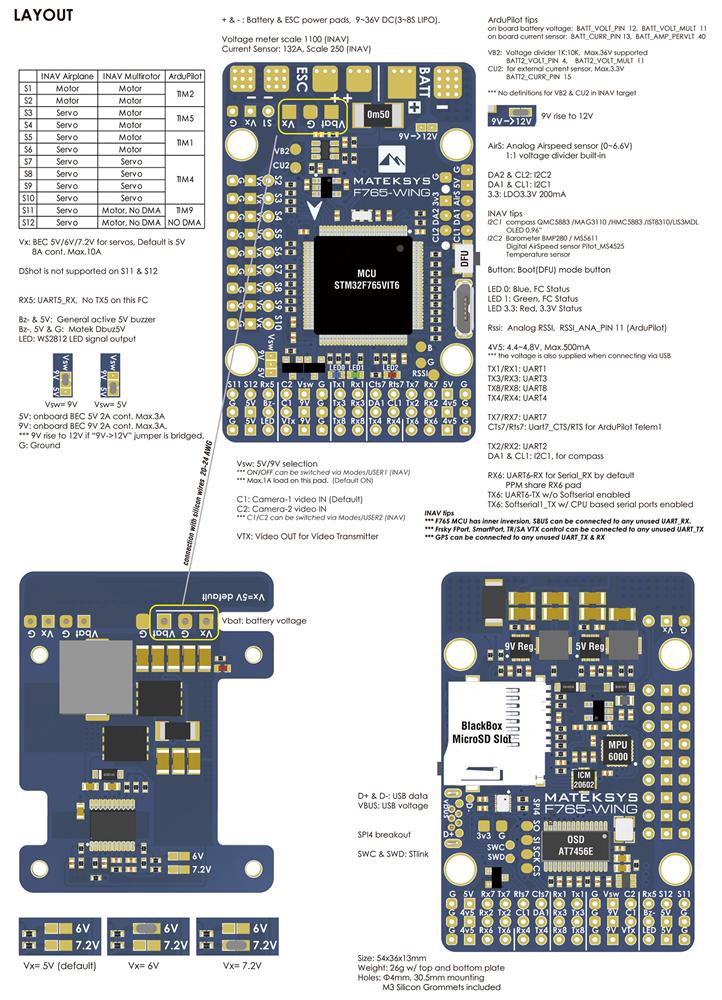
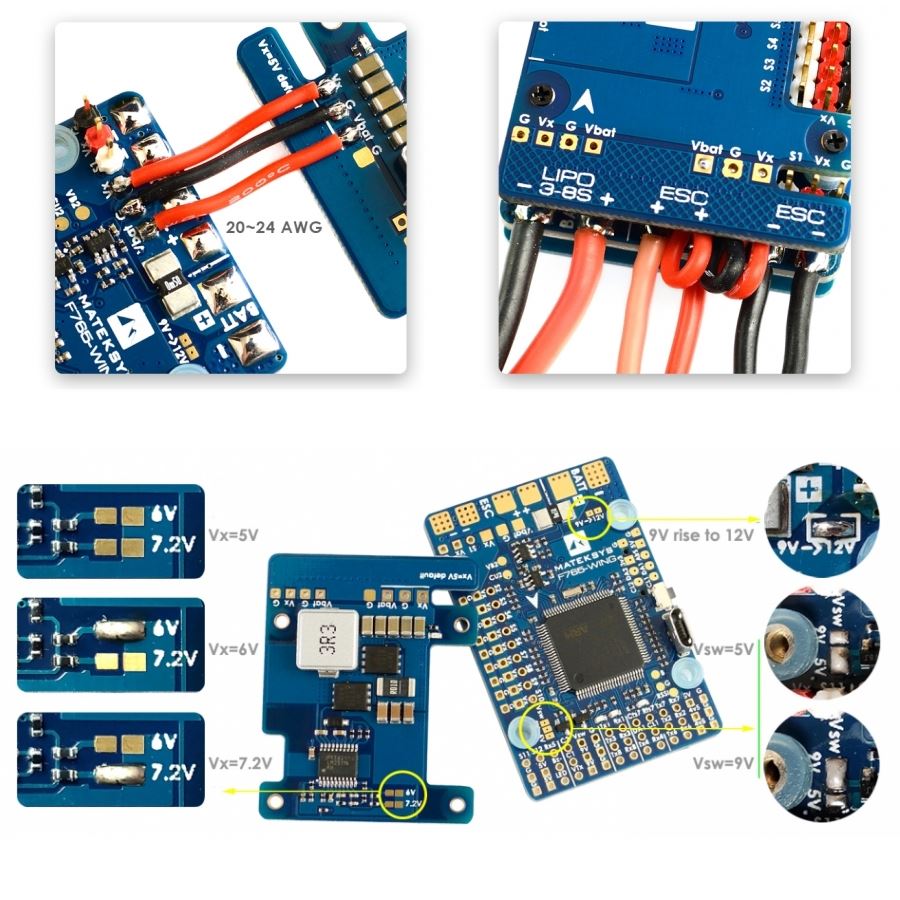 Характеристики: MCU: STM32F765VIT6, 216MHz , 512KB RAM, 2MB Flash IMU: MPU6000 (SPI1) & ICM20602 (SPI3) Baro: BMP280 (I2C2) OSD: AT7456E (SPI2) Blackbox: MicroSD card slot (SDIO) 7x Uarts (1,2,3,4,6,7,8) with built-in inversion. 1x Softserial1_Tx (INAV) 12x PWM outputs (S1~S10 support Dshot) 6x ADC (VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2) 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red) 2x I2C 1x SPI4 break'out Switchable Dual Camera Inputs Switchable 5V/9V(12V) for Camera/VTX High-precision Current Sense ADC VB2 voltage divider: 1K:10K ADC AirSpeed voltage divider: 10K:10K TR/SA VTX control: Yes WS2812 Led Strip : Yes Beeper : Yes RSSI: Yes Analog Airspeed sensor: Yes Digital Airspeed sensor: Yes FC Firmware: INAV Target: MATEKF765 ArduPilot(ChiBiOS) Target: MATEKF765-WING PDB: Input voltage range: 9~36V (3~6S LiPo) w/TVS protection 2x ESC power pads Battery Voltage Sensor: 1:10 (Scale 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot) Current Senor: 132A, 3.3V ADC (Scale 250 in INAV, 40 A/V in ArduPilot) BEC 5V output: Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed Continuous current: 2 Amps, Max.3A BEC 9V /12V output: Designed for Video Transmitter, Camera, Gimbal ect. Continuous current: 2 Amps, Max.3A 12V option with Jumper pad BEC Vx output: Designed for Servos Voltage adjustable, 5V Default, 6V or 7.2V via jumper Continuous current: 8 Amps, Max.10A BEC 3.3V output: Designed for Baro / Compass module and Spektrum RX Linear Regulator Continuous current: 200mA Physical: Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm Dimensions: 54 x 36 x 13 mm Weight: 26g Package included: 1 x Matek Systems F765-WING STM32F765VI Flight Controller Built-in OSD for RC Airplane Fixed Wing | шт. | 3404,38 | ||||||||||||||||||||||||||||||
| MATEK-M8Q-5883 | Matek M8Q-5883 GPS & Compass Module | Миниатюрный модуль GPS Matek Systems M8Q-5883 с компасомМодуль Matek SAM-M8Q со встроенным магнетометром QMC5883L, оснащен оригинальным чипом UBlox M8 и поддерживет системы позиционирования и навигации GPS/ГЛОНАСС/BDS/Galileo/QZSS/SBAS.Встроенная GNSS RHCP патч антенна обеспечивает наилучший компромисс между производительностью и небольшим размером, специально для монтажа в БПЛА, роботов, RC, FPV или другие проекты. Подходит для использования с INAV и другими прошивками. 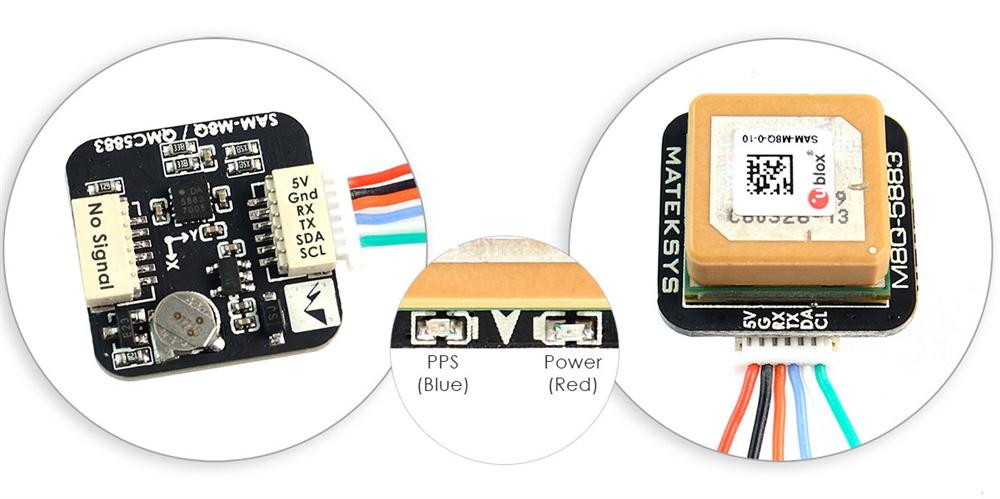
 Особенности Встроенный магнетометр (компас) QMC5883L 72-канальный u-blox M8 модуль с поддержкой нескольких систем геопозирования одновременно, таких как L1C / A, SBAS L1C / A, QZSS L1C / A, QZSS L1 SAIF, GLONASS L1OF, Galileo E1B / C Встроенный стабилизатор напряжения 3.3V с низким уровнем шума и RF-фильтр для блокировки шума Дополнительный усилитель LNA для оптимизации производительности и фронтальный ПАВ-фильтр для повышения помехоустойчивости Низкое энергопотребление Встроенная керамическая патч антенна GNSS RHCP 15 x 15 мм Аккумулятор для горячего старта GPS модуля Светодиодный индикатор питания (красный) и индикатор импульсов времени (синий) Поддерживается INAV / Betaflight / Ardupilot и т. д. Характеристики Максимальная скорость обновления навигации: Единая GNSS: до 18Hz 2 параллельные GNSS (GPS и ГЛОНАСС): до 10Hz Горизонтальная точность положения (GPS и ГЛОНАСС): 2.5м CEP Точность скорости: 0.05 м/с Скорость передачи данный: 9600 бит/сек Холодный старт: 26 сек Автоматические холодные запуски: 2 сек Горячий старт: 1 сек Чувствительность Отслеживание и навигация: -165 dBm Обновление данных: -158 dBm Холодный старт: -146 dBm Горячий старт: -155 dBm Диапазон входного напряжения: 4~6V Интерфейс: UART (TX, RX) Размеры: 20 x 20 x 7.5мм Вес: 7г Комплектация 1 x модуль Matek M8Q/QMC5883 1 х коннектор SH1.0 6P 15см 1 х прозрачная термоусадка Рекомендации GPS, GLONASS, SBAS, QZSS включены по умолчанию По умолчания скорость обновления 1Hz и скорость передачи 9600 бит/сек Синий мигающий светодиод PPS (1Hz) означает трехмерное фиксирование Скорость передачи (baud) 9600 ~ 115200 поддерживается прошивками INAV / BF / Ardupilot Скорость обновления 5Hz с протоколом INAV UBLOX Скорость обновления 10Hz с протоколом INAV UBLOX7 Ориентация компаса при установке стрелкой вперед: INAV/BF: CW 270° Flip Ardupilot/Mission Planner: Rotation None BF не поддерживает фиксацию позиции GPS и RTH, режим GPS Rescue поддерживается в BF3.5 или более поздними версиями Царапины на поверхности керамической антенны являются следствием точной настройки антенны в ublox GPSmodule | шт. | 1549,88 | ||||||||||||||||||||||||||||||
| MATEK-SAM-M8Q | Matek SAM-M8Q GPS Module | Миниатюрный модуль GPS Matek Systems SAM-M8QМодуль Matek SAM-M8Q оснащен оригинальным чипом UBlox M8 и поддерживет системы позиционирования и навигации GPS/ГЛОНАСС/BDS/Galileo/QZSS/SBAS.Встроенная GNSS RHCP патч антенна обеспечивает наилучший компромисс между производительностью и небольшим размером, специально для монтажа в БПЛА, роботов, RC, FPV или другие проекты. Подходит для использования с INAV и другими прошивками. 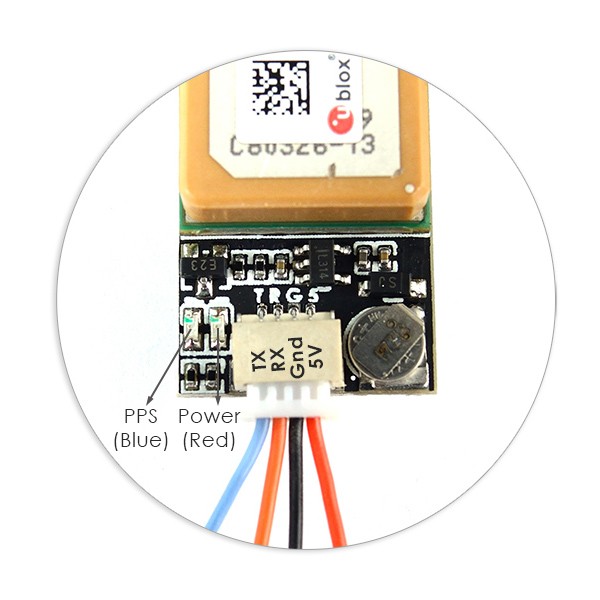
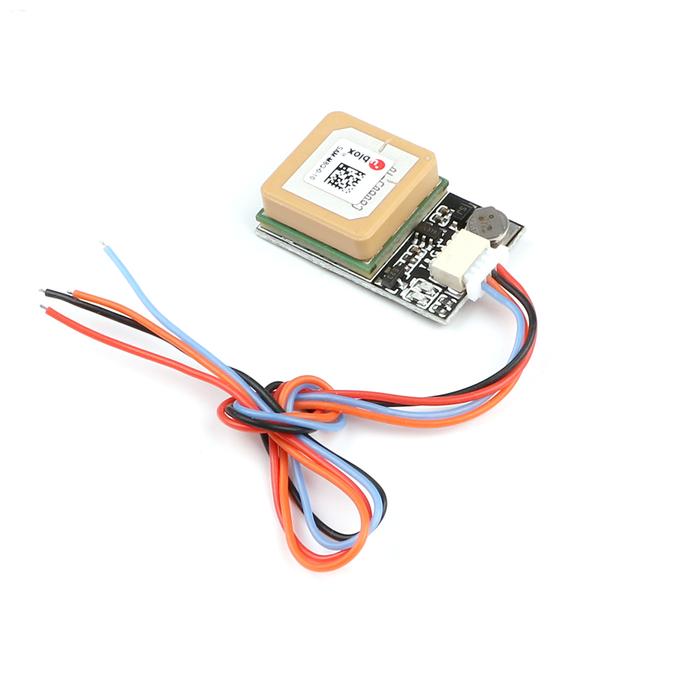 Особенности 72-канальный u-blox M8 модуль с поддержкой нескольких систем геопозирования одновременно, таких как L1C / A, SBAS L1C / A, QZSS L1C / A, QZSS L1 SAIF, GLONASS L1OF, Galileo E1B / C Встроенный стабилизатор напряжения 3.3V с низким уровнем шума и RF-фильтр для блокировки шума Дополнительный усилитель LNA для оптимизации производительности и фронтальный ПАВ-фильтр для повышения помехоустойчивости Низкое энергопотребление Встроенная керамическая патч антенна GNSS RHCP 15 x 15 мм Аккумулятор для горячего старта GPS модуля Светодиодный индикатор питания (красный) и индикатор импульсов времени (синий) Поддерживается INAV / Betaflight / Ardupilot и т. д. Характеристики Максимальная скорость обновления навигации: Единая GNSS: до 18Hz 2 параллельные GNSS (GPS и ГЛОНАСС): до 10Hz Горизонтальная точность положения (GPS и ГЛОНАСС): 2.5м CEP Точность скорости: 0.05 м/с Скорость передачи данный: 9600 бит/сек Холодный старт: 26 сек Автоматические холодные запуски: 2 сек Горячий старт: 1 сек Чувствительность Отслеживание и навигация: -165 dBm Обновление данных: -158 dBm Холодный старт: -146 dBm Горячий старт: -155 dBm Диапазон входного напряжения: 4~6V Интерфейс: UART (TX, RX) Размеры: 26 x 16 x 7.5мм Вес: 7г Комплектация 1 x модуль Matek SAM-M8Q 1 х коннектор SH1.0 4P 15см 1 х прозрачная термоусадка Рекомендации GPS, GLONASS, SBAS, QZSS включены по умолчанию По умолчания скорость обновления 1Hz и скорость передачи 9600 бит/сек Синий мигающий светодиод PPS (1Hz) означает трехмерное фиксирование Скорость передачи (baud) 9600 ~ 115200 поддерживается прошивками INAV / BF / Ardupilot Скорость обновления 5Hz с протоколом INAV UBLOX Скорость обновления 10Hz с протоколом INAV UBLOX7 BF не поддерживает фиксацию позиции GPS и RTH, режим GPS Rescue поддерживается в BF3.5 или более поздними версиями Царапины на поверхности керамической антенны являются следствием точной настройки антенны в ublox GPSmodule | шт. | 1382,28 | ||||||||||||||||||||||||||||||
| Mauch-004 | Mauch 004: PL-200/8 HV Sensor Board with CFK enclosure 2-14S LiPo | Mauch Electronics 004 PL-200/8 HV 200A датчик тока с пластиково-карбоновым корпусом, основан на Allegro Hall Sensor ACS758-200U.Два диапазона для измерений напряжения, выбор при помощи запайки перемычки на плате: замкнуто - до 7S (30В) или разомкнуто - до 14S LiPo (60В).Плата нуждается в питании 5В (4.95-5.05V) К датчику подпаяны силовые плюсовые провода 2x15cm AWG8 (red) Плата поставляется без соединительных кабелей Датчик может быть подключен непосредственно к BEC серии Mauch Premium-Line или Mauch Sensor Hub X2-V2. Улучшено в сравнении с серией HS: Нет необходимости в выборе версии датчика HV или LV, можно выбрать нужный диапазон напряжений при помощи перемычки. Увеличена точность показаний тока до +/- 0.5% -> HS - Series +/- 1% Отсутсвие коннекторов DF13, новый коннектор - Molex Clik-Mate 1.25mm 4p Улучшена фильтрация для более стабильных измерений. Поставляется в защитном корпусе (пластик + карбоновая крышка) Коннектор на плате: Molex / Clik-Mate / 1.25mm / 4p (5023800400) Pinout: +5V I (A) U (V) GND Размеры\вес (без корпуса) = 27.5 x 19.5 x 10.5mm / 39g (with 2x 15cm 8AWG) Размеры\вес (с корпусом) = 43.5 x 23.0 x 15mm / 44g (with 2x 15cm 8AWG) 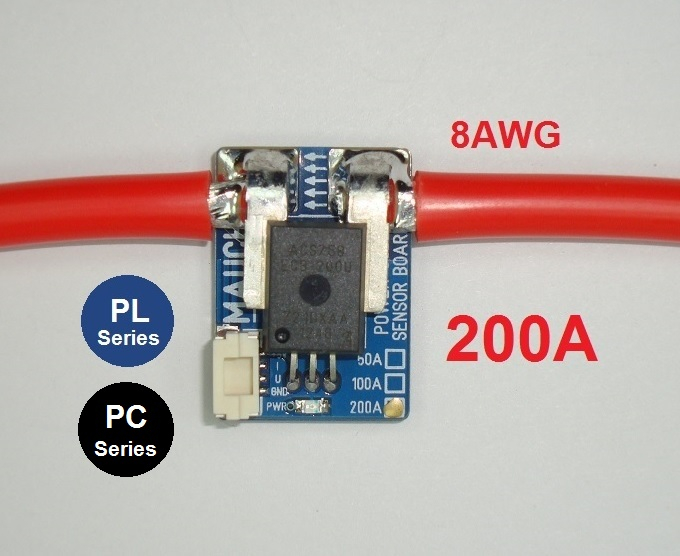 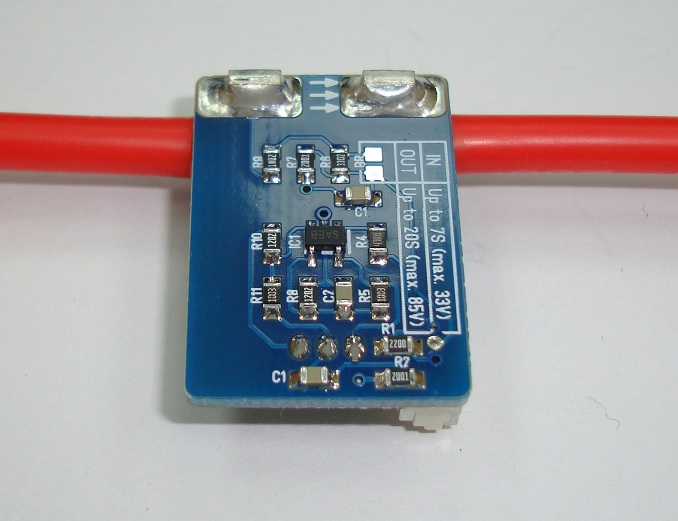  Выбор диапазона напряжений (делителя).  Свободные контакты = до 14S (max. 60V) Делитель указан на вкладыше (около 26.8) Запаянные контакты = до 7S (max. 33V) Делитель 10.0 (при необходимости можно откорректировать в полетном контроллере) | шт. | 1927,40 | ||||||||||||||||||||||||||||||
| Mauch-040 | Mauch 040: PL - Sensor cable | Mauch Electronics 040: 150мм Кабель-переходник от датчика тока серии PL-xxx к Mauch Hub X2-V2 или Mauch BEC PL and PC SeriesКоннектор Molex Clik-Mate 1.25mm 4p | шт. | 201,12 | ||||||||||||||||||||||||||||||
| Mauch-073 | Mauch 073: HS-100-LV 100A Current Sensor Board 2-6S LiPo | Mauch Electronics 073: HS-100-LV 100A датчик тока, основан на Allegro Hall Sensor ACS-100U.Оптимизирован для измерений напряжения до 6S LiPo (до 28В).Плата нуждается в питании 5В (например, от 4-14S HYB-BEC) Питание от подключенного BEC также будет подано на полетный контроллер и подключенную к нему электронику, такую как GPS,телеметрия и пр. К датчику подпаяны силовые плюсовые провода 2x10cm AWG12 (red) Плата поставляется с соединительным 10cm (DF-13-6p <-> DF-13-6p) на FC. 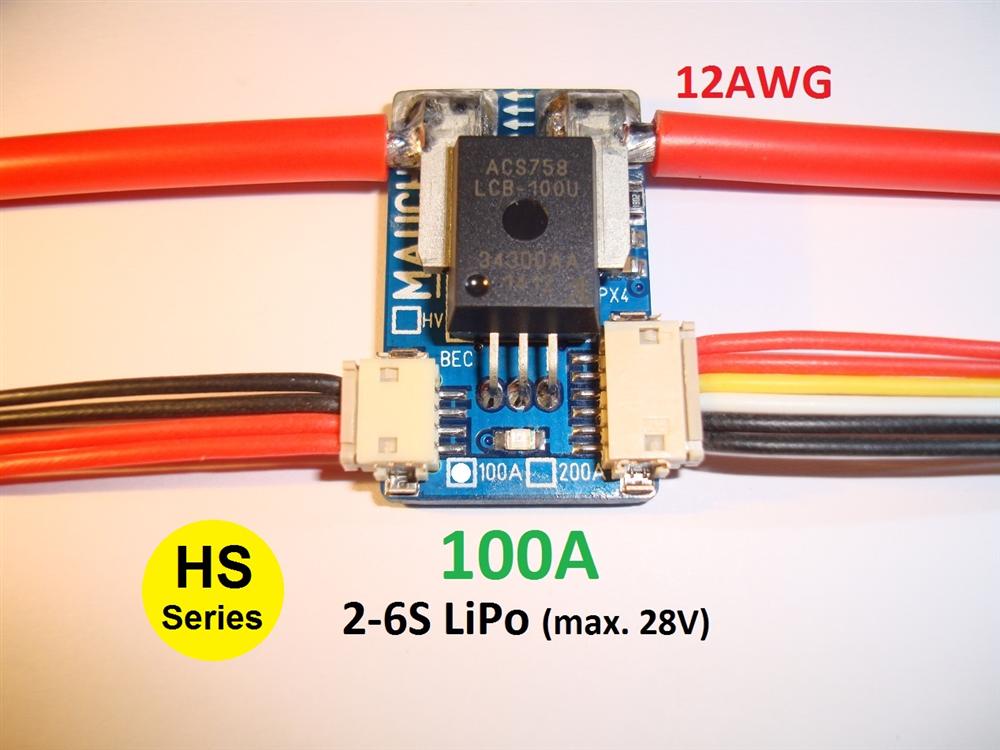 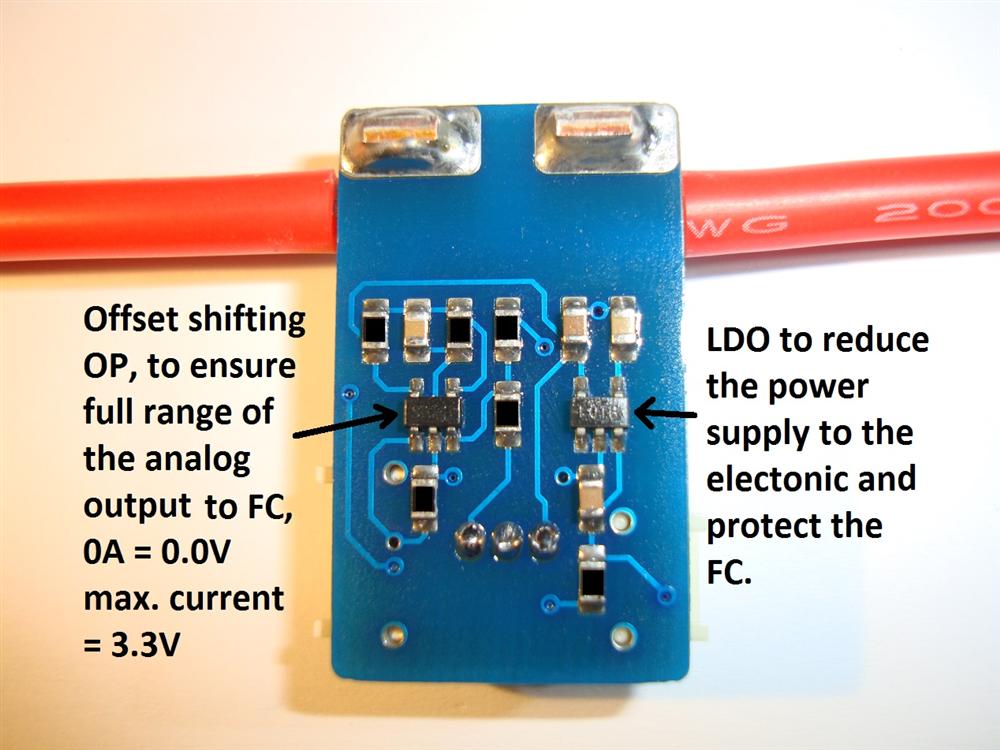 | шт. | 1495,83 | ||||||||||||||||||||||||||||||
| Mauch-074 | Mauch 074: HS-100-HV 100A Current Sensor Board 4-14S LiPo | Mauch Electronics 074: HS-100-HV 100A датчик тока, основан на Allegro Hall Sensor ACS-100U.Оптимизирован для измерений напряжения до 14S LiPo (до 60В).Плата нуждается в питании 5В (например, от 4-14S HYB-BEC) Питание от подключенного BEC также будет подано на полетный контроллер и подключенную к нему электронику, такую как GPS,телеметрия и пр. К датчику подпаяны силовые плюсовые провода 2x10cm AWG12 (red) Плата поставляется с соединительным 10cm (DF-13-6p <-> DF-13-6p) на FC. 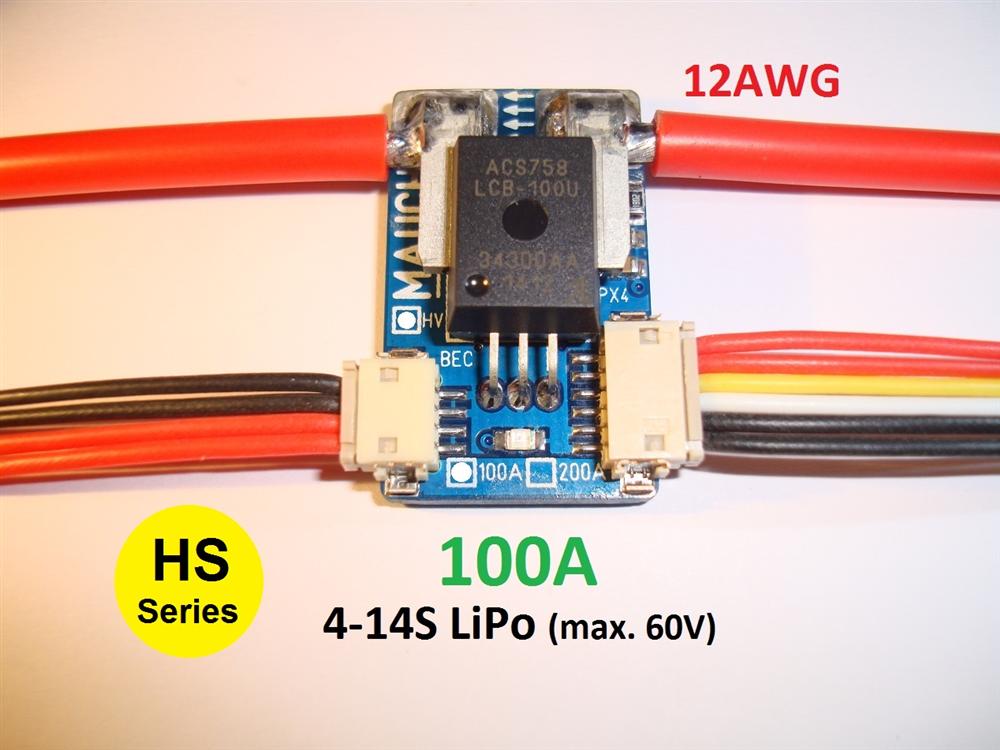 | шт. | 1495,83 | ||||||||||||||||||||||||||||||
| Mauch-075 | Mauch 075: HS-200-LV 200A Current Sensor Board 2-6S LiPo | Mauch Electronics 075: HS-200-LV 200A датчик тока, основан на Allegro Hall Sensor ACS-200U.Оптимизирован для измерений напряжения до 6S LiPo (до 28В).Плата нуждается в питании 5В (например, от 4-14S HYB-BEC) Питание от подключенного BEC также будет подано на полетный контроллер и подключенную к нему электронику, такую как GPS,телеметрия и пр. К датчику подпаяны силовые плюсовые провода 2x10cm AWG10 (red) Плата поставляется с соединительным 10cm (DF-13-6p <-> DF-13-6p) на FC. 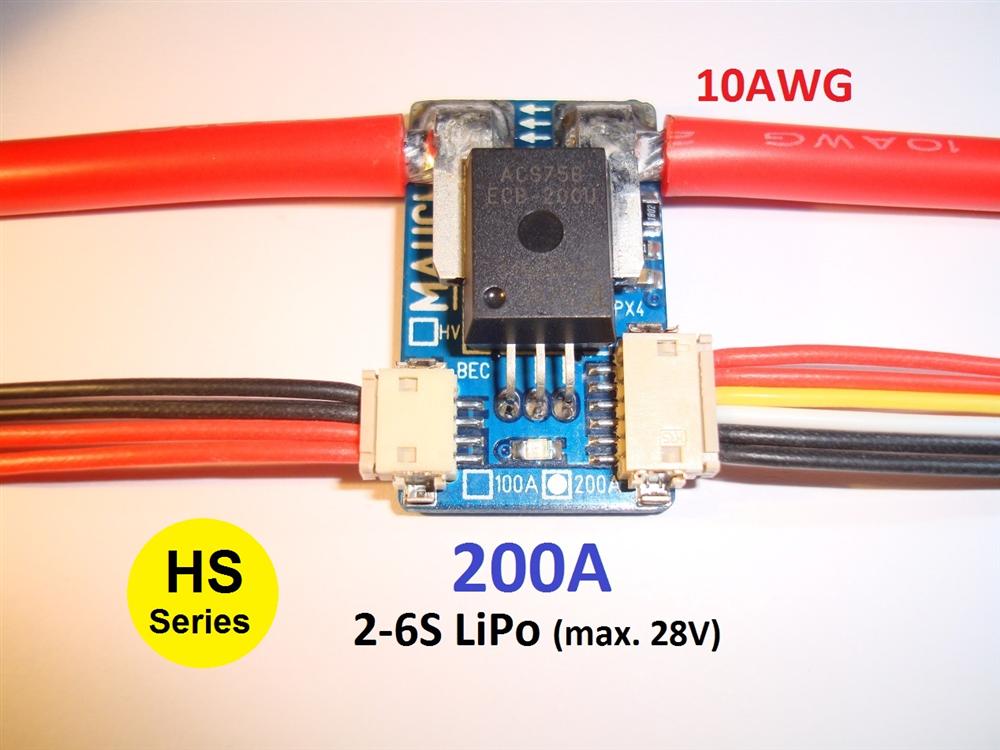 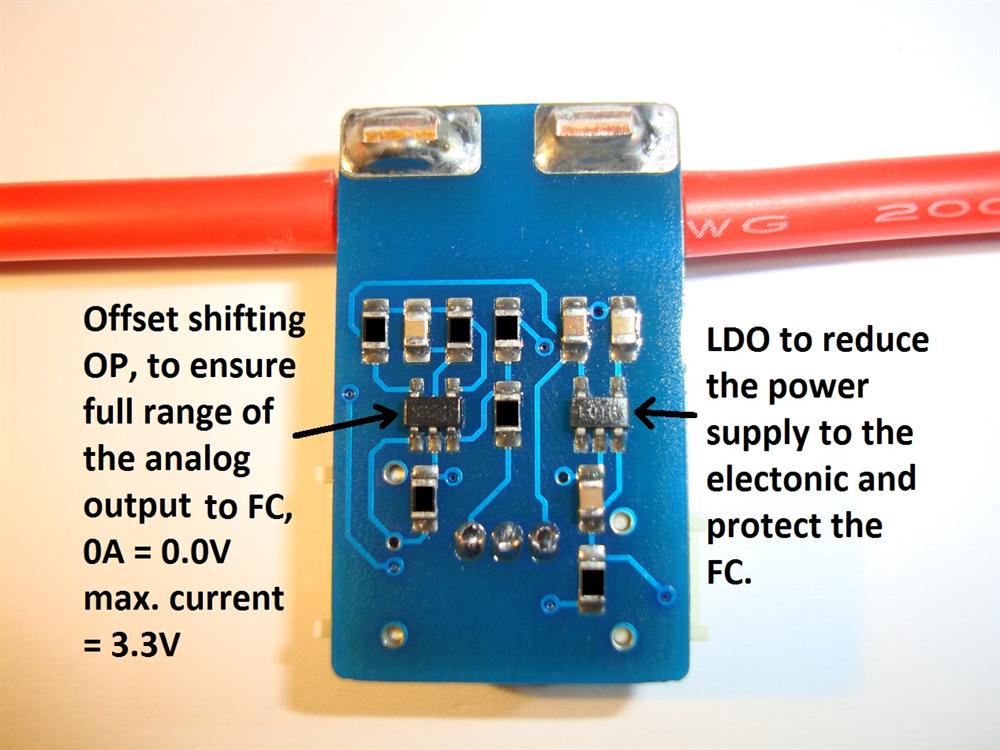 | шт. | 1630,96 | ||||||||||||||||||||||||||||||
| Mauch-076 | Mauch 076: HS-200-HV 200A Current Sensor Board 4-14S LiPo | Mauch Electronics 076: HS-200-HV 200A датчик тока, основан на Allegro Hall Sensor ACS-200U.Оптимизирован для измерений напряжения до 14S LiPo (до 60В).Плата нуждается в питании 5В (например, от 4-14S HYB-BEC) Питание от подключенного BEC также будет подано на полетный контроллер и подключенную к нему электронику, такую как GPS,телеметрия и пр. К датчику подпаяны силовые плюсовые провода 2x10cm AWG10 (red) Плата поставляется с соединительным 10cm (DF-13-6p <-> DF-13-6p) на FC.  | шт. | 1630,96 | ||||||||||||||||||||||||||||||
| Mauch-084 | Mauch 084: 4-14S HYB-BEC / 5.30V DF-13-4P | Mauch Electronics 084: 4-14S HYB-BEC / 5.30V DF-13-4PЭтот BEC является импульсным источником питания с подключенным последовательно линейным стабилизатором Linear LDO (LM1764A) для удаления пульсации. Благодаря подбору компонентов, этот BEC лишь становится теплым в процессе работы (падение напряжения всего 0.35V).Вход и выход защищены конденсаторами Panasonic FC / FM. Вход: 4-14S LiPo / max. 60V . Выход: 5.3V / 3A -> +/- 0.05V. 4-контактный кабель с коннектором DF-13. (для подключения к любому датчику тока серии HS-xxx-xx или к Sensor Hub X2) Размеры: 54mm x 21mm x 14mm Масса 16g | шт. | 2118,05 | ||||||||||||||||||||||||||||||
| Mauch-086-L290 | Mauch 086: 290mm Adapter cable for Pixhawk 2 (Clik-Mate 2mm) | Mauch Electronics 086: 290мм Кабель-переходник от датчика тока серии HS-xxx-xx к Pixhawk 2 (Clik-Mate 2mm)Изготовлен из силиконовых проводов AWG28 с оригинальными коннекторами Hirose DF13 и MOLEX / Clik-Mate 2.0mm. | шт. | 318,96 | ||||||||||||||||||||||||||||||
| RTS-mJST-4 | Micro JST 4Pin 20cm Cable (Molex Picoblade 1.25mm) [RTS-mJST-4] | Кабель соединительный Micro JST (Molex Picoblade 1.25mm) 4-контактный 20см | шт. | 42,74 | ||||||||||||||||||||||||||||||
| RTS-mJST-5 | Micro JST 5Pin 20cm Cable (Molex Picoblade 1.25mm) [RTS-mJST-5] | Кабель соединительный Micro JST (Molex Picoblade 1.25mm) 5-контактный 20см | шт. | 49,02 | ||||||||||||||||||||||||||||||
| mJST-5pin-20 | Micro JST 5Pin Female-Female 20cm Cable (Molex Picoblade 1.25mm) [mJST-5pin-20] | Кабель соединительный Micro JST (Molex Picoblade 1.25mm) 5-контактный 20см | шт. | 37,71 | ||||||||||||||||||||||||||||||
| RTS-mJST-6 | Micro JST 6Pin 20cm Cable (Molex Picoblade 1.25mm) [RTS-mJST-6] | Кабель соединительный Micro JST (Molex Picoblade 1.25mm) 6-контактный 20см | шт. | 50,57 | ||||||||||||||||||||||||||||||
| mJST-6pin-20 | Micro JST 6Pin Female-Female 20cm Cable (Molex Picoblade 1.25mm) [mJST-6pin-20] | Кабель соединительный Micro JST (Molex Picoblade 1.25mm) 6-контактный 20см | шт. | 41,48 | ||||||||||||||||||||||||||||||
| HK387000084-0 | Micro MinimOSD with KV Team Mod [387000084-0/81598] | Micro Minim On Screen Display (OSD) with KV Team ModДанная система Minim OSD является недорогим решением с открытой схемой и программным обеспечением для наложения данных телеметрии на полетное видео.Система Minim OSD специально разработана для использования с ArduPilot Mega (также работает с Multiwii и MegapirateNG) использует протокол MAVlink и имеет очень малые размеры. The Micro Minim is the next step in micro OSD's. It has all the same features as its larger counterpart (except for the DC to DC converter) but in a tiny 15 x 15mm size. The Micro Minim OSD was engineered to bring users a very powerful OSD that will fit on very small models, perfect for the FPV 250 racing quads that are becoming extremely popular. You can choose firmware that is MAVlink compatible for ArduCopter or MultiWii Serial for MultiWii and Baseflight/Clearflight control boardsand has KV mod suport . You can also connect 2 batteries up to 4S so that you can display main flight battery voltage, the 2nd port will allow your FPV battery voltage to be displayed as well. Features: • Most of the same features as the original, larger Minim OSD but less than half the size • FTDI cable compatible pinout • Standard 6-pin ISP header • 2 LED indicators • ATmega328P with Arduino bootloader • Max7456 monochrome on screen display • Micro size (15 x 15mm) • Pad for an analog or digital PWM RSSI signal • Pad for the connection of a current sensor Характеристики: Размеры: 15 x 15 x 4.3мм Вес: 1.2г (без проводов) | комплект | 917,30 | ||||||||||||||||||||||||||||||
| MMOSD-KV | Micro MinimOSD with KV Team Mod for APM, Pixhawk, Naze32 [MMOSD-KV] | Micro Minim On Screen Display (OSD) with KV Team Mod for APM, Pixhawk, Naze32Данная система Minim OSD является недорогим решением с открытой схемой и программным обеспечением для наложения данных телеметрии на полетное видео.Система Minim OSD специально разработана для использования с ArduPilot Mega (также работает с Multiwii и MegapirateNG) использует протокол MAVlink и имеет очень малые размеры. The Micro Minim is the next step in micro OSD's. It has all the same features as its larger counterpart (except for the DC to DC converter) but in a tiny 15 x 15mm size. The Micro Minim OSD was engineered to bring users a very powerful OSD that will fit on very small models, perfect for the FPV 250 racing quads that are becoming extremely popular. You can choose firmware that is MAVlink compatible for ArduCopter or MultiWii Serial for MultiWii and Baseflight/Clearflight control boardsand has KV mod suport . You can also connect 2 batteries up to 4S so that you can display main flight battery voltage, the 2nd port will allow your FPV battery voltage to be displayed as well. 
 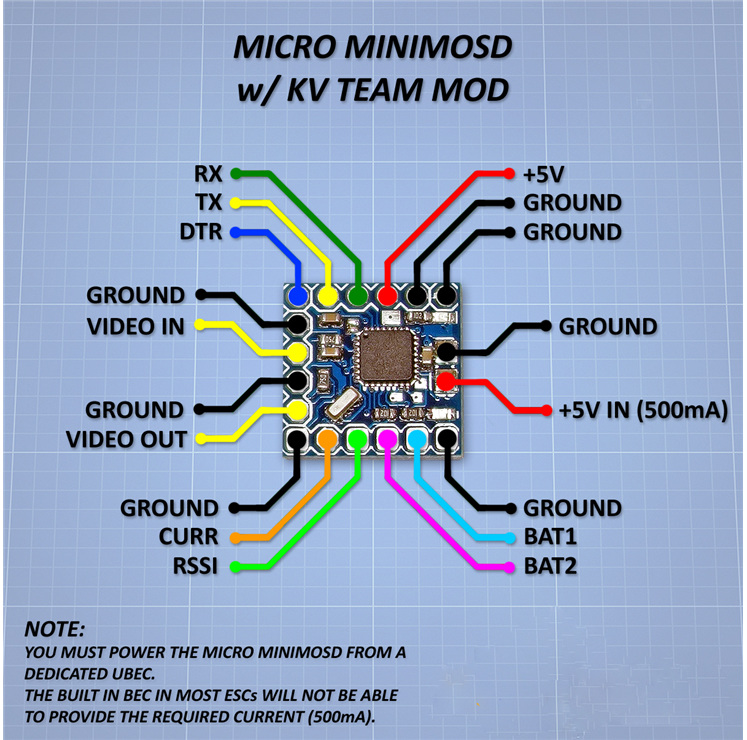 Features: • Most of the same features as the original, larger Minim OSD but less than half the size • FTDI cable compatible pinout • Standard 6-pin ISP header • 2 LED indicators • ATmega328P with Arduino bootloader • Max7456 monochrome on screen display • Micro size (15 x 15mm) • Pad for an analog or digital PWM RSSI signal • Pad for the connection of a current sensor Характеристики: Размеры: 15 x 15 x 4.3мм Вес: 1.2г (без разъемов) | комплект | 733,25 | ||||||||||||||||||||||||||||||
| HK571000042-0 | Micro OSD Compatible with APM2.5/2.6/2.8 & Pixhawk [571000042-0] | Micro OSD совместима с APM2.5/2.6/2.8 & PixhawkThis Micro OSD is the perfect solution for overlaying telemetry data on your FPV rig. It adds the telemetry data to the video signal coming from the onboard camera by reading the MAVlink message from the ArduPilots telemetry port. Due to its compact size it will be perfect for the latest 250 quad racers.It has the Max7456 chip powered by 2 stages to avoid noise from the servos attached and provides an extra clean power line feed to the FPV camera and video link. It utilises 2 external power sources, one from the 11.1V lipoly battery and 5V from the APM. This is a plug and play set up as all the necessary leads are supplied pre-wired and plugged. 
 Specs: Прошивка по умолчанию: MinimOSD Extra Copter 2.2 Поддержка: протокол Mavlink Размеры: 37 x 21 x 8мм Масса: 6г (без проводов) Масса: 18г (с проводами) Совместимость: APM 2.5/2.6/2.8/Pixhawk Included: Micro OSD unit 1 x 4 wire Y harness with micro molex plugs 2 x 4 wire leads with micro molex plugs 2 x 3 wire leads with 1 x micro molex and 1 x servo socket | комплект | 1138,00 | ||||||||||||||||||||||||||||||
| Mini-M8N-GPS-mPIX | Mini M8N GPS Module w/Compass for Mini PIX [Mini-M8N-GPS-mPIX] | Модуль GPS Mini M8N с компасом для Radiolink MiniPIX (JST-GH 6pin)Совместим для работы с Pixhawk, APM, iNav, Betaflight и пр.Особенности Чип GPS: NEO-M8N-0 u-blox M8, 72-канальный Компас: QMC5883L Антенна: керамическая антенна с высоким коэффициентом усиления 2.5dBi 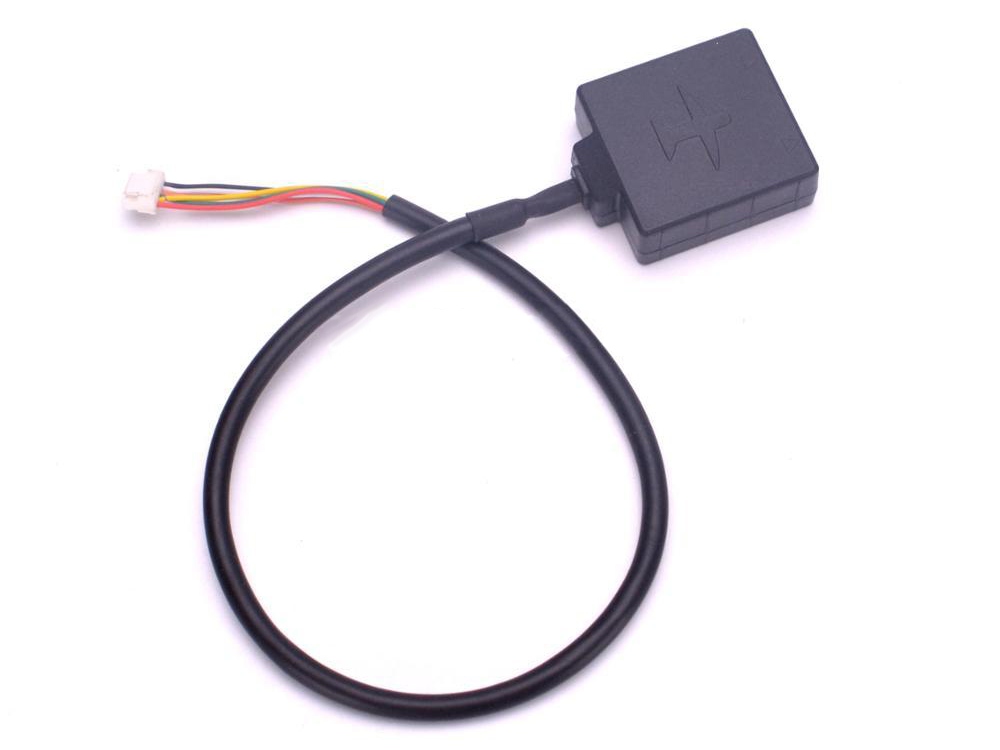 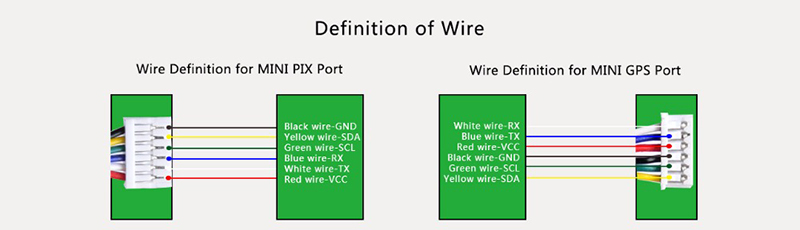 Характеристики: Модель: TS100 mini M8N GPS Точность позиционирования: 0.5м Шаг скорости измерения: 0.1м/с Максимальная высота: 50000м Максимальная скорость: 515м/с Максимальное ускорение: 4G Максимальная скорость обновления: до 10Гц Чувствительность Отслеживание и навигация: -167dBm Обновление: -163dBm Холодный старт: -151dBm Горячий старт: -159dBm Время до первого срабатывания: Холодный старт: 26 сек Горячий старт: 1 сек Питание: 5V DC, 50 - 55mA Порты: GPS UART интерфейс, геомагнитный I2C интерфейс Размеры: 36 х 31 х 12 мм Вес: 23 г GPSmodule | шт. | 860,12 | ||||||||||||||||||||||||||||||
| HK074000204 | Mini OSD System w/GPS Module [074000204/29798] | Мини система OSD с GPS модулемМини система OSD специально разработанная для использования в авиамоделях с маломощной силовой установкой. Компактный вес и миниатюрные габариты системы делают ее идеальной для применения на планерах и моделях с ограниченным внутренним пространством под электронику.Система транслирует на экран важнейшие данные в режиме реального времени, такие как: напряжение аккумулятора, время полета, скорость, и GPS координаты модели. Отличное дополнение к любой авиамодели для полетов от первого лица (FPV).   Особенности: - вывод координат GPS на дисплей - отображение времени - отображение скорости - отображение напряжения - секундомер - RSSI определение сигнала приемника - возможность корректировки выводимой информации на дисплей - поддержка NTSC и PAL сигнала - поддержка антизашумления передающего сигнала - возможность ручной калибровки Характеристики: Вес: основной платы - 4.6г / GPS модуля – 25г Размеры: основной платы - 34x4x20мм / GPS модуля - 45x10x42мм Рабочее напряжение: основной платы - 7.4~12V / GPS модуля - 5V | комплект | 1814,79 | ||||||||||||||||||||||||||||||
| GLB-102407 | MinimOSD Compatible CRIUS MAVLink-OSD V2.0 ATMEGA328P [GLB-102407] | CRIUS MAVLink-OSD V2.0 MinimOSD Compatible ATMEGA328P Microcontroller DC/DC Voltage Stabilization для APM, Pixhawk и пр.Introduction:- MAVLink-OSD is an Arduino based project and it is fully compatible with original MinimOSD. - This board can be used for CRIUS AIOP and Arduflyer / ArduPilot-Mega. - MAVLink-OSD with switching DC/DC stepdown powersupply to maximize efficiency on power system. No more heating problems when using this OSD board. - Default OSD Firmware is MinimOSD-Extra, written by Gábor Zoltán. - About how to use the configurator tool to setup OSD function: https://code.google.com/p/minimosd-extra/ - How to setup hardware (original MinimOSD Wiki): https://code.google.com/p/arducam-osd/wiki/How_to_start_minim Hardware Features: - ATMEGA328P Microcontroller - MAX7456-EUI monochrome on-screen display - 5V/500mA DC/DC regulator for MAX7456-EUI - Operating voltage: 5V(FTDI connector) and 12V(Video I/O connector) - Supported NTSC & PAL - FTDI connector Software features: - Full MAVLink protocol support - Graphical configurator tool Other - Dimension: 19mmx39mm(no include 0.1” pith 90°connector) - Weight: 5g/6g(include cable) Package Included: - MAVLink-OSD V2.0 x 1 - UART 4Pin cable 150mm x1 | комплект | 537,58 | ||||||||||||||||||||||||||||||
| SKU072110 | MinimOSD MAVLink OSD for APM, Pixhawk [SKU072110] | MinimOSD MAVLink для APM, Pixhawk и пр.Данная система Minim OSD является недорогим решением с открытой схемой и программным обеспечением для наложения данных телеметрии на полетное видео.Система Minim OSD специально разработана для использования с ArduPilot Mega (также работает с Multiwii и MegapirateNG) использует протокол MAVlink и имеет очень малые размеры. Основными компонентами являются микроконтроллер ATmega328P с загрузчиком Arduino и MAX7456 - одноканальный монохромный генератор экранного меню со встроенной энергонезависимой памятью (EEPROM). Программирование осуществляется через FTDI-совместимый 6-контактный адаптер. Данная система также имеет возможность использовать два независимых источника питания для развязки цифровой и аналоговой частей схемы: Возможно, отдельно подать 5 вольт для микроконтроллера ATmega и цифровой части OSD, через кабель FTDI или другой 5 вольтовой источник напряжения, и через расположенный в аналоговой части OSD, разъём благодаря встроенному регулятору напряжения на 5 вольт, который позволяет подавать на него до +12 вольт на входе. В случае объединения питания цифровой и аналоговой части не следует питать плату от полётного контроллера т.к. это может привести к перегрузке стабилизатора контроллера. Особенности: • Микроконтроллер ATmega328P с загрузчиком Arduino • MAX7456 - одноканальный монохромный генератор экранного меню со встроенной энергонезависимой памятью (EEPROM), и совместима со стандартами NTSC и PAL. • FTDI совместимый вход • Стандартный 6-пиновый IPS разъем • Два независимых контура питания для цифровой и аналоговой частей схемы со светодиодной индикацией на каждом. • Перемычки для разделения питания • Встроенный источник напряжения +5V 500mA (входное напряжение 5-12В) • Перемычка для выбора PAL NTSC • Контрольные точки для HSYNC (Выход горизонтальной синхронизации) и LOS (Выход потери синхронизации) Характеристики: Напряжение: 5-12В Размеры: 50 x 18 x 10мм Вес: 4г | комплект | 536,32 | ||||||||||||||||||||||||||||||
| HK387000015 | MinimOSD v1.1 [387000015/36844] | Minim OSD v1.1 для APM, Pixhawk и пр.Данная система Minim OSD v1.1 является недорогим решением с открытой схемой и программным обеспечением для наложения данных телеметрии на полетное видео.Система Minim OSD специально разработана для использования с ArduPilot Mega (также работает с Multiwii и MegapirateNG) использует протокол MAVlink и имеет очень малые размеры. Основными компонентами являются микроконтроллер ATmega328P с загрузчиком Arduino и MAX7456 - одноканальный монохромный генератор экранного меню со встроенной энергонезависимой памятью (EEPROM). Программирование осуществляется через FTDI-совместимый 6-контактный адаптер. Данная система также имеет возможность использовать два независимых источника питания для развязки цифровой и аналоговой частей схемы: Возможно, отдельно подать 5 вольт для микроконтроллера ATmega и цифровой части OSD, через кабель FTDI или другой 5 вольтовой источник напряжения, и через расположенный в аналоговой части OSD, разъём благодаря встроенному регулятору напряжения на 5 вольт, который позволяет подавать на него до +12 вольт на входе. В случае объединения питания цифровой и аналоговой части не следует питать плату от полётного контроллера т.к. это может привести к перегрузке стабилизатора контроллера. Особенности: • Микроконтроллер ATmega328P с загрузчиком Arduino • MAX7456 - одноканальный монохромный генератор экранного меню со встроенной энергонезависимой памятью (EEPROM), и совместима со стандартами NTSC и PAL. • FTDI совместимый вход • Стандартный 6-пиновый IPS разъем • Два независимых контура питания для цифровой и аналоговой частей схемы со светодиодной индикацией на каждом. • Перемычки для разделения питания • Встроенный источник напряжения +5V 500mA (входное напряжение 5-12В) • Перемычка для выбора PAL NTSC • Контрольные точки для HSYNC (Выход горизонтальной синхронизации) и LOS (Выход потери синхронизации) В данной ревизии платы Minim OSD v1.1 устранена возможная проблема перегрева и выхода из строя, встроенного источника напряжения. Характеристики: Напряжение: 5-12В Размеры: 50 x 18 x 10мм Вес: 4г | комплект | 1132,56 | ||||||||||||||||||||||||||||||
| 3DRC-MiniOSD | MinimOSD V2 Модуль Ardupilot MinimOSD (не оригинал) [3DRC-MinimOSD] | Модуль MinimOSD V2 для APM, Pixhawk и пр. | комплект | 537,58 | ||||||||||||||||||||||||||||||
| HK387000001 | MultiWii 328P Flight Controller w/FTDI & DSM2 Port (27033) [387000001] | Полетный контроллер для мультикоптера - MultiWii 328P Flight Controller w/FTDI & DSM2 PortВ комплекте: плата электроники со встроенным USB-интерфейсом и DSM2 портом.The MultiWii 328P is a gyro/accelerometer based flight controller that is loaded with features. This version of the MultiWii supports DSM2 satellite receiver functionality. With expandability options and full programmability, this device can control just about any type of aircraft. This is the ideal flight controller for your multi-rotor aircraft. Features: 
Specs: Package content: More information can be found on the Multiwii Website. | комплект | 2185,50 | ||||||||||||||||||||||||||||||
| HK387000007 | Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) V2.0 [387000007] (31138) | Полетный контроллер для мультикоптера - Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) V2.0В комплекте: плата электроники со встроенными USB-интерфейсом, гироскопами и акселлерометрами, порт I2C, комплект соединительных проводов.This board features a multiple serial interface as well as a dedicated I2C interface. You can now plug in a GPS directly, and you still have extra ports for other external devices. In addition to that, the new ATmega 2560 has more IO pins so it can both read the PWM signal from your receiver and it has enough PWM outputs to control the ESCs directly without the need to do the PWM signal in software. This controller even has a MicroUSB port right on the board, no need to attach an extra FTDI USB interface. The motion sensing side features a new generation MEMS Gyro, a MPU6050 by InvenSense, which has the MEMS Gyro / Accelerometer sensor on a single chip. There’s also a Interested in GPS functionality? Well this is one of the most cost effective ways to get started — simply add a 10Hz GPS module (coming soon) and you’re good to go! 
 Features:
Features:• Supported MegaPirateNG and MultiWii firmware • Up to • 8 input channels for standard receiver • 4 serial ports for debug/Bluetooth Module/OSD/GPS/telemetry • 2 servos output for PITCH and ROLL gimbal system • 1 servo output to trigger a camera button • 6 Analog output for extend device • A I2C port for extend sensor or device • Separate 3.3V and 5V LDO voltage regulator • ATMega 2560 Microcontroller • MPU6050 6 axis gyro/accel with Motion Processing Unit • HMC5883L • MS5611-01BA01 highprecision altimeter • FT232RQ USB-UART chip and Micro USB receptacle • On board logic level converter Flight mode for Multiwii: • One of the following basic modes — Acro — Level — Alt Hold — Heading Lock • Optional mode — HeadFree (CareFree) — GPS Hold (Need GPS receiver) — GPS Back to home position (Need GPS receiver) Flight mode for MegaPirate: • Acro • Alt Hold • Loiter (uses GPS) • Guided (uses GPS) • Position (uses GPS) • Circle (uses GPS) • RTL (uses GPS) • Auto(uses GPS) • Follow Me(uses GPS) Sizes: Dimension: 50mmX50mm Height: 11.6mm Fixing hole spacing: 45mm Hole diameter: 3mm Weight: 14.2g Includes: 1 x AIO PRO FC 3×3Pin to 1Pinx3 cable 100mm 1×3Pin to 3Pin cable 100mm 1 x Molex 1.25mm 4Pin cable 100mm 1 x Molex 1.25mm 6Pin cable 100mm 1 x Molex 1.25mm 8Pin cable 100mm | комплект | 3592,19 | ||||||||||||||||||||||||||||||
| HK381000134 | MultiWii Lite V1.0 Flight Controller w/FTDI (27109) [381000134] | Полетный контроллер для мультикоптера - MultiWii Lite V1.0 Flight Controller w/FTDIВ комплекте: только плата электроники, USB-интерфейс, соединительные кабеля.The Multiwii Lite V1.0 is a gyro/accelerometer based flight controller that is loaded with features. With expandability options and full programmability, this device can control just about any type of aircraft. This is the ideal flight controller for your multi-rotor aircraft. Features: • Small size, 35×35mm mounting holes • 6 input channels for standard receiver and PPM SUM receiver • Up to • 2 servos output for PITCH and ROLL gimbal system • Can utilize a servo’s output to trigger a camera button • FTDI/UART TTL socket for debug, upload firmware or LCD display • I2C socket for extend sensor, I2C LCD/OLED display or CRIUS I2c-GPS NAV board • Separate 3.3V and 5V LDO voltage regulator • ATMega 328P Microcontroller • MPU6050 6 axis gyro/accelerometer with Motion Processing Unit • On board logic level converter Flight modes: • Acro • Self-Level 
 Specs:
Specs: Dimension: 40×12×40mm Weight: 9g Fixing hole spacing: 35mm (It can be changed to 45mm by CRIUS Distribution Board) Hole diameter: 3mm Package content: MultiWii Lite FC x 1 USB program board x 1 (Mini USB cable required but sold separately) 3Pin to 1Pinx3 cable 100mm x 2 3Pin to 3Pin cable 100mm x 1 More information can be found on the Multiwii Website. http://www.multiwii.com | комплект | 2082,43 | ||||||||||||||||||||||||||||||
| HK9387000008 | MultiWii MicroWii ATmega32U4 Flight Controller USB/BARO/ACC/MAG [9387000008] | Полетный контроллер для мультикоптера - MultiWii MicroWii ATmega32U4 USB/BARO/ACC/MAGВ комплекте: плата электроники со встроенными USB-интерфейсом, барометрическим датчиком, акселлерометрами, магнитным компасом, порт для GPS или сателлита DSM2, комплект соединительных проводов.The MicroWii is a complete multi-rotor flight controller. It is based on the ATmega32U4, which is the processor of the Arduino Leonardo. The MicroWii incorporates an MPU-6050 chip, which is a combined gyro and accelerometer plus a precise MS5611 barometer and HMC5883L magnetometer. This is the ultimate solution for powerful flight performance with your multi-rotor project. The possibilities are endless with the MicroWii, only limited by your imagination! 
 Features:
Features:• USB on chip (no FTDI or UART needed) • Free serial port (it’s possible to use a DSM2 satellite together with the GUI) • 6 receiver inputs • 6 high resolution • Supports all configs up to OKTO with cam-stab support • 2.5kB RAM • ATmega32U4 based with Leonardo Bootloader • 10DOF sensor array • MPU-6050 (GYRO/ACC) • HMC-5883L (MAG) • MS5611-01BA03 (BARO) • Bluetooth/GPS connector (on bottom; only GPS or DSM2 satellite can be used at one time since the 32U4 only has one UART) Specs: Main chip: ATmega32U4 CPU speed: 16MHz Flash size: 32kB (3.3kB are taken by the Bootloader) Input: 6 x high-res RX inputs (2 AUX channels) Output: 6~8 motor outputs (motor Dimension: 50×50×16mm Weight: 14g | комплект | 2492,32 | ||||||||||||||||||||||||||||||
| HK9387000009 | MultiWii NanoWii ATmega32U4 Micro Flight Controller USB/GYRO/ACC [9387000009] | Полетный контроллер для мультикоптера - MultiWii NanoWii ATmega32U4 USB/GYRO/ACCВ комплекте: плата электроники со встроенными USB-интерфейсом, гироскопами и акселлерометрами, порт для GPS или сателлита DSM2, комплект соединительных проводов.The NanoWii is a complete multi-rotor flight controller. It is based on the ATmega32U4, which is the processor of the Arduino Leonardo and incorporates a MPU-6050 chip, which is a combined gyro and accelerometer. This is the ultimate solution for powerful flight performance with your multi-rotor project, especially micro size models. The possibilities are endless with the NanoWii, only limited by your imagination! 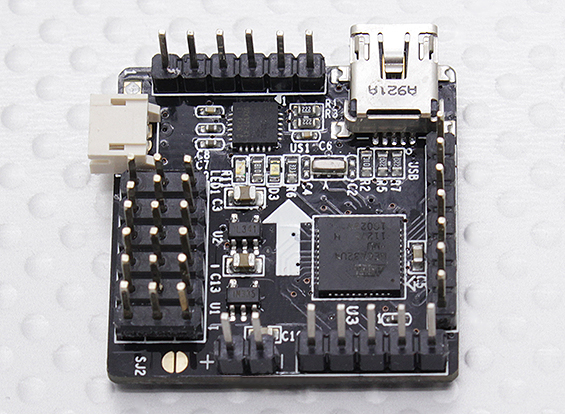
 Features:
Features:• Ultra-compact size • Based on Atmega32u4 • 6 RX inputs • 6 HW PWM @ 11bit (better resolution, smoother response) • Up to 8 motors or servos • Invensense MPU6050 6 axis gyro and accelerometer (supports auto-level) • Onboard USB • UART connector (for bluetooth telemetry, GPS, DSM2 satelite etc) • I2C connector (add barometer or magnetometer for heading hold and altitude hold) Comes preloaded with Arduino bootloader (Leonardo) Specs: Main chip: ATmega32U4 CPU speed: 16MHz Flash size: 32kB (3.3kB are taken by the Bootloader) Input: 6 x high-res RX inputs (2 AUX channels) Output: 6~8 motor outputs (motor Dimension: 30×30×16mm Weight: 6.5g | комплект | 502,80 | ||||||||||||||||||||||||||||||
| HK387000003 | MultiWii PRO Flight Controller w/MTK GPS Module [387000003/26588] | Полетный контроллер для мультикоптера - MultiWii PRO Flight Controller с модулем MTK GPSMultiWii PRO представляет собой контроллер мультикоптера с базовой инерциально-навигационной системой, который может быть запрограммирован соответственно вашим требованиям. Эта версия MultiWii поддерживает прямое подключение GPS модуля MTK 3329 (входит в комплект) за счет чего обладает очень точным позиционированием. С расширенными возможностями и возможностью полного программирования, это устройство может управлять любым типом летательных аппаратов. Это идеальный контроллер полета для ваших мультикоптеров с любым количеством роторов. Особенности: 
 
 Характеристики: *Примечание: О включении GPS функции нужно читать в документации в сети Комплектация: | комплект | 4765,39 | ||||||||||||||||||||||||||||||
| HK381000133 | MultiWii SE V2.0 Flight Controller w/FTDI [381000133] | Полетный контроллер для мультикоптера - MultiWii SE V2.0 Flight Controller w/FTDIВ комплекте: только плата электроники, USB-интерфейс, соединительные кабеля.The Multiwii SE V2.0 is a gyro/accelerometer based flight controller that is loaded with features. With expandability options and full programmability, this device can control just about any type of aircraft. This is the ideal flight controller for your multi-rotor aircraft. Features: • Small size, 35×35mm mounting holes • 6 input channels for standard receiver and PPM SUM receiver • Up to • 2 servos output for PITCH and ROLL gimbal system • Can utilize a servo’s output to trigger a camera button • FTDI/UART TTL socket for debug, upload firmware or LCD display • I2C socket for extend sensor, I2C LCD/OLED display or CRIUS I2c-GPS NAV board • Separate 3.3V and 5V LDO voltage regulator • ATMega 328P Microcontroller • MPU6050 6 axis gyro/accelerometer with Motion Processing Unit • HMC5883L • BMP085 digital pressure sensor • On board logic level converter Flight mode: • One of the following basic mode — Acro — Level — Alt Hold — Head Lock • Optional mode — HeadFree (CareFree) — GPS Hold (Need GPS receiver + I2C-GPS NAV Board) — GPS Return to home position (Need GPS receiver + I2C-GPS NAV Board) 
 Specs:
Specs: Dimension: 40×12×40mm Weight: 9.6g Fixing hole spacing: 35mm (It can be changed to 45mm by CRIUS Distribution Board) Hole diameter: 3mm Package content: MultiWii SE FC x 1 USB program board x 1 (Mini USB cable required but sold separately) 3Pin to 1Pinx3 cable 100mm x 2 3Pin to 3Pin cable 100mm x 1 More information can be found on the Multiwii Website. http://www.multiwii.com | комплект | 3078,92 | ||||||||||||||||||||||||||||||
| MWC_MultiWii_Lite | MWC MultiWii Lite 4-axis Flight Control Board QUADX w/FTDI Basic Breakout | Полетный контроллер для мультикоптера - MWC MultiWii Lite 4-axis Flight Control Board QUADX w/FTDI Basic BreakoutВ комплекте: только плата электроники и USB-интерфейс с кабелем.
MWC MultiWii Lite Lightweight Version
4-axis Flight Control Board QUADX
| комплект | 2815,68 | ||||||||||||||||||||||||||||||
| MWC_MultiWii_SE | MWC MultiWii SE Standart Edition 4-axis Flight Control Board QUADX w/FTDI Basic Breakout | Полетный контроллер для мультикоптера - MWC MultiWii SE (Standart Edition) 4-axis Flight Control Board QUADX w/FTDI Basic BreakoutВ комплекте: только плата электроники и USB-интерфейс с кабелем.
MWC MultiWii SE Standard Edition 4-axis
X-mode Flight Control Board QUADX
FTDI Basic Breakout Arduino USB-TTL 6 PIN
3.3 5V for MWC MultiWii Lite /SE | комплект | 4634,14 | ||||||||||||||||||||||||||||||
| MWC-25SE | MWC-25SE Полетный контроллер CRIUS MultiWii V2.5SE для мультикоптеров | Полетный контроллер CRIUS MultiWii V2.5SE для мультикоптеров | комплект | 2048,44 | ||||||||||||||||||||||||||||||
| MWC-BT | MWC-BT Модуль Bluetooth для контроллера CRIUS MWC 2.5SE | Модуль Bluetooth для контроллера CRIUS MWC 2.5SE | комплект | 800,76 | ||||||||||||||||||||||||||||||
| MWC-Display | MWC-Display Дисплей LCD для настройки контроллера CRIUS MWC V2.5SE | Дисплей LCD для настройки контроллера CRIUS MWC V2.5SE | комплект | 856,62 | ||||||||||||||||||||||||||||||
| MFD-AS-Sensor | MyFlyDream AirSpeed Sensor w/Pitot tube | Датчик воздушной скорости MFD для автопилота MFD AP.Подключается к порту AUX на автопилоте. | комплект | 1257,00 | ||||||||||||||||||||||||||||||
| MFDAAT6CH-V5 | MyFlyDream Automatic Antenna Tracking V5 6CH [MFDAAT6CH-V5] | Автоматическая следящая станция MyFlyDream Antenna Tracking V5 6CHMyFlyDream V5 AAT Automatic Antenna Tracker 6 Channel In the Box:TeleFlyOSD x 1 AATDriver x 1 MyFlyDream Tracker (6CH) x 1 USB Programmer with cable x 1 Automatic Antenna Tracker Package Weight: 905 grams Size: 165 * 107 * 40mm (L * W * H) Input voltage: 10 ~ 13V (recommended 12V) Current consumption 100mA load Maximum load: 1KG (no balance) / 3KG (with balance) Tilt range: 0 ~ 90 degrees Horizontal rotation range of: 0~ 360 degrees Unlimited Tilt speed: 100 Degrees/s Horizontal rotation speed: 200 Degrees/s Signal number of channels avail: 3 ~ 9 Current consume(empty load): 100mA The complete unit contains everything you need to set up your complete MyFlyDream-Tracking system. The only thing you will need is an OSD with GPS unit or a single GPS unit if you don´t want to use an OSD. The MyFlyDream Tracking system will work with almost every GPS that uses the NMEA standard. The TeleFlyOSD is connected to your GPS unit and transmits the GPS data to the ground via the audio channel of your AV transmitter. On the ground it is fed through the AAT (Automatic Antenna Tracker) to the MyFlyDream-Driver. The Driver handles the signal and controls the servos to turn the AAT. What makes the MyFlyDream Tracking System so special: - You don´t have to buy a certain OSD type to be able to track your plane. Instead you can simply use the OSD you like the most. Or even track your plane without an OSD. The new TeleFlyOSD offers the possibility to get an OSD for FREE, it is the same price as the TeleFlyLite (discontinued). You can use the OSD feature or just use the TeleFlyOSD the same way you did the TeleFlyLite... as an audio modem combined with your favorite OSD or without an OSD, it´s your choice. - The high quality slipring provides endless rotation, meaning endless freedom, you will never again temporarily loose your signal because the tracker has reached its maximum rotation angle and is turning over to the other side. - The built-in compass unit makes setting up the tracker on the flying field a breeze. No need to check the correct orientation by hand or walk around with your plane in hand, just put your MyFlyDream AAT on a tripod or other support, connect everything with a power source, wait for a proper GPS fix, push "Set Home" and FLY. It´s as simple as that. -The TeleFlyOSD weighs only 8g and is very small (46x25x7mm) . It can be added to almost every setup easily even where the space is very sparse and weight is always an issue. It also offers basic OSD features like : Flying Time Virtual compass GPS status Battery voltage (with extension board) Current amperage (with extension board) Home Arrow Distance to Home Altitude Speed 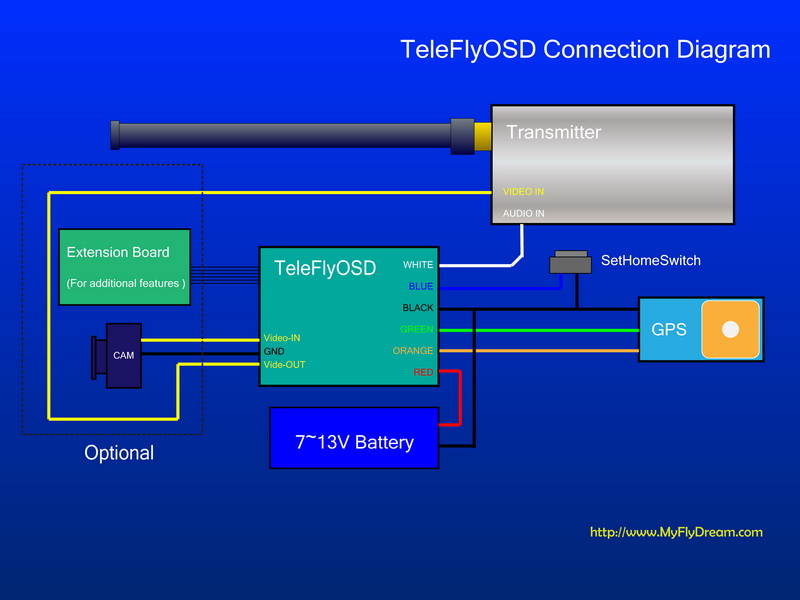  
 Пример установки на земле (штатив и приемник в комплект не входят):  Пример установки на подвижной платформе (только при наличии MyFlyDream GPS for DuoTracking, подставка и приемник в комплект не входят)  V_ACCS V_ANTENNA | комплект | 18247,45 | ||||||||||||||||||||||||||||||
| MFD-AP | MyFlyDream AutoPilot | Автопилот MFD AP для моделей самолетов.MyFlyDream AutoPilot unitMFD AutoPilot unit x 1 LS20033 GPS x 1 100A Current sensor x 1 Shielded cable set x 1 USB-TTL board for firware update x 1    Main Features: 1. All In One design. AutoAntennaTracking/AHRS based AutoPilot(3-Axis gyro+accelerometer+magnetic compass + barometer)/Advance OSD/Power module/... are all built in this small,light unit. 2. Fully compatible with AAT system 3. Rich extension ports for Sonar/Air Speed Sensor/Other accessories. 4. AHRS is build-in with Anti-vibration design, easy to install on the plane without any damper. 5. Compatible with MAVLink protocol. Support APM Planner GroundStation software. You can synchronize the waypoints by clicking one button. There are also some GS Apps for mobile phones available. 6. Support PPM/PWM input. 7. All functions/parameters can be accessed by the transmitter and OSD menu. 8. MFD AutoPilot transmitting downlink data for tracking via reliable VIDEO signals, which is compatible with almost all kinds of transmitters. 9. Shipped with customized shielded cables for camera/video transmitter, 10Hz LS20033GPS, 100A current sensor and USB programmer for firmware update. easy to setup. Including: MFD AutoPilot unit x 1 LS20033 GPS x 1 100A Current sensor x 1 Shielded cable set x 1 USB-TTL board for firware update x 1 | комплект | 12507,15 | ||||||||||||||||||||||||||||||
| MFD-BTM | MyFlyDream Bluetooth module | Модуль Bluetooth MFD для наземной станции AATdriver.Bluetooth module for AATdriver1200bps 5V power supply Plug and Play V_ACCS V_ANTENNA | комплект | 549,94 | ||||||||||||||||||||||||||||||
| MFD-CS-100A | MyFlyDream CurrentSensor (100A) | Датчик тока MFD 100А для автопилота MFD AP или телеметрии MFD TeleFlyPro. | комплект | 1257,00 | ||||||||||||||||||||||||||||||
| MFD-CS-50A | MyFlyDream CurrentSensor (50A) | Датчик тока MFD 50А для автопилота MFD AP или телеметрии MFD TeleFlyPro. | комплект | 1257,00 | ||||||||||||||||||||||||||||||
| MFD-GPS-fDT | MyFlyDream GPS for DuoTracking [MFD-GPS-fDT] | Модуль MyFlyDream GPS для следящей станции DuoTrackingGPS to use with MFD AATDriver.It has been configured to 19200bps/NMEA, and has a 6pin connector to connect to AATDriver. After plug this GPS to AATDriver the AAT system "DuoTracking" function is activated. The tracker knows where it is and will keep tracking even when it's moving on a car. And you don't need to SetHome before take off anymore. How to check if the GPS is correctly connected with AATDriver: Hold the HOME button on AATDriver. If the local GPS is recognized, you will see a message in the middle of the OSD screen: [LOCAL GPS:X] (X is the number of locked satellites) V_ACCS V_ANTENNA GPSmodule | комплект | 2639,70 | ||||||||||||||||||||||||||||||
| MFD-UBLox-GPS | MyFlyDream UBLox GPS | Модуль MFD UBLox GPS3.3V~5V power supply.output NMEA data @ 38400bps, 5Hz update rate. For MFD AP ,TeleFlyPro , and V5 AATDriver. GPSmodule | комплект | 2262,60 | ||||||||||||||||||||||||||||||
| NAZE32-REV6-10DOF | NAZE32 REV6 10DOF MPU6500 32-bit Flight Controller for Multicopter | Полетный контроллер NAZE32 REV6 10DOF (Afroflight32) на плате 36x36мм для мини-коптераSpecification: Item name: NAZE32 REV6 Flight ControllerCPU: STM32F 103CBT6 Sensors: MPU6500 USB To UART: CP2104 Height: 36mm Width: 36mm Weight: 6 grams (no headers, 8 grams with) Version: 10 DOF (with compass barometer) 
 Features: Battery voltage monitoring Built-in FrSky telemetry converter Modern 32-bit processor (STM32 F103) running at 3.3V/72MHz. Onboard USB for setup and configuration Modern GUI for all operating systems, Baseflight Configurator | комплект | 1245,79 | ||||||||||||||||||||||||||||||
| NEO-6M-GPS | NEO-6M GPS Module [387000004] (31135) | Модуль GPS NEO-6M для ardupilot mega v2 и плат MultiWii с интерфейсом I2CДанный модуль GPS можно использовать вместе с ardupilot mega v2. За счет использования новейших технологий, он обеспечит непревзойденную точность позиционирования на любой Вашей авиа или мультироторной системе.Для настройки данного модуля под конкретный стабилизатор полета Вам потребуется USB - FTDI адаптер (стабилизатор полета MultiWii Copter I2C GPS требует 115200 бодов (бод - единица измерения, выражающая число изменений состояния канала связи в секунду)). Обратите внимание, что по умолчанию, скорость передачи данных на модуле установлена 38400. 
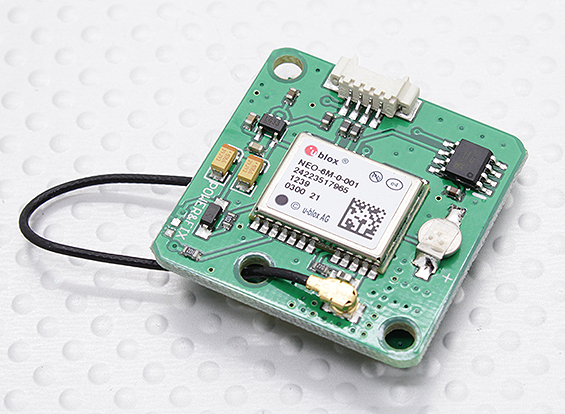
Особенности: • Автономный GPS приемник • модуль U-blox NEO-6M GPS • «горячий старт» занимает от 1 секунды • SuperSense ® Indoor GPS: -162 dBm чувствительности отслеживания • технология антиподавления • Поддержка SBAS (WAAS, EGNOS, MSAS, GAGAN) • u-blox 6 располагает 50 каналами позиционирования с более чем 2 миллионами эффективных корреляторов • Timepulse • скорость обновления местоположения 5Hz • температурный режим работы: от -40 до 85°C • разъем UART TTL • EEprom (память) для хранения настроек • аккумулятор для резервного сохранения информации • встроенная антенна 18X18мм • совместим с RoHS Характеристики: Размеры: 22ммX30мм Высота: 13мм Диаметр крепежных отверстий: 3мм Масса: 12г GPSmodule | комплект | 1612,42 | ||||||||||||||||||||||||||||||
| GLB-106503 | N-OSD Remzibi OSD Module Special for DJI Lite/V2 GPS | Блок Remzibi N-OSD для передачи телеметрической информации на монитор (через видео канал) для DJI NAZA Lite/V2 GPSОсобенности:Отображение: полетный режим, напряжение силового аккумулятора, высота полета, скорость полета, удаление от точки старта, количество спутников GPS и пр.  Features: - Completely compatible with Remzibi OSD, same function - With GPS adaption interface, could share GPS data from DJI Lite/V2 GPS module - Power input with reverse polarity protection diode - Flight controller terminal with reverse polairty protection to protect flight controller and GPS, with power indicator lamp - Seperate interface between TTL and power - Dimension: 55*40mm(L*W) 
  Usage: - GPS wiring. Naza GPS plug into N-OSD board "Naza GPS IN" interface - Power interface. Offer power to N-OSD, 2-3S, with power indicator - TTL interface. Designed for display screen | комплект | 1765,33 | ||||||||||||||||||||||||||||||
| OMNIBUSF4-V3S | OMNIBUS F4 V3S Betaflight Flight Controller w/OSD, Baro, LC Filter | Полетный контроллер OMNIBUS F4 V3S STM32F405, MPU6000, OSD, BMP280, 2x UARTs, 1x Softserial, 1x I2C для FPV дроновЕсть возможность прошивки Ardupilot
 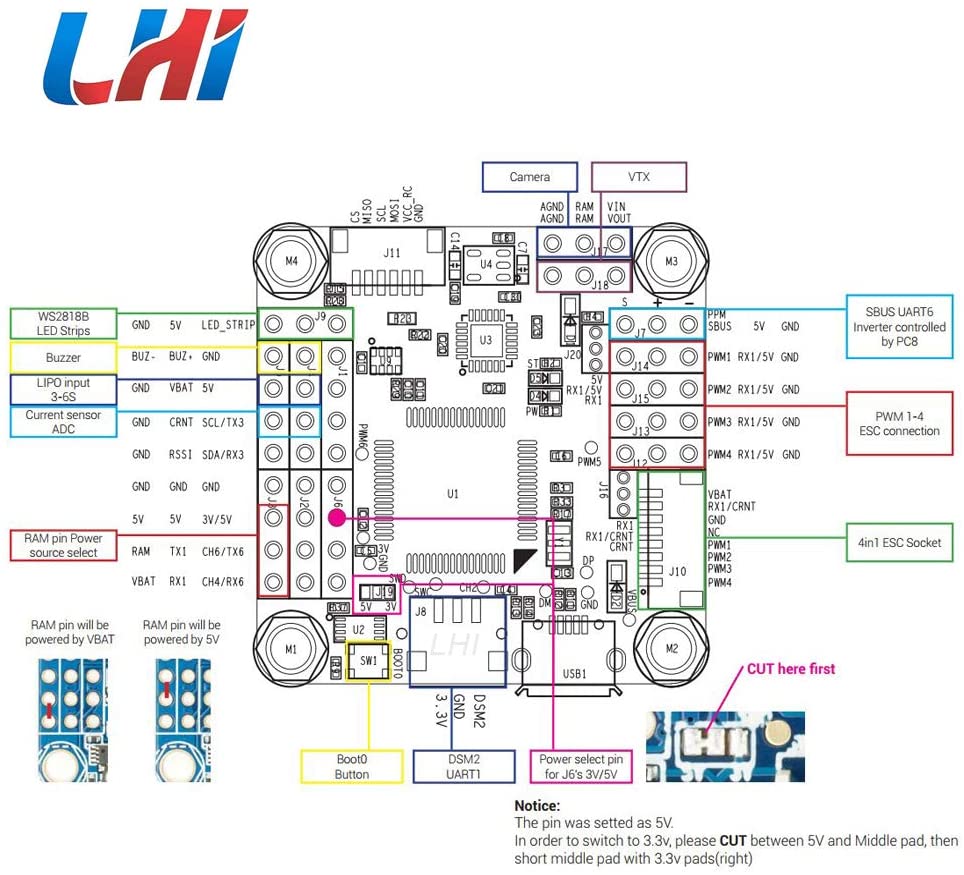
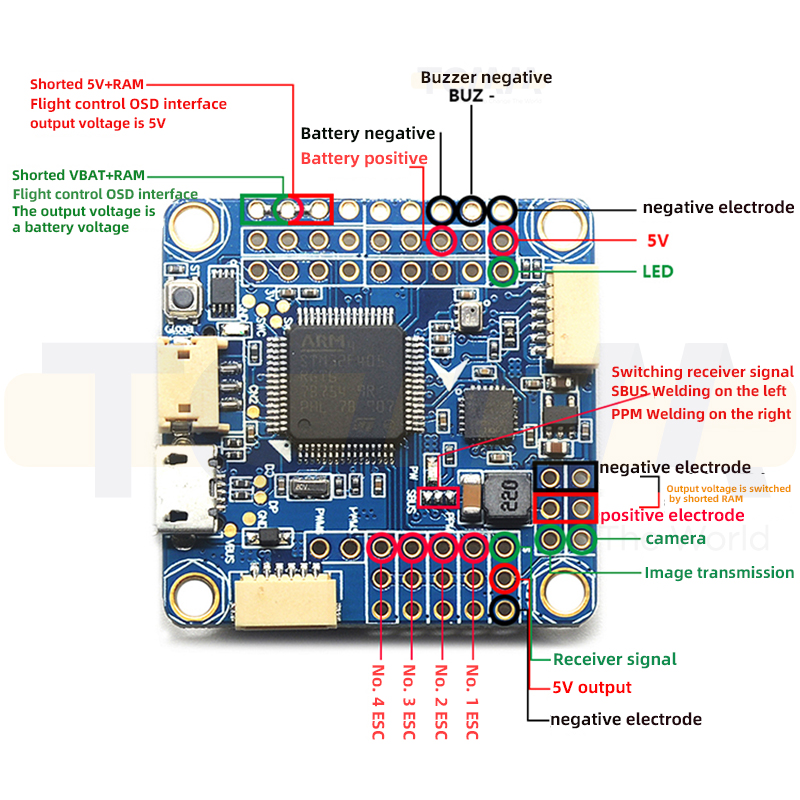 Характеристики: Target: OMNIBUSF4SD -STM32 F405 MCU -Dshot support -Drag and Drop OSD configured via Betaflight Configurator -Smartaudio v2 support – Tune your PID’s and configure the omnibus fc from your Transmitter -MPU6000 6 axis SPI Gyro & Accelerometer -SBUS/PPM AND Spektrum DSMX Ports -MicroSD card blackbox -Baro(BMP280) -5V 3A SBEC -On-board Video Filter(only can supply 5V to VTX and Camera) -SmartAudio V2 via tx6 on J10 -4×3 pin ESC pin layout -IR pins for lap timing transponder Standard Board Size: about 36x36mm Standard Size of Mount Hole: 30.5x30.5mm | шт. | 1005,60 | ||||||||||||||||||||||||||||||
| OMNIBUSF4-V3SP | OMNIBUS F4 V3S PLUS Betaflight Flight Controller w/OSD, Baro, LC Filter | Полетный контроллер OMNIBUS F4 V3S PLUS STM32F405, MPU6000, OSD, BMP280, 2x UARTs, 1x Softserial, 1x I2C для FPV дроновЕсть возможность прошивки ArdupilotДобавлено демпфирование платы Два независимых BEC на 5В и 9В Оптимизирована разводка площадок для пайки 
 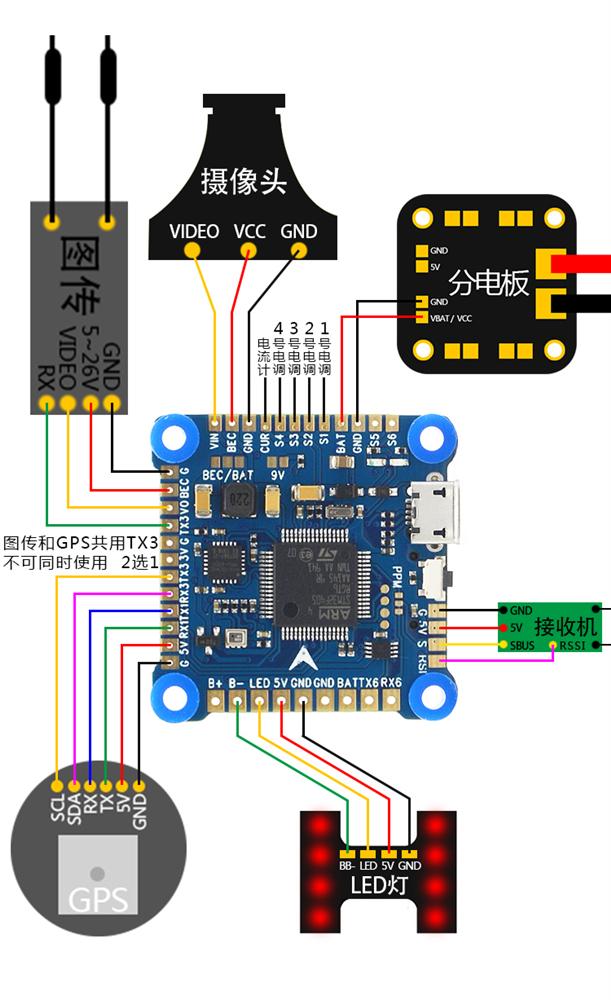 Характеристики: Target: OMNIBUSF4SD -STM32 F405 MCU -2-6S LiPo support -Dshot support -Drag and Drop OSD configured via Betaflight Configurator -Smartaudio v2 support – Tune your PID’s and configure the omnibus fc from your Transmitter -MPU6000 6 axis SPI Gyro & Accelerometer -SBUS/PPM AND Spektrum DSMX Ports -MicroSD card blackbox -Baro(BMP280) -5V 3A SBEC -9V 3A SBEC -On-board Video Filter(only can supply 5V to VTX and Camera) -SmartAudio V2 via tx6 on J10 -4×3 pin ESC pin layout -IR pins for lap timing transponder Standard Board Size: about 36x36mm Standard Size of Mount Hole: 30.5x30.5mm | шт. | 1099,88 | ||||||||||||||||||||||||||||||
| PIX-GPS-cps | PIX GPS Mini Module with Compass for Pixhawk [PIX-GPS-cps] | Мини модуль GPS+компас для полетных контроллеров PX4 PixhawkMini GPS Module with Compass for Pixhawk Interface Plug and PlayFeatures: With Compass Plug and Play Suitable for Pixhawk Standard Interface Specifications: Size 25 x 25 x 7mm Wire length:120mm Net Weight: 10g Notes: Because of the super mini size, there is no LED on the GPS, so you'd better use with OSD Package include: 1 x mini GPS 1 x Two-sided sticker GPSmodule | комплект | 937,83 | ||||||||||||||||||||||||||||||
| HK9387000082-0 | PixFalcon Micro PX4 Autopilot [9387000082-0] | Микро полетный контроллер PixFalcon Micro PX4 AutopilotThe PixFalcon Micro PX4 Autopilot is a high performance module suitable for fixed wing, multi-rotors, helicopters, cars, boats and any other robotic platform that can move. It can be recognised as a scaled down version of the popular PixHawk high end autopilot favoured by high-end researchers, amateurs and industrial designers but it is a more compact and lightweight unit.It is crammed with all the same features and specifications as its bigger brother but its smaller size makes it more compatible with models and designs that have a limited amount of space. 
 
 
 Features: • Built in Buzzer • 168MHz/252MIPS Cortex-M4F • 14 PWM/servo outputs (8 with failsafe and manual overide, 6 auxilary, high power compatible) • Abundant connectivity options for addition peripherals (UART, 12C) • Intergrated backup system for in-flight recovery and manual overide with dedicated processor and stand-alone power supply (fixed wing use) • Backup system integrates mixing, providing consistent autopilot and manual overide mixing modes (fixed wing use) • Onboard safety switch and external safety switch • Multi-color LED visual indicator • MicroSD card for high rate logging over extended periods of time Specs (Processor): • 32bit STM32F427 Cortex M4 Core with FPU • 168MHz • 256KB Ram • 2MB Flash • 32bit STM32F 103 Failsafe Co-processor Specs (Sensor): • ST Micro L3GD20H 16bit Gyroscope • ST Micro LSM303D 14bit Accelerometer/Magnetometer • Invensense MPU 6000 3 Axis Accelerometer/Gyroscope • MEAS MS5611 Barometer Specs (Interfaces): • 1 x UART Serial Port • Spektrum DSM/DSM2/DSM-X® Satellite Compatible Input • Futaba S BUS® Compatible Input/Output • PPM Sum Signal Input • 12C • Internal Micro USB Port Specs (Power system Protection): • Ideal Power Muliplexer with Automatic Current Limiter • All Peripheral Outputs are Over Current protected • All Inputs ESD Protected Specs Size: Size: 38x43x12mm Weight: 15.8g Voltage Ratings: Power Module Input: 4.1~5.5V USB Power Input: 4.1~5.5V Servo Rail Input: 0~10V (servo rail input is detected by PixFalcon) Note: PixFalcon can be double redundant on the power supply if 2 power sources are supplied. The 2 rails are: Power module input and USB input. Included: PixFalcon Micro PX4 Autopliot Multi output cable RCIN cable Safety switch 4pin cable 6pin cable USB cable Micro SD card *PX4/Pixhawk is an independent, open-source, open-hardware project aiming at providing a high-end autopilot to the academic, hobby and industrial communities (BSD licensed) **The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. | комплект | 6284,37 | ||||||||||||||||||||||||||||||
| Pixhack-M8N-set | Pixhack 2.8.4 Flight Controller with M8N GPS Module | Полетный контроллер Pixhack 2.8.4 32-bit Ultimate Flight Controller с модулем M8N GPS/compassHyperion quality products!Основанный на мощной платформе pixhawk с открытым исходным кодом, pixhack 2.8.4 был усовершенствован для обеспечения большего количества функций. Все порты аккуратно смонтированы по бокам, что позволяет горизонтально расположить проводку, а не распределять ее по всему корпусу. Встроенная виброгасящая конструкция обеспечивает постоянную устойчивость летательного аппарата. Features: Independent IMU unit, built-in floating vibration absorbing structure Advanced 32-bit ARM Cortex M4 high performance processor 8 nos PWM/servo output, Support upto 8-axis multi-copters Automatic & manual mode Redundancy power input and malfunction shifting function Multi-color LED Multi-tone Buzzer port Removal of ports like SPKT/DSM, CAN Procedure based on pixhawk, with variety of functions Ports like GPS/TELEM/POWER are the same as APM 2.5/2.6/2.8 Flight data logginh with Micro SD card Specifications: 32-BIT 2MB cache STM32F427 Cortex M4,with FPU. Basic frequency: 168MHZ, 256K RAM 32-BIT STM32F103 backup coprocessor L3GD20 3-axis 16-bit digital GYRO LSM303D 3-axis 14-bit accelerometer/magnetometer MPU6000 6-axis accelerometer/magnetometer MS5611 high precision barometer Connector Ports: Futaba SBUS support PPM signal input PWM signal output I2C port(1.25mm spacing, 4pin, JST) x 1 Telemetry prots(1.25mm spacing, 5pin JST) x 2 Powermodule port(1.25mm spacing, 6pin JST) x 1 GPS port(1.25mm spacing, 5pin JST) x 1 Included with the package: Pixhack 2.8.4 flight controller x 1 M8N GPS/Compass Module with stand x 1 Safety switch x 1 Buzzer x 1 Micro SD card x 1 SD card reader x 1 Cables x 2 *PX4/Pixhawk is an independent, open-source, open-hardware project aiming at providing a high-end autopilot to the academic, hobby and industrial communities (BSD licensed) **The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. | комплект | 3959,55 | ||||||||||||||||||||||||||||||
| FCPIX-ALU | Pixhack 2.8.4 Pro 32-bit Ultimate Flight Controller w/Aluminum CNC case | Полетный контроллер Pixhack 2.8.4 Pro в алюминиевом корпусеОснованный на мощной платформе pixhawk с открытым исходным кодом, pixhack 2.8.4 был усовершенствован для обеспечения большего количества функций. Все порты аккуратно смонтированы по бокам, что позволяет горизонтально расположить проводку, а не распределять ее по всему корпусу. Встроенная виброгасящая конструкция обеспечивает постоянную устойчивость летательного аппарата.Features: Independent IMU unit, built-in floating vibration absorbing structure Advanced 32-bit ARM Cortex M4 high performance processor 8 nos PWM/servo output, Support upto 8-axis multi-copters Automatic & manual mode Redundancy power input and malfunction shifting function Multi-color LED Multi-tone Buzzer port Removal of ports like SPKT/DSM, CAN Procedure based on pixhawk, with variety of functions Ports like GPS/TELEM/POWER are the same as APM 2.5/2.6/2.8 Flight data logginh with Micro SD card Specifications: 32-BIT 2MB cache STM32F427 Cortex M4,with FPU. Basic frequency: 168MHZ, 256K RAM 32-BIT STM32F103 backup coprocessor L3GD20 3-axis 16-bit digital GYRO LSM303D 3-axis 14-bit accelerometer/magnetometer MPU6000 6-axis accelerometer/magnetometer MS5611 high precision barometer Size: 69x45x16mm Weight: 55g Connector Ports: Futaba SBUS support PPM signal input PWM signal output I2C port(1.25mm spacing, 4pin, JST) x 1 Telemetry prots(1.25mm spacing, 5pin JST) x 2 Powermodule port(1.25mm spacing, 6pin JST) x 1 GPS port(1.25mm spacing, 5pin JST) x 1 Included with the package: Pixhack 2.8.4 flight controller x 1 Safety switch x 1 Buzzer x 1 Micro SD card x 1 SD card reader x 1 Cables x 2 *PX4/Pixhawk is an independent, open-source, open-hardware project aiming at providing a high-end autopilot to the academic, hobby and industrial communities (BSD licensed) **The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. | комплект | 3812,90 | ||||||||||||||||||||||||||||||
| PIX-SET-915M500 | Pixhawk 2.4.8 Flight Controller +M8N GPS+MinimOSD+PM+915MHz 500mW Telemetry [PIX-SET-915M500] | Полетный контроллер Pixhawk PX4 2.4.8 32 Bit Flight Controller с модулем M8N GPS/compass, MinimOSD, Power Module, Safety Switch, Buzzer, PPM Encoder, I2C splitter, 4G SD и телеметрией 915MHz 500mWIXHAWK - делает полет плавным и стабильным, благодаря высокой скорости обработки данных с современным 32 битным процессором ARM CortexM4 и технологичными сенсорами.Особенности Новый 32 битный процессор ARM CortexM4, c поддержкой RTOS Интегрированные в контроллер PX4FMU + PX4IO 14 PWM / Servo выход Дополнительные интерфейсы UART, I2C, CAN Система резервного питания Внешний аварийный выключатель Многоцветные LED индикаторы статуса работы со звуковыми сигналами Поддержка карт MicroSD для логгирования Характеристики Pixhawk Главный процессор: 32-bit 2 MB flash STM32F427 Cortex M4 Рабочая частота: 168 МГц Память: 256K Дополнительный процессор для FailSafe: STM32F103 Гироскоп: цифровой 3-х осевой 16 разрядный - L3GD20 Акселерометр\магнитометр 1: 3-х осевой - LSM303D Акселерометр\магнитометр 2: 6 осевой - MPU6000 Барометр: точный MS5611 Интерфейсы: 5 x UART, 2 x CAN, PPM вход, RSSI (PWM или вольтаж) вход, I2C, SPI Внутренний микро-порт USB и внешний микро USB порт Совместимо с: Spektrum DSM / DSM2 / DSMX Совместимый вход и выход: Futaba S.BUS Характеристики GPS Receiver type 72-channel u-blox M8 engine - GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1 - SBAS L1 C/A: WAAS, EGNOS, MSAS - Galileo-ready E1B/C (M8N) - Nav. update rate1 Single GNSS: up to 18 HZ - Concurrent GNSS: up to 10 Hz - Position accuracy2 2.0 m CEP - Acquisition2 Cold starts: 26 s - Aided starts: 2 s - Reacquisition: 1.5 s - Sensitivity2 Tracking & Nav: -167 dBm - Cold starts: -148 dBm - Hot starts: -156 dBm - OMA SUPL & 3GPP compliant - Oscillator TCXO , - Crystal - RTC crystal Built-In - Noise figure On-chip LNA . - Extra LNA for lowest noise figure - Anti jamming Active CW detection and removal. - Extra onboard SAW band pass filter - Memory ROM or Flash - Supported antennas Active and passive - Odometer Travelled distance - Data-logger For position, velocity, and time - Operating temp. -40° C to 85° C - Storage temp. -40° C to 85° C - -40° C to 105° C - RoHS compliant (lead-free) Комплектация Pixhawk контроллер - 1шт Модуль GPS с компасом Модуль питания 2-6S с BEC 3A Модуль MinimOSD Комплект радиотелеметрии 915МГц 500мВт Стойка GPS PPM енкодер 8 каналов i2c сплиттер Площадка виброразвязки для полетного контроллера Выносной USB/LED Кнопка Буззер SD карта | комплект | 6187,58 | ||||||||||||||||||||||||||||||
| RTS-PIX-SET-915M500V2 | Pixhawk 2.4.8 Flight Controller +M8N GPS+MinimOSD+PM+915MHz 500mW Telemetry V2 set [RTS-PIX-SET-915M | Полетный контроллер Pixhawk PX4 2.4.8 32 Bit Flight Controller с модулем M8N GPS/compass, MinimOSD, Power Module, Safety Switch, Buzzer, PPM Encoder, I2C splitter, 4G SD и телеметрией 915MHz 500mW V2IXHAWK - делает полет плавным и стабильным, благодаря высокой скорости обработки данных с современным 32 битным процессором ARM CortexM4 и технологичными сенсорами.Особенности Новый 32 битный процессор ARM CortexM4, c поддержкой RTOS Интегрированные в контроллер PX4FMU + PX4IO 14 PWM / Servo выход Дополнительные интерфейсы UART, I2C, CAN Система резервного питания Внешний аварийный выключатель Многоцветные LED индикаторы статуса работы со звуковыми сигналами Поддержка карт MicroSD для логгирования Характеристики Pixhawk Главный процессор: 32-bit 2 MB flash STM32F427 Cortex M4 Рабочая частота: 168 МГц Память: 256K Дополнительный процессор для FailSafe: STM32F103 Гироскоп: цифровой 3-х осевой 16 разрядный - L3GD20 Акселерометр\магнитометр 1: 3-х осевой - LSM303D Акселерометр\магнитометр 2: 6 осевой - MPU6000 Барометр: точный MS5611 Интерфейсы: 5 x UART, 2 x CAN, PPM вход, RSSI (PWM или вольтаж) вход, I2C, SPI Внутренний микро-порт USB и внешний микро USB порт Совместимо с: Spektrum DSM / DSM2 / DSMX Совместимый вход и выход: Futaba S.BUS Характеристики GPS Receiver type 72-channel u-blox M8 engine - GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1 - SBAS L1 C/A: WAAS, EGNOS, MSAS - Galileo-ready E1B/C (M8N) - Nav. update rate1 Single GNSS: up to 18 HZ - Concurrent GNSS: up to 10 Hz - Position accuracy2 2.0 m CEP - Acquisition2 Cold starts: 26 s - Aided starts: 2 s - Reacquisition: 1.5 s - Sensitivity2 Tracking & Nav: -167 dBm - Cold starts: -148 dBm - Hot starts: -156 dBm - OMA SUPL & 3GPP compliant - Oscillator TCXO , - Crystal - RTC crystal Built-In - Noise figure On-chip LNA . - Extra LNA for lowest noise figure - Anti jamming Active CW detection and removal. - Extra onboard SAW band pass filter - Memory ROM or Flash - Supported antennas Active and passive - Odometer Travelled distance - Data-logger For position, velocity, and time - Operating temp. -40° C to 85° C - Storage temp. -40° C to 85° C - -40° C to 105° C - RoHS compliant (lead-free) Комплектация Pixhawk контроллер - 1шт Модуль GPS с компасом Модуль питания 2-6S с BEC 3A Модуль MinimOSD Комплект радиотелеметрии 915МГц 500мВт V2 Стойка GPS PPM енкодер 8 каналов i2c сплиттер Площадка виброразвязки для полетного контроллера Выносной USB/LED Кнопка Буззер SD карта | комплект | 6536,40 | ||||||||||||||||||||||||||||||
| Pixhawk-915MHz-Lite-C | Pixhawk 915MHz Lite Combo | Полетный контроллер Pixhawk 915MHz Lite ComboPixhawk board:- Streamlined and optimized pixhawk board, easy to use and compatible with V2.4.5 or V2.4.6 - Getting rid of some unnecessary ports, like SPKT/DSM,BUZZER,CAN,SPI and USB pin port - Combining ADC 3.3V with ADC 6.6V ports - Mounting hole: Φ30mm - Size: 43x42mm Note: Standard APM and Pixhawk power module can be directly used in this pixhawk lite case(V2). Ublox Neo-M8N GPS - Quick satellite searching, taking only 10s to find 6 satellites in open space - Built-in compass, refresh rate up to 10GHz - GPS+BD+SBAS, or GPS+GLONASS+SBAS supported OSD - ATMEGA328P Microcontroller - MAX7456-EUI monochrome on-screen display - 5V/500mA DC/DC regulator for MAX7456-EUI - Operating voltage: 5V(FTDI connector) and 12V(Video I/O connector) - NTSC & PAL supported - FTDI connector - Full MAVLink protocol supported - Graphical configurator tool - Dimension: 19mmx39mm(without 0.1” pitch 90°connector) - Weight: 12g(cable included)  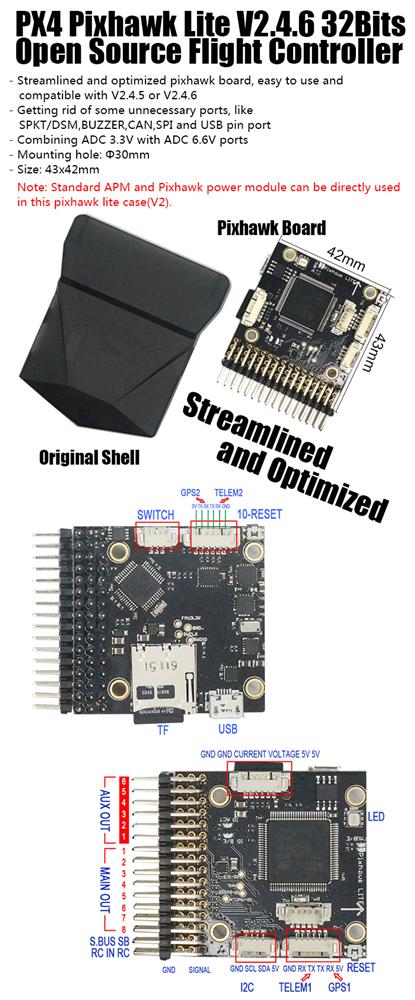  Package included: - 1* PX4 Pixhawk Lite V2.4.6 32Bits Open Source Flight Controller - 1* Original shell - 1* Safety button - 1* PPM module - 1* Pixhawk-I2C Splitter Expand Module - 1* NEO-M8N GPS - 1* Power Module(PM) - 1* OSD Module - 1* USB cable - 1* 3DR radio Data Transmission Module(915Mhz) | комплект | 8107,65 | ||||||||||||||||||||||||||||||
| apm-pwrmod-xt60-10s | Power module (APM&PX4) support to 10S battery, by HolyBro Hobby [apm-pwrmod-xt60-10s] | Датчик тока с поддержкой до 10S LiPo для APM, Pixhawk, с коннекторами XT60 и 6-контактным 150мм кабелем (с питанием контроллера!)HolyBro Hobby Power module (APM&PX4) support to 10S batteryThe on-board switching regulator outputs 5.3V at a maximum of 2.25A, and can be used up to 45Volts (10S LiPo) and at a maximum of 90 amps. The Power Module is ready to use with XT60 connectors pre-fitted, and shrink wrapped for protection. Specifications: Max input voltage: 45V Max current sensing:90A Switching regulator outputs: 5.3V at 2.25A max Connector: 6-pos Molex cable plugs directly to APM/PX4 'PM' connector Voltage and current measurement configured for: 5V ADC Power module Includes: DF13 6 Position Connector 150mm long Power Module with XT60 Connectors Notes: The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. | комплект | 1905,72 | ||||||||||||||||||||||||||||||
| HK9387000032-0 | Power Module 18V/90A XT60 Plug with BEC 2A and 6 Pin 150mm Cable for HKPilot [9387000032-0/43766] | Модуль питания/датчик тока для APM, Pixhawk, с коннекторами XT60 и 6-контактным 150мм кабелемМодуль питания APM 2.5 является одновременно как устройством питания для вашего APM и дополнительной периферии, так и средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM при помощи 6-контактного кабеля.Стабилизатор напряжения на плате выдает 5.3В при максимальном токе до 2.25А и может подключаться к источнику питания до 18В (4S LiPo) и 90А. Модуль закрыт защитной термоусадочной пленкой и имеет коннекторы XT60. Обратите внимание: Модуль расчитан на 2.25А только для питания APM, приемника и периферийных устройств (GPS и телеметрии). Как источник питания для сервоприводов используйте регулятор ESC c соответствующим ему или отдельным модулем BEC, поключенными к выходной шине, и удалите перемычку 1 для изоляции двух силовых линий. Характеристики: Макс. входное напряжение: 18В Макс. ток зондирования: 90А Выходные параметры стабилизатора: 5.3В при максимуме 2.25А Кабель Molex 6-контактный, подключается напрямую к APM Измерение напряжения и тока настроено для 5В аккумуляторов В комплект входит: Коннектор DF13 6-контактный длиной 150мм Модуль питания APM с коннекторами XT60 | комплект | 1161,47 | ||||||||||||||||||||||||||||||
| APM-pwrmod-XT60-GM-V1 | Power Module 20V/90A XT60 Plug GM V1.0 with BEC 2A for APM [APM-pwrmod-XT60-GM-V1] | Модуль питания/датчик тока 90A с поддержкой до 20В для APM, Pixhawk, с коннекторами XT60 и 6-контактным 200мм кабелемМодуль питания APM 2.5 является одновременно как устройством питания для вашего APM и дополнительной периферии, так и средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM при помощи 6-контактного кабеля.Стабилизатор напряжения на плате выдает 5.3В при максимальном токе до 2.25А и может подключаться к источнику питания до 20В (4S LiPo) и 90А. Модуль имеет коннекторы XT60. Обратите внимание: Модуль расчитан на 2.25А только для питания APM, приемника и периферийных устройств (GPS и телеметрии). Как источник питания для сервоприводов используйте регулятор ESC c соответствующим ему или отдельным модулем BEC, поключенными к выходной шине, и удалите перемычку 1 для изоляции двух силовых линий. Характеристики: Макс. входное напряжение: 20В Макс. ток зондирования: 90А Выходные параметры стабилизатора: 5.3В при максимуме 2.25А Кабель Molex 6-контактный, подключается напрямую к APM Размеры: 25mm x 21mm x 9mm Масса: 17g В комплект входит: Коннектор 1.25mm 6-контактный длиной 200мм Модуль питания APM с коннекторами XT60 | комплект | 389,36 | ||||||||||||||||||||||||||||||
| APM-pwrmod-XT60-V6 | Power Module 30V/90A XT60 Plug V6.0 with BEC 3A for APM [APM-pwrmod-XT60-V6] | Модуль питания/датчик тока 90A с поддержкой до 30В для APM, Pixhawk, с коннекторами XT60 и 6-контактным 150мм кабелемМодуль питания APM 2.5 является одновременно как устройством питания для вашего APM и дополнительной периферии, так и средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM при помощи 6-контактного кабеля.Стабилизатор напряжения на плате выдает 5.3В при максимальном токе до 3А и может подключаться к источнику питания до 30В (7S LiPo) и 90А. Модуль имеет коннекторы XT60. Обратите внимание: Модуль расчитан на 3А только для питания APM, приемника и периферийных устройств (GPS и телеметрии). Как источник питания для сервоприводов используйте регулятор ESC c соответствующим ему или отдельным модулем BEC, поключенными к выходной шине, и удалите перемычку 1 для изоляции двух силовых линий. Характеристики: Макс. входное напряжение: 20В Макс. ток зондирования: 90А Выходные параметры стабилизатора: 5.3В при максимуме 3А Кабель Molex 6-контактный, подключается напрямую к APM Размеры: 25mm x 21mm x 9mm Масса: 17g В комплект входит: Коннектор 1.25mm 6-контактный длиной 150мм Модуль питания APM с коннекторами XT60 | комплект | 502,80 | ||||||||||||||||||||||||||||||
| F07638 | Power Module 30V/90A XT60 Plug with BEC 3A for APM, Pixhawk [F07638] | Модуль питания/датчик тока 90A с поддержкой до 30В для APM, Pixhawk, с коннекторами XT60 и 6-контактным 150мм кабелемМодуль питания APM 2.5 является одновременно как устройством питания для вашего APM и дополнительной периферии, так и средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM при помощи 6-контактного кабеля.Стабилизатор напряжения на плате выдает 5.3В при максимальном токе до 3А и может подключаться к источнику питания до 30В (7S LiPo) и 90А. Модуль имеет коннекторы XT60. Обратите внимание: Модуль расчитан на 3А только для питания APM, приемника и периферийных устройств (GPS и телеметрии). Как источник питания для сервоприводов используйте регулятор ESC c соответствующим ему или отдельным модулем BEC, поключенными к выходной шине, и удалите перемычку 1 для изоляции двух силовых линий. 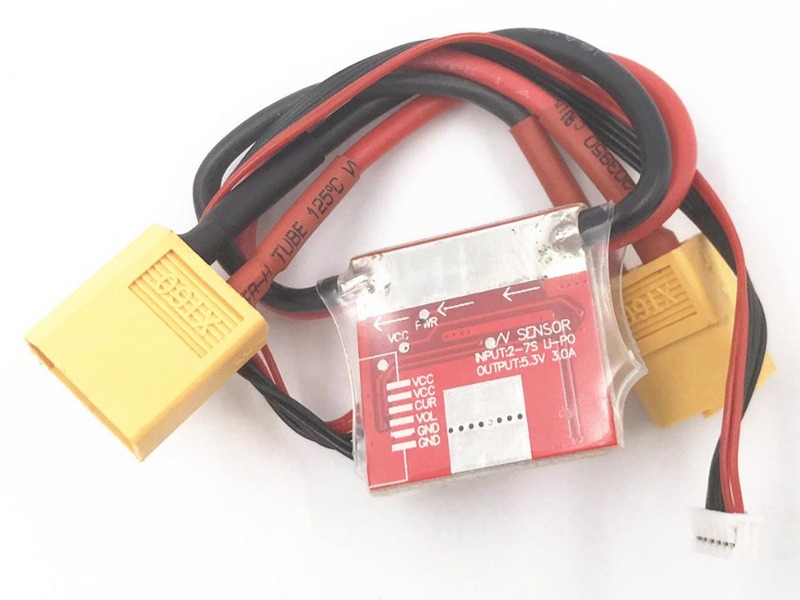
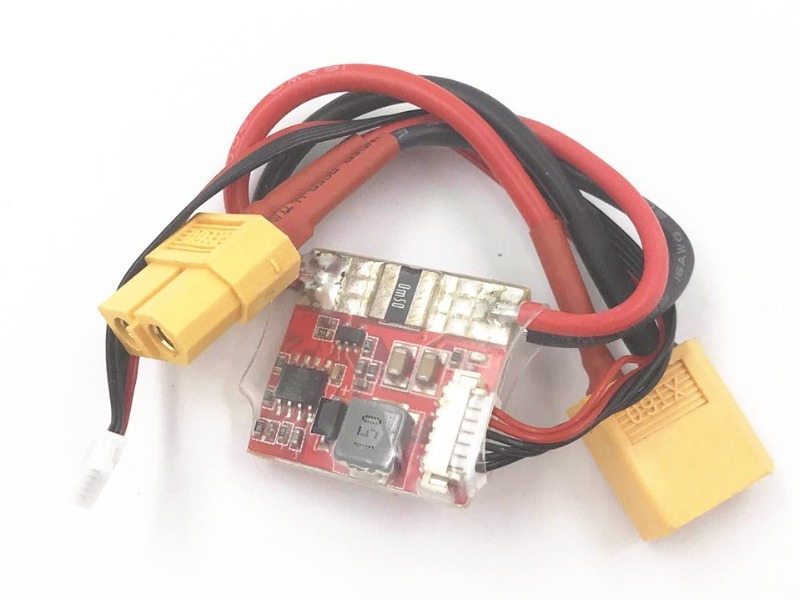 Характеристики: Макс. входное напряжение: 30В Макс. ток зондирования: 90А Выходные параметры стабилизатора: 5.3В при максимуме 3А Кабель Molex 6-контактный, подключается напрямую к APM Размеры: 25mm x 21mm x 9mm Масса: 17g В комплект входит: Коннектор 1.25mm 6-контактный длиной 150мм Модуль питания APM с коннекторами XT60 | комплект | 351,96 | ||||||||||||||||||||||||||||||
| APM-pwrmod-XT60-30V | Power Module 30V/90A XT60 Plug with BEC 3A Ouput for APM 2.6/Pixhawk [APM-pwrmod-XT60-30V] | Модуль питания с датчиком тока 90A с поддержкой до 30В для APM, Pixhawk, с коннекторами XT60 и 6-контактным 150мм кабелем (3A 5V UBEC)Specification:Input voltage: 6~30V Output voltage: 5.3V±0.1V Output current: 3A Max measurement current: 90A Max Voltage: 30V XT60 Plug With 6P connection cable can be used to connect APM/Pixhawk flight control With 4p hole Size: 25mm x 21mm x 9mm Weight: 17g Package list: 1 * Power Module 1 * APM/Pixhawk connection cable 6P 150mm 1 * 12AWG cable 50mm (2pcs black and 2pcs red) | комплект | 317,60 | ||||||||||||||||||||||||||||||
| GLB-104871 | Power Module 30V/90A XT60 Plug with BEC 3A V1.0 for APM2.5.2. APM2.6, Pixhawk [GLB-104871] | Модуль питания/датчик тока для APM, Pixhawk, с коннекторами XT60 и 6-контактным 200мм кабелемМодуль является одновременно как устройством питания для вашего APM и дополнительной периферии, так и средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM2.5.2, APM2.6, Pixhawk при помощи 6-контактного кабеля.Стабилизатор напряжения на плате выдает 5.3В при максимальном токе до 2.25А и может подключаться к источнику питания до 30В (7S LiPo) и 90А. Модуль имеет коннекторы XT60. 
 Обратите внимание: Модуль расчитан на 3А только для питания APM, приемника и периферийных устройств (GPS и телеметрии). Как источник питания для сервоприводов используйте регулятор ESC c соответствующим ему или отдельным модулем BEC. Характеристики: Макс. входное напряжение: 30В Макс. ток зондирования: 90А Выходные параметры стабилизатора: 5.3В при максимуме 3А Кабель Molex 6-контактный, подключается напрямую к APM Размеры: 25 x 21 x 9мм Масса: 17г В комплект входит: Коннектор DF13 6-контактный длиной 200мм Модуль питания APM с коннекторами XT60 | комплект | 460,90 | ||||||||||||||||||||||||||||||
| 3DRC-PM-12S | Power Module 50V/90A XT60 Plug V6.0 (HV) with BEC 3A for APM [3DRC-PM-12S] | Модуль питания/датчик тока 90A с поддержкой до 50В для APM, с коннекторами XT60 и 6-контактным 150мм кабелемМодуль питания APM 2.5 является одновременно как устройством питания для вашего APM и дополнительной периферии, так и средством передачи данных о напряжении и токе батареи на APM. Эти данные можно просматривать в логах APM или вживую при помощи телеметрии. Модуль подсоединяется к соответствующему разъему APM при помощи 6-контактного кабеля.Стабилизатор напряжения на плате выдает 5.3В при максимальном токе до 3А и может подключаться к источнику питания до 50В (12S LiPo) и 90А. Модуль имеет коннекторы XT60. Обратите внимание: Модуль расчитан на 3А только для питания APM, приемника и периферийных устройств (GPS и телеметрии). Как источник питания для сервоприводов используйте регулятор ESC c соответствующим ему или отдельным модулем BEC, поключенными к выходной шине, и удалите перемычку 1 для изоляции двух силовых линий. Характеристики: Макс. входное напряжение: 50В Макс. ток зондирования: 90А Выходные параметры стабилизатора: 5.3В при максимуме 3А Кабель Molex 6-контактный, подключается напрямую к APM Размеры: 25mm x 21mm x 9mm Масса: 17g В комплект входит: Коннектор DF13 6-контактный длиной 150мм Модуль питания APM с коннекторами XT60 | комплект | 544,78 | ||||||||||||||||||||||||||||||
| GLB-107396 | PX4 Pixhawk V2.4.5 32Bits Flight Controller with Ublox NEO-7N GPS 3 axis Compass Combo [GLB-107396] | Полетный контроллер PX4 Pixhawk V2.4.5 32Bits Flight Controller with Ublox NEO-7N GPS 3 axis Compass ComboPX4 Pixhawk V2.4.5 32Bits Flight ControllerImprovements on V2.4.3 - V2.4.5 PCB board - Redeveloped and optimized circuit without changing components - Could use Official MissionPlanner, ECLIPSE firmware upgrade 
 
 
 
 Key Features: - 168 MHz / 252 MIPS Cortex-M4F - 14 PWM / Servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible) - Abundant connectivity options for additional peripherals (UART, I2C, CAN) - Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply (fixed-wing use) - Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed wing use) - Redundant power supply inputs and automatic failover - External safety switch - Multicolor LED main visual indicator - High-power, multi-tone piezo audio indicator - microSD card for high-rate logging over extended periods of time PX4 Hareware download: https://github.com/PX4/Hardware Mission Planner 1.39:http://firmware.diydrones.com/ Specifications: Processor - 32bit STM32F427 Cortex M4 core with FPU - 168 MHz - 256 KB RAM - 2 MB Flash - 32 bit STM32F103 failsafe co-processor Sensors - ST Micro L3GD20H 16 bit gyroscope - ST Micro LSM303D 14 bit accelerometer / magnetometer - MEAS MS5611 barometer Interfaces - 5x UART (serial ports), one high-power capable, 2x with HW flow control - 2x CAN (one with internal 3.3V transceiver, one on expansion connector) - Spektrum DSM / DSM2 / DSM-X® Satellite compatible input - Futaba S.BUS® compatible input and output - PPM sum signal input - RSSI (PWM or voltage) input - I2C - SPI - 3.3 and 6.6V ADC inputs - Internal microUSB port and external microUSB port extension Power System and Protection - Ideal diode controller with automatic failover - Servo rail high-power (max. 10V) and high-current (10A+) ready - All peripheral outputs over-current protected, all inputs ESD protected NEO-7N Specifications: - Size: 35*35mm - Cable compatible with APM flight controller firmware  Package Included: - PX4 V2.4.5 Flight board - Teflon safety switch - Buzzer - PX4 Original cover - External LED - 1* Ublox NEO-7N GPS module - 1* GPS with Stand and Sticker | комплект | 9314,37 | ||||||||||||||||||||||||||||||
| QUAD-CON16K | QUAD-CON16K HobbyKing Quadcopter Control Board V2 (Atmega168PA) | Полетный контроллер для квадрокоптера - HobbyKing Quadcopter Control Board V2 (Atmega168PA) - без прошивки.Изготовлена на популярной и хорошо поддерживаемой платформе KK Control board, плата Hobbyking Quadcopter control board с оптимальным соотношением цены/качества, несет "квадрокоптерную лихорадку" в массы!
Контроллер HobbyKing Quadcopter - это блок управления полетом для 4-роторных летательных аппаратов (Квадрокоптеры/Quadcopters). Выполняет функцию стабилизации в полете, получая сигналы от трех бортовых гироскопов (крен, тангаж, рыскание) и пеедавая их на микроконтроллер Atmega168PA IC. The Atmega168PA IC в свою очередь обрабатывает полученные сигналы в соответствии с установленной прошивкой и дает команды на регуляторы оборотов электродвигателей (ESC), подстраивая обороты моторов и стабилизируя аппарат. 
.jpg)
Прошиваем любую из поддерживаемых прошивок: | комплект | 1466,50 | ||||||||||||||||||||||||||||||
| BGID1240423 | Radiolink Mini PIX F4 Flight Controller MPU6500 w/ TS100 M8N GPS UBX-M8030, PDB [1240423] | Полетный контроллер Radiolink MiniPIX F4 с GPS/Compass TS100 M8N, платой питания 2-6S с 5V BEC и датчиком тока - для коптеров и самолетовDescription: PIX F4 Flight Controller: 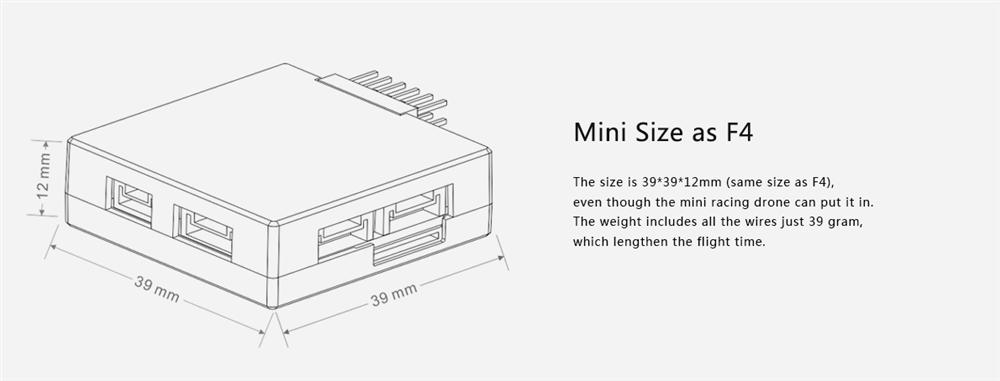  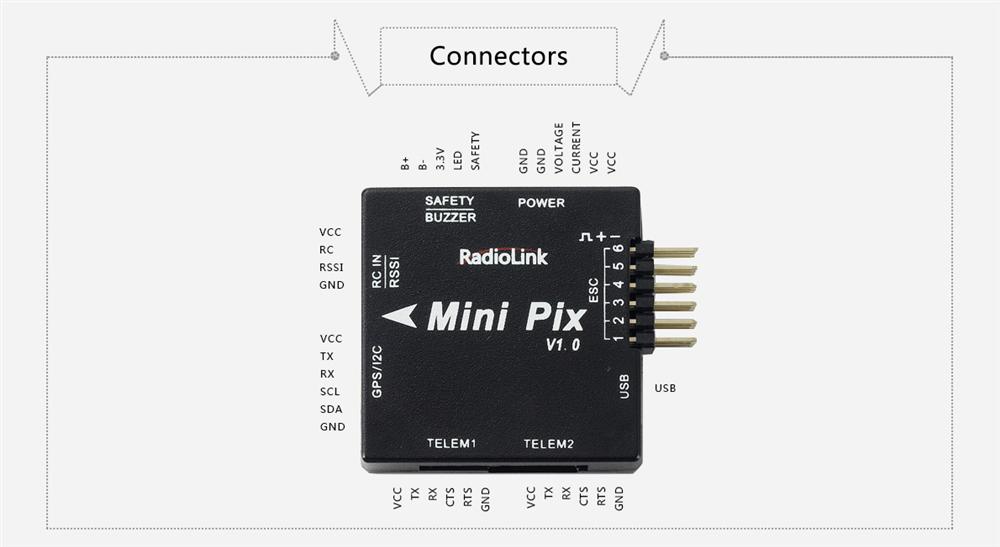  
 TS100 Mini M8N GPS Module: Sensitivity:  Connect ports: Ports: Top configuration: 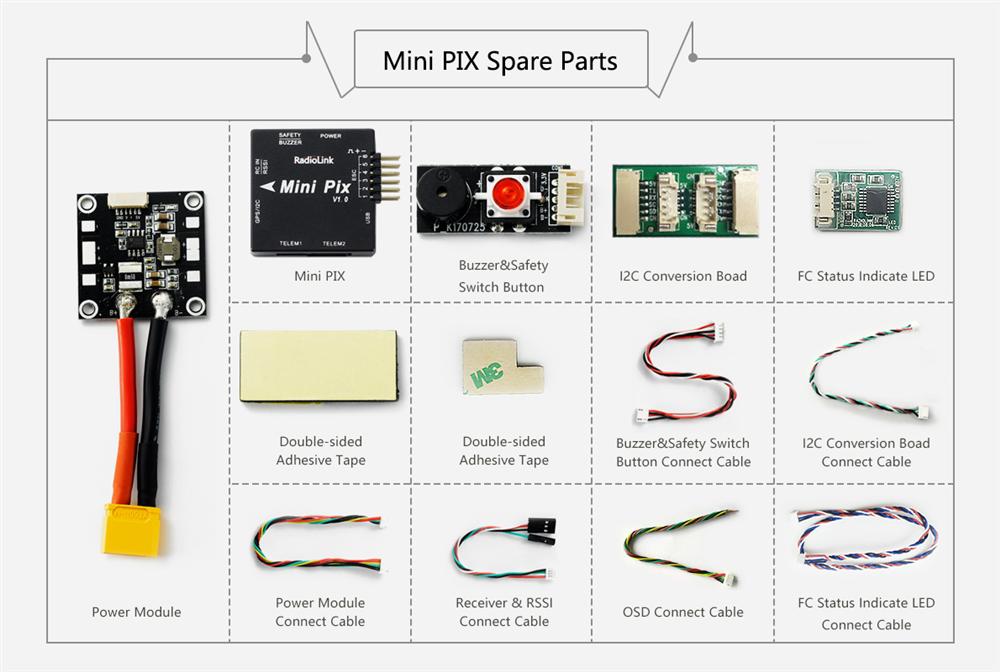 Package included: | комплект | 3581,82 | ||||||||||||||||||||||||||||||
| RLK-PIXHAWK-SE100 | RadioLink Pixhawk Flight Controller w/SE100 GPS M8N Module, 2-6S Power module [RLK-PIXHAWK-SE100] | Полетный контроллер Radiolink Pixhawk с модулем GPS/Compass M8N SE100 модулем питанияPIXHAWK - делает полет плавным и стабильным, благодаря высокой скорости обработки данных с современным 32 битным процессором ARM CortexM4 и технологичными сенсорами.Особенности Новый 32 битный процессор ARM CortexM4, c поддержкой RTOS Интегрированные в контроллер PX4FMU + PX4IO 14 PWM / Servo выход Дополнительные интерфейсы UART, I2C, CAN Система резервного питания Внешний аварийный выключатель Многоцветные LED индикаторы статуса работы со звуковыми сигналами Поддержка карт MicroSD для логгирования 
 
 Характеристики Pixhawk Главный процессор: 32-bit 2 MB flash STM32F427 Cortex M4 Рабочая частота: 168 МГц Память: 256K Дополнительный процессор для FailSafe: STM32F103 Гироскоп: цифровой 3-х осевой 16 разрядный - L3GD20 Акселерометр\магнитометр 1: 3-х осевой - LSM303D Акселерометр\магнитометр 2: 6 осевой - MPU6000 Барометр: точный MS5611 Интерфейсы: 5 x UART, 2 x CAN, PPM вход, RSSI (PWM или вольтаж) вход, I2C, SPI Внутренний микро-порт USB и внешний микро USB порт Совместимо с: Spektrum DSM / DSM2 / DSMX Совместимый вход и выход: Futaba S.BUS Характеристики GPS SE100 Чип GPS-декодера: U-blox UBX-M8030 (M8), 72-канальный, MMIC BGA715L7 от Infineon Геомагнитный компас: HMC5983 от Honeywell Антенна: 2.5dbi с высоким коэффициентом усиления Двойной фильтр: SAWF (фильтр поверхностной акустической волны) Точность измерения скорости: 0,1 м/с Максимальная высота: 50000 м Максимальная скорость: 515 м/с Максимальное ускорение: 4G Максимальная скорость обновления: до 18 Гц Чувствительность GPS: -167dB Питание: 5V постоянного тока +-5%, ток 50 - 55mА Порт A: интерфейс GPS UART, скорость передачи в бодах: 1.2K, 4.8K, 9.6K, 19.2K, 38.4K, 57.6K, 112.5K Порт B: геомагнитный интерфейс I2C Размер: 49 x 43 x 16мм Вес: 34.9 г Комплектация Pixhawk контроллер - 1шт Модуль GPS с компасом SE100 Модуль питания 2-6S с BEC 3A Стойка GPS Кнопка - 1шт Буззер - 1шт SD карта - 1шт | комплект | 5807,34 | ||||||||||||||||||||||||||||||
| RLK-SE100 | Radiolink SE100 M8N GPS Module UBX-M8030 for PIXHAWK [RLK-SE100] | Модуль GPS Radiolink SE100 Mini M8N UBX-M8030 с компасом для APM, Pixhawk (micro JST 6pin+4pin)Совместим для работы с ПК на прошивках Ardupilot, iNav, Betaflight и пр.Особенности Чип GPS: Radiolink M8N GPS, с U-Blox UBX-M8030 (M8), 72-канальный, MMIC BGA715L7 от Infineon Компас: HMC5983 от Honeywell Антенна: керамическая антенна с высоким коэффициентом усиления 2.5dBi Двойной фильтр: SAWF (Фильтр поверхностных акустических волн) от Murata 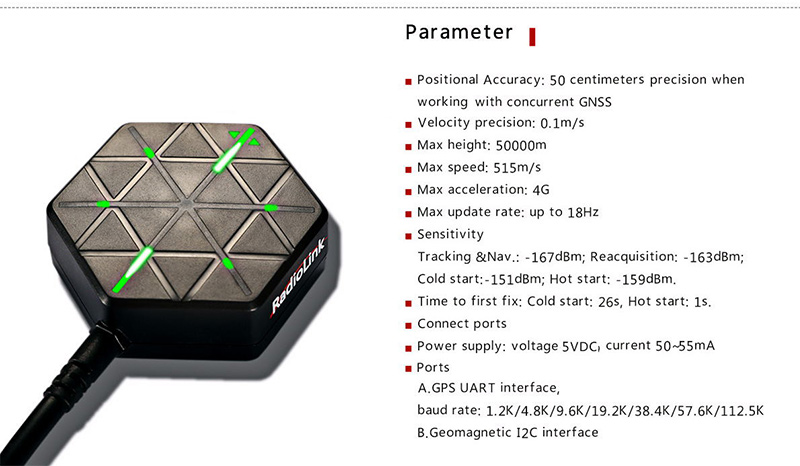  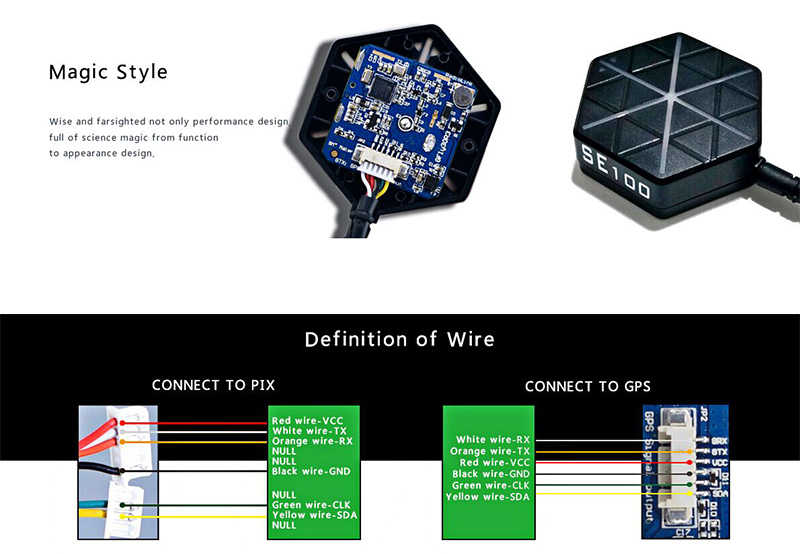 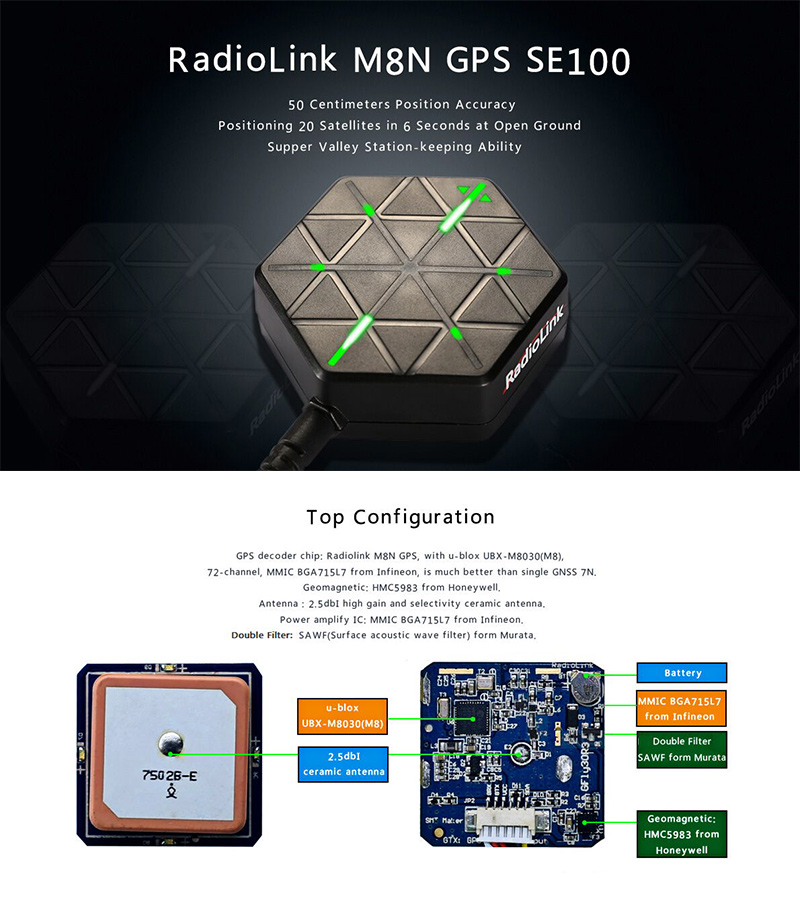 Характеристики: Модель: SE100 M8N GPS Точность позиционирования: 0.5м Шаг скорости измерения: 0.1м/с Максимальная высота: 50000м Максимальная скорость: 515м/с Максимальное ускорение: 4G Максимальная скорость обновления: до 10Гц Чувствительность Отслеживание и навигация: -167dBm Обновление: -163dBm Холодный старт: -151dBm Горячий старт: -159dBm Время до первого срабатывания: Холодный старт: 26 сек Горячий старт: 1 сек Питание: 5V DC, 50 - 55mA Порты: GPS UART интерфейс, геомагнитный I2C интерфейс Размеры: 49 x 43 x 16 мм Вес: 35 г  GPSmodule | шт. | 1407,84 | ||||||||||||||||||||||||||||||
| RLK-TS100-PIX | Radiolink TS100 Mini M8N GPS Module UBX-M8030 for APM, Pixhawk [RLK-TS100-PIX] | Модуль GPS Radiolink TS100 Mini M8N UBX-M8030 с компасом для APM, Pixhawk (micro JST 6pin+4pin)Совместим для работы с ПК на прошивках Ardupilot, iNav, Betaflight и пр.Особенности Чип GPS: Radiolink M8N GPS, с U-Blox UBX-M8030 (M8), 72-канальный Компас: QMC5883L, работающий по той же технологии, что и HMC5983 Антенна: керамическая антенна с высоким коэффициентом усиления 2.5dBi Двойной фильтр: SAWF (Фильтр поверхностных акустических волн) от Murata  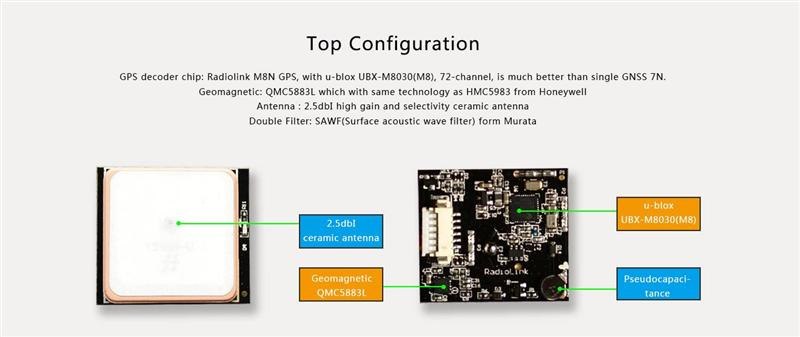 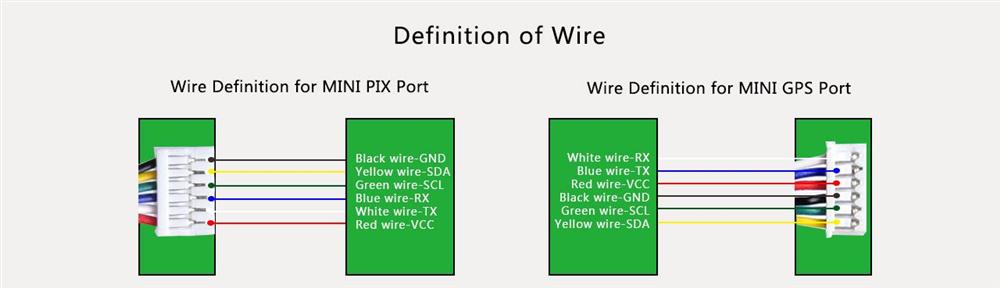 Характеристики: Модель: TS100 mini M8N GPS Точность позиционирования: 0.5м Шаг скорости измерения: 0.1м/с Максимальная высота: 50000м Максимальная скорость: 515м/с Максимальное ускорение: 4G Максимальная скорость обновления: до 10Гц Чувствительность Отслеживание и навигация: -167dBm Обновление: -163dBm Холодный старт: -151dBm Горячий старт: -159dBm Время до первого срабатывания: Холодный старт: 26 сек Горячий старт: 1 сек Питание: 5V DC, 50 - 55mA Порты: GPS UART интерфейс, геомагнитный I2C интерфейс Размеры: 32 х 30 х 12 мм Вес: 20 г GPSmodule | шт. | 1114,54 | ||||||||||||||||||||||||||||||
| RLK-TS100 | Radiolink TS100 Mini M8N GPS Module UBX-M8030 for Mini PIX [RLK-TS100] | Модуль GPS Radiolink TS100 Mini M8N UBX-M8030 с компасом для Radiolink MiniPIX (JST-GH 6pin)Совместим для работы с ПК на прошивках Ardupilot, iNav, Betaflight и пр.Особенности Чип GPS: Radiolink M8N GPS, с U-Blox UBX-M8030 (M8), 72-канальный Компас: QMC5883L, работающий по той же технологии, что и HMC5983 Антенна: керамическая антенна с высоким коэффициентом усиления 2.5dBi Двойной фильтр: SAWF (Фильтр поверхностных акустических волн) от Murata  Характеристики: Модель: TS100 mini M8N GPS Точность позиционирования: 0.5м Шаг скорости измерения: 0.1м/с Максимальная высота: 50000м Максимальная скорость: 515м/с Максимальное ускорение: 4G Максимальная скорость обновления: до 10Гц Чувствительность Отслеживание и навигация: -167dBm Обновление: -163dBm Холодный старт: -151dBm Горячий старт: -159dBm Время до первого срабатывания: Холодный старт: 26 сек Горячий старт: 1 сек Питание: 5V DC, 50 - 55mA Порты: GPS UART интерфейс, геомагнитный I2C интерфейс Размеры: 32 х 30 х 12 мм Вес: 20 г GPSmodule | шт. | 1114,54 | ||||||||||||||||||||||||||||||
| rvvibrationmount | RV RangeVideo anti-vibration mount [rvvibrationmount] | Антивибрационная площадка для электроники- Simple , strong and effective anti-vibration mount- Attach to RVOSD with double sided tape.    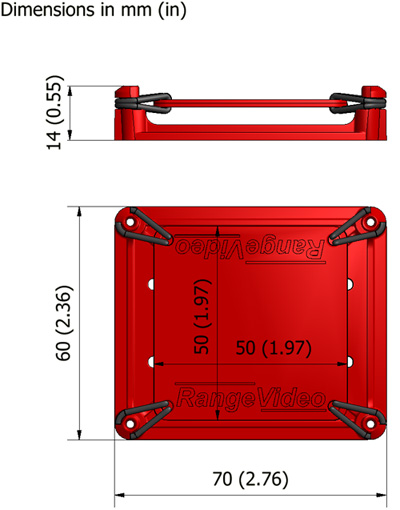 | комплект | 733,25 | ||||||||||||||||||||||||||||||
| RVGS | RVGS RangeVideo Ground Station Antenna Tracker | Наземная следящая FPV станция RVGS Antenna TrackerRVGS antenna tracker for the RVOSD. Required: pan and tilt servos and antenna tracking mount. Purchase Included Specifications   V_ACCS V_ANTENNA | комплект | 9427,50 | ||||||||||||||||||||||||||||||
| RV-airspeed_kit | RVOSD Airspeed Kit with MPXV7002DP and Pitot [RV-airspeed_kit] | Датчик воздушной скорости MPXV7002DP с трубкой Пито для автопилота RVOSD1 x MPXV7002DP sensor1 x RVOSD Airspeed Kit spare silicone tubing 80mm length 1 x RangeVideo Pitot Tube | комплект | 1382,07 | ||||||||||||||||||||||||||||||
| RV-OSD | RV-OSD RangeVideo OSD | Блок телеметрии RangeVideo OSD с функциями автопилота и возврата домой.Комплектация:(1) RVOSD (1) GPS (1) 70A датчик тока (1) IR пульт дистанционного управления (для наземных настроек) (4) 150мм сервоудлинители папа-папа Встроенные датчики: — 2x Гироскопы — 1x акселлерометр — Барометрический датчик высоты — Магнитометр  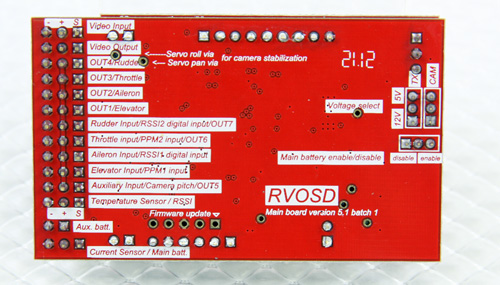  -3 axis camera stabilization (requires soldering your servo wires to RVOSD main board). — NEW AHI with pitch degree markers. — FOV ratio adjust for new AHI display - — Load waypoints via USB PC program. http://calou.favier.free.fr/RvosdSequencer/RvosdSequencer.htm — Loiter radius setting for return to home and waypoints. — Improved barometric altitude sensor — Airspeed sensor support (requires buying an additional airpseed sensor and pitot tube) -Voltage display of main and video battery -Voltage range: 6 — 30V -Current display up to 70A, soon available up to 140A with a different current sensor. -Up to 50’000 mAh battery usage display -GPS altitude -GPS ground speed -GPS coordinates -GPS number of satellites -GPS heading -GPS variometer -Ground distance to home -Line of sight distance to home -Elevation -Artificial horizon -Date -Temperature -Elapsed time -Call sign -RSSI display and inputs analog or digital -Five servo inputs for connection to regular RC receivers, also supports combined PPM inputs for two separated receivers, is possible to display RSSI for each one -Dual receiver inputs, RVOSD switch to second receiver if main receiver had lost R/C signal -G-force display up to 8G -Flight summary display of Altitude, speed, range, distance traveled, current and G-force -Six display modes. Advanced, simple, radar, Raw sensor inputs, GPS signal and no OSD screen -Display GPS satellites in view signal level and position -User can configure the OSD display width -Metric/imperial units selection -Configuration of all OSD parameters via infrared control, physical access to the OSD board not needed for configuration, no computer required -Configuration of in-flight menu items via RC transmitter, only one extra auxiliary channel required for accessing all OSD-autopilot options -On screen display items can be enabled-disabled or moved to different positions -Range warning -Voltage warning -Battery capacity warning -Lost signal warning -RSSI level warning -Elevation warning -GPS fail warning -Autopilot modes, Return home, Level flight, Heading hold, Position hold, Fly by wire and waypoint navigation. -Is possible to set up to 15 3D waypoints via remote control -Programmable virtual fence to keep airplane at safe distance on waypoint navigation mode -Automatic return home if virtual fence distance exceeded, RC signal lost or latest waypoint reached -Automatic selection of PAL NTSC -Buffered video input and output processing, plug and play with all FPV cameras -Integrated GPS backup battery -Integrated temperature sensor, external temperature sensor optional -Current draw 85mA@12V -Provides filtered voltage 5V or 12V for both camera and video transmitter -Automatic selection of voltage input from higher voltage battery -Adjust of most autopilot features via configuration wizard -Dual level throttle management on autopilot mode for optimum battery usage -Upgradeable firmware- requires Pickit -Home setting automatically -Detects R/C link lost by glitch counter or failsafe level -Detection of failsafe on the throttle channel configurable for over or under normal throttle range -Display estimated maximum range left -Board position can be configured by software to be rolled -Neutral attitude adjustable via software -Attitude input from integrated IMU -Attitude input from external IR sensors (optional) -Turn and climb rate display -G-force display -Adjustable artificial horizon size and position -Autopilot controls four servo output channels for regular airplanes with elevator, aileron, throttle and rudder. Supports differential ailerons airplanes and flying wings with elevons -Barometric altitude -Barometric variometer -Barometric pressure -All parameters on the screen redraw at 50-60Hz, high refresh rate for smooth relaxing display | комплект | 18165,75 | ||||||||||||||||||||||||||||||
| RV-OSD_USED | RV-OSD RangeVideo OSD (used) | Блок телеметрии RangeVideo OSD с функциями автопилота и возврата домой (Б/У, в отличном состоянии).Комплектация:(1) RVOSD (1) GPS (1) 70A датчик тока (1) IR пульт дистанционного управления (для наземных настроек) (4) 150мм сервоудлинители папа-папа Встроенные датчики: — 2x Гироскопы — 1x акселлерометр — Барометрический датчик высоты — Магнитометр -3 axis camera stabilization (requires soldering your servo wires to RVOSD main board). — NEW AHI with pitch degree markers. — FOV ratio adjust for new AHI display - — Load waypoints via USB PC program. http://calou.favier.free.fr/RvosdSequencer/RvosdSequencer.htm — Loiter radius setting for return to home and waypoints. — Improved barometric altitude sensor — Airspeed sensor support (requires buying an additional airpseed sensor and pitot tube) -Voltage display of main and video battery -Voltage range: 6 — 30V -Current display up to 70A, soon available up to 140A with a different current sensor. -Up to 50’000 mAh battery usage display -GPS altitude -GPS ground speed -GPS coordinates -GPS number of satellites -GPS heading -GPS variometer -Ground distance to home -Line of sight distance to home -Elevation -Artificial horizon -Date -Temperature -Elapsed time -Call sign -RSSI display and inputs analog or digital -Five servo inputs for connection to regular RC receivers, also supports combined PPM inputs for two separated receivers, is possible to display RSSI for each one -Dual receiver inputs, RVOSD switch to second receiver if main receiver had lost R/C signal -G-force display up to 8G -Flight summary display of Altitude, speed, range, distance traveled, current and G-force -Six display modes. Advanced, simple, radar, Raw sensor inputs, GPS signal and no OSD screen -Display GPS satellites in view signal level and position -User can configure the OSD display width -Metric/imperial units selection -Configuration of all OSD parameters via infrared control, physical access to the OSD board not needed for configuration, no computer required -Configuration of in-flight menu items via RC transmitter, only one extra auxiliary channel required for accessing all OSD-autopilot options -On screen display items can be enabled-disabled or moved to different positions -Range warning -Voltage warning -Battery capacity warning -Lost signal warning -RSSI level warning -Elevation warning -GPS fail warning -Autopilot modes, Return home, Level flight, Heading hold, Position hold, Fly by wire and waypoint navigation. -Is possible to set up to 15 3D waypoints via remote control -Programmable virtual fence to keep airplane at safe distance on waypoint navigation mode -Automatic return home if virtual fence distance exceeded, RC signal lost or latest waypoint reached -Automatic selection of PAL NTSC -Buffered video input and output processing, plug and play with all FPV cameras -Integrated GPS backup battery -Integrated temperature sensor, external temperature sensor optional -Current draw 85mA@12V -Provides filtered voltage 5V or 12V for both camera and video transmitter -Automatic selection of voltage input from higher voltage battery -Adjust of most autopilot features via configuration wizard -Dual level throttle management on autopilot mode for optimum battery usage -Upgradeable firmware- requires Pickit -Home setting automatically -Detects R/C link lost by glitch counter or failsafe level -Detection of failsafe on the throttle channel configurable for over or under normal throttle range -Display estimated maximum range left -Board position can be configured by software to be rolled -Neutral attitude adjustable via software -Attitude input from integrated IMU -Attitude input from external IR sensors (optional) -Turn and climb rate display -G-force display -Adjustable artificial horizon size and position -Autopilot controls four servo output channels for regular airplanes with elevator, aileron, throttle and rudder. Supports differential ailerons airplanes and flying wings with elevons -Barometric altitude -Barometric variometer -Barometric pressure -All parameters on the screen redraw at 50-60Hz, high refresh rate for smooth relaxing display UCENKA | комплект | 15128,00 | ||||||||||||||||||||||||||||||
| GLB-87192 | Skylark Tiny OSD III with USB Cable For FPV System (XT60 connectors current sensor) [GLB-87192] | Комплект телеметрии Skylark Tiny OSD III с GPS и выводом информации на экран для FPV моделей, с USB-интерфейсомОсобенности:— Встроенный барометр. — Максимально миниатюрный размер. — Высокоточный 60A датчик тока. — Онлайн обновление прошивок. — Настраиваемый OSD экран. — Разъемы XT60 — Результаты полета — 10Hz GPS, с батарейкой ,3D Fix led indicator. — PAL/NTSC совместимость — Масса : 22.5 грамм — RSSI Auto detected. — Автоматическая установка домашней точки (при включении) OSD отображет: — Скорость | Высота | Расстояние — Направление на домашнюю точку — GPS сигнал — Напряжение силовой батареи — Потребляемый ток — Израсходованная емкость mAh 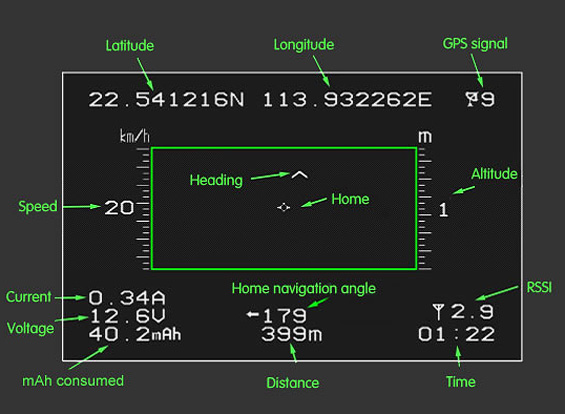      Комплектация: — 10HZ GPS 1шт — Датчик тока 1шт — Основной блок OSD 1шт — Инструкция (English) 1шт — USB-интерфейс 1шт | комплект | 5234,15 | ||||||||||||||||||||||||||||||
| SL-TRACEOSDIVnew-XT60 | Skylark Trace OSD IV (new) for FPV System (built-in 80A current sensor w/XT60) | Комплект телеметрии Skylark Trace OSD IV (интегрированный датчик тока) с GPS и выводом информации на экран для FPV моделей, с USB-интерфейсомОсобенности:— Питание для камеры и видеопередатчика (2A, 12В / 5В на выбор). — Встроенный барометр. — Максимально миниатюрный размер. — Высокоточный 80A датчик тока. — Онлайн обновление прошивок. — Настраиваемый OSD экран. — Результаты полета — 10Hz GPS 5V, с батарейкой ,3D Fix led indicator. — PAL/NTSC совместимость — Входящее напряжение: 3-6S LiPo — Разъемы XT60 — Масса : 48 грамм — RSSI Auto detected. — Автоматическая установка домашней точки (при включении) 
  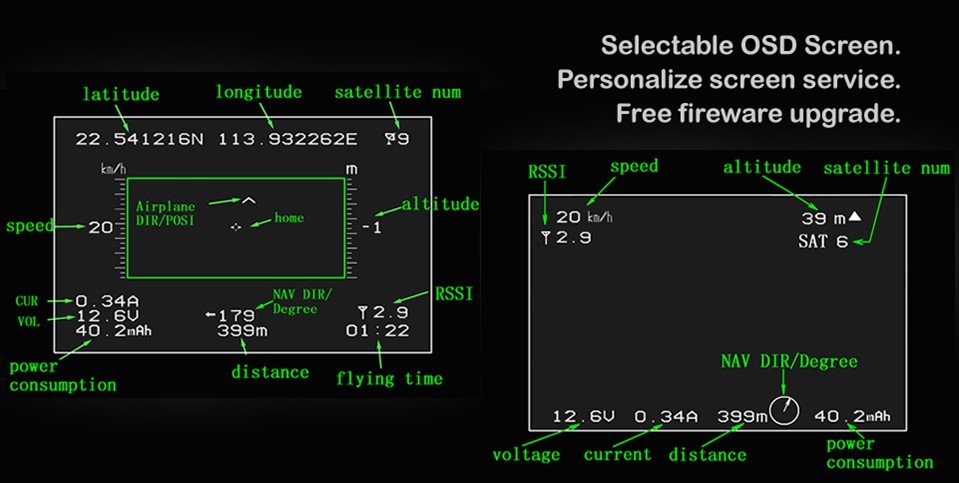 OSD отображет: — Скорость | Высота | Расстояние — Направление на домашнюю точку — GPS сигнал — Напряжение силовой батареи — Потребляемый ток — Израсходованная емкость mAh 
 Комплектация: — 10HZ GPS 1шт — Основной блок OSD со встроенным датчиком тока 1шт — Инструкция (English) 1шт — USB-интерфейс 1шт 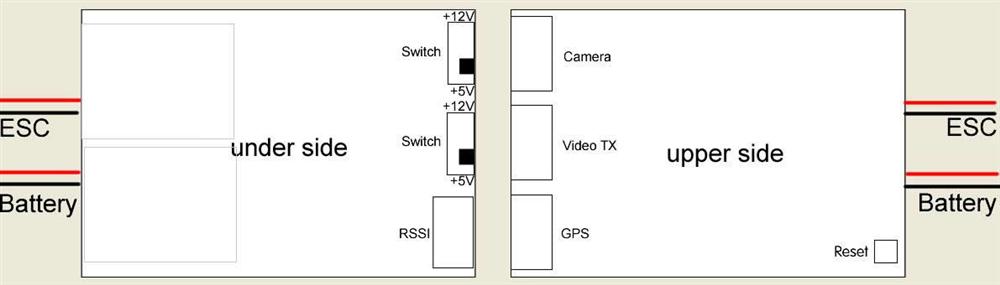 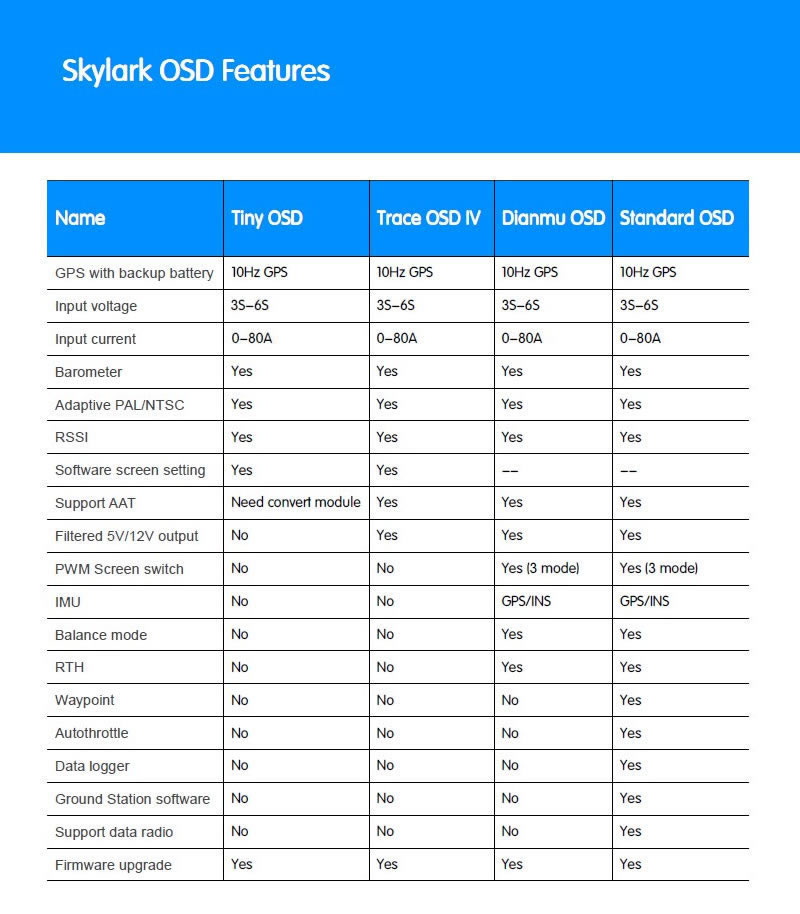 | комплект | 3144,60 | ||||||||||||||||||||||||||||||
| SkS-ST100 | Skystars ST100 M8N GPS Module UBX-M8030 for APM, Pixhawk [SkS-ST100] | Модуль GPS Skystars ST100 Mini M8N UBX-M8030 с компасом для APM, Pixhawk (micro JST 6pin+4pin)Совместим для работы с ПК на прошивках Ardupilot, iNav, Betaflight и пр.Особенности Чип GPS: M8N GPS, с U-Blox UBX-M8030 (M8), 72-канальный Компас: QMC5883L, работающий по той же технологии, что и HMC5983 Антенна: керамическая антенна с высоким коэффициентом усиления 2.5dBi 
  Характеристики: Модель: ST100 mini M8N GPS Точность позиционирования: 0.5м Шаг скорости измерения: 0.1м/с Максимальная высота: 50000м Максимальная скорость: 515м/с Максимальное ускорение: 4G Максимальная скорость обновления: до 10Гц Чувствительность Отслеживание и навигация: -167dBm Обновление: -163dBm Холодный старт: -151dBm Горячий старт: -159dBm Время до первого срабатывания: Холодный старт: 26 сек Горячий старт: 1 сек Питание: 5V DC, 50 - 55mA Порты: GPS UART интерфейс, геомагнитный I2C интерфейс Размеры: 32 х 30 х 12 мм Вес: 22 г GPSmodule | шт. | 911,33 | ||||||||||||||||||||||||||||||
| GLB-109188 | S-OSD OSD Module with Flight Mode for DJI NAZA Lite/V2 GPS [GLB-109188] | Блок S-OSD для передачи телеметрической информации на монитор (через видео канал) для DJI NAZA Lite/V2 GPSОсобенности:Отображение: полетный режим, напряжение силового аккумулятора, высота полета, скорость полета, удаление от точки старта, радар, количество спутников GPS, положение канала газа (0%-100%), качество приема сигнала на приемнике модели (если поддерживается RSSI), авиагоризонт, координаты и пр.   Instruction: GPS Module and LED module connection: 1. GPS and LED: Use 4P-4P connect main controller GPS port and LED port, supply power to flight controller. If S-OSD power light lits, then it is right. 2. Then plug GPS module and LED module at S-OSD port 3. Switch port: The function of switch port is screen switch. There are plenty of contents S-OSD will display, so need two screens display. One time one screen content. The screen switched by transmitter 3-step switch through switch port. 4. Throttle channel: S-OSD could display throttle channel signal data from 0%-100%. Two THRO port on S-OSD, one connects receiver throttle, the other connects flight controller. 5. Attitude cable: connects with flight controller f1/f2 6. RSSI: S-OSD could display receivers signal strength, this port is used to connect receivers RSSI port 7. Voltage detection function: wiring as picture shows 8. Video port: wiring as picture shows  
 
| комплект | 2001,14 | ||||||||||||||||||||||||||||||
| SP-F3-ACRO | SP Racing F3 Acro Flight Controller [SP-F3-ACRO] | Полетный контроллер SP Racing F3 Acro для мультикоптеров, для Cleanflight, Betaflight, iNavSeriously Pro Racing F3 Flight Controller (SPRacingF3) was designed to give awesome flight performance based on tried and tested sensors whilst also providing unparalleled I/O capabilities in a small and extremely lightweight form-factor using a next-generation CPU.The SPRacingF3 gives you all the features you need for the heart of your aircraft, whether you’re into FPV racing, acrobatic flying or aerial photography it’s perfect. Features • No compromise I/O. Use all the features all the time; e.g. Connect your OSD + SmartPort + SBus + GPS + LED Strip + Battery Monitoring + Sonar + 8 motors - all at the same time! • On-board high-capacity black box flight log recorder - optimize your tuning and see the results of your setup without guesswork ( Deluxe). • Next-generation STM32 F3 processor with hardware floating point unit for efficient flight calculations and faster ARM-Cortex M4 core. • Stackable design - perfect for integrating with OSDs and power distribution boards. • 16 PWM I/O lines for ESCs, Servos and legacy receivers. 8 available on standard pin headers. 8 via side mounted connectors. • Full support for OneShot ESCs for easy PID tuning and a sharper response. • Supports SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM, PWM receivers. No external inverters required (built-in). • Dedicated output for programmable LEDs - great for orientation, racing and night flying. • Dedicated I2C port for connection of OLED display without needing flight battery. • Battery monitoring ports for voltage and current. • Sonar support for precision low-altitude hold. • Buzzer port for audible warnings and notifications. • Developer friendly debugging port (SWD) and boot mode selection, unbrickable bootloader. • Symmetrical design for a super tidy wiring. • Wire up using pin headers, JST-SH sockets or solder pads. Use either right-angled or straight pin-headers. • Loop times up to ~2x as fast as previous-generation STM32F1 based boards. • Configuration of the flight controller via a cross-platform GUI (Windows/OSX/Linux). • Supports a variety of aircraft, tricopters, quadcopters, hexacopters, octocopters, planes and more. • Available in Acro and Deluxe versions. Variations Acro: Standard model for racing/acro flying. Deluxe: Additional sensors for altitude and direction. Software The SPRacingF3 runs the open-source Cleanflight flight control (FC) software which has an ever-growing community of friendly developers and users. Being open-source means that you too can contribute to the system. Cleanflight comes with a detailed manual that is reviewed and maintained by the Cleanflight developers and community. No more out-of-date wiki pages and second-hand information. Ensure you reference the manual that is appropriate to your firmware version. Specs: * 36x36mm board with 30.5mm mounting holes. * ~5 grams. * STM32F3 CPU. * High-Capacity Flash (Acro and Deluxe) * MPU6050 accelerometer/gyro * MS5611 barometer (Deluxe only) * HMC5883 compass (Deluxe only) * MicroUSB socket. * 4x 4pin JST-SH sockets (I2C, SWD, 2xUART) * 2x 8pin JST-SH sockets (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND) * 8x 3pin though-holes for pin headers for ESC/Servo connections. * 2x 4pin though-holes for pin headers for 2x serial ports. * 2x 2pin though-holes for pin headers for battery voltage and buzzer. | комплект | 892,47 | ||||||||||||||||||||||||||||||
| SP-F3-DELUXE | SP Racing F3 Deluxe Flight Controller w/MAG, BARO [SP-F3-DELUXE] | Полетный контроллер SP Racing F3 Deluxe для мультикоптеров, для Cleanflight, Betaflight, iNavSeriously Pro Racing F3 Flight Controller (SPRacingF3) was designed to give awesome flight performance based on tried and tested sensors whilst also providing unparalleled I/O capabilities in a small and extremely lightweight form-factor using a next-generation CPU.The SPRacingF3 gives you all the features you need for the heart of your aircraft, whether you’re into FPV racing, acrobatic flying or aerial photography it’s perfect. Features • No compromise I/O. Use all the features all the time; e.g. Connect your OSD + SmartPort + SBus + GPS + LED Strip + Battery Monitoring + Sonar + 8 motors - all at the same time! • On-board high-capacity black box flight log recorder - optimize your tuning and see the results of your setup without guesswork ( Deluxe). • Next-generation STM32 F3 processor with hardware floating point unit for efficient flight calculations and faster ARM-Cortex M4 core. • Stackable design - perfect for integrating with OSDs and power distribution boards. • 16 PWM I/O lines for ESCs, Servos and legacy receivers. 8 available on standard pin headers. 8 via side mounted connectors. • Full support for OneShot ESCs for easy PID tuning and a sharper response. • Supports SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM, PWM receivers. No external inverters required (built-in). • Dedicated output for programmable LEDs - great for orientation, racing and night flying. • Dedicated I2C port for connection of OLED display without needing flight battery. • Battery monitoring ports for voltage and current. • Sonar support for precision low-altitude hold. • Buzzer port for audible warnings and notifications. • Developer friendly debugging port (SWD) and boot mode selection, unbrickable bootloader. • Symmetrical design for a super tidy wiring. • Wire up using pin headers, JST-SH sockets or solder pads. Use either right-angled or straight pin-headers. • Loop times up to ~2x as fast as previous-generation STM32F1 based boards. • Configuration of the flight controller via a cross-platform GUI (Windows/OSX/Linux). • Supports a variety of aircraft, tricopters, quadcopters, hexacopters, octocopters, planes and more. • Available in Acro and Deluxe versions. Variations Acro: Standard model for racing/acro flying. Deluxe: Additional sensors for altitude and direction. Software The SPRacingF3 runs the open-source Cleanflight flight control (FC) software which has an ever-growing community of friendly developers and users. Being open-source means that you too can contribute to the system. Cleanflight comes with a detailed manual that is reviewed and maintained by the Cleanflight developers and community. No more out-of-date wiki pages and second-hand information. Ensure you reference the manual that is appropriate to your firmware version. Specs: * 36x36mm board with 30.5mm mounting holes. * ~5 grams. * STM32F3 CPU. * High-Capacity Flash (Acro and Deluxe) * MPU6050 accelerometer/gyro * MS5611 barometer (Deluxe only) * HMC5883 compass (Deluxe only) * MicroUSB socket. * 4x 4pin JST-SH sockets (I2C, SWD, 2xUART) * 2x 8pin JST-SH sockets (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND) * 8x 3pin though-holes for pin headers for ESC/Servo connections. * 2x 4pin though-holes for pin headers for 2x serial ports. * 2x 2pin though-holes for pin headers for battery voltage and buzzer. | комплект | 1173,20 | ||||||||||||||||||||||||||||||
| SP-F3-DELUXE-GPS-OP | SP Racing F3 Deluxe Flight Controller w/MAG, BARO, GPS Ublox 7 Series [SP-F3-DELUXE-GPS-OP] | Полетный контроллер SP Racing F3 Deluxe для мультикоптеров с модулем GPS, для Cleanflight, Betaflight, iNavSeriously Pro Racing F3 Flight Controller (SPRacingF3) was designed to give awesome flight performance based on tried and tested sensors whilst also providing unparalleled I/O capabilities in a small and extremely lightweight form-factor using a next-generation CPU.The SPRacingF3 gives you all the features you need for the heart of your aircraft, whether you’re into FPV racing, acrobatic flying or aerial photography it’s perfect. Features • No compromise I/O. Use all the features all the time; e.g. Connect your OSD + SmartPort + SBus + GPS + LED Strip + Battery Monitoring + Sonar + 8 motors - all at the same time! • On-board high-capacity black box flight log recorder - optimize your tuning and see the results of your setup without guesswork ( Deluxe). • Next-generation STM32 F3 processor with hardware floating point unit for efficient flight calculations and faster ARM-Cortex M4 core. • Stackable design - perfect for integrating with OSDs and power distribution boards. • 16 PWM I/O lines for ESCs, Servos and legacy receivers. 8 available on standard pin headers. 8 via side mounted connectors. • Full support for OneShot ESCs for easy PID tuning and a sharper response. • Supports SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM, PWM receivers. No external inverters required (built-in). • Dedicated output for programmable LEDs - great for orientation, racing and night flying. • Dedicated I2C port for connection of OLED display without needing flight battery. • Battery monitoring ports for voltage and current. • Sonar support for precision low-altitude hold. • Buzzer port for audible warnings and notifications. • Developer friendly debugging port (SWD) and boot mode selection, unbrickable bootloader. • Symmetrical design for a super tidy wiring. • Wire up using pin headers, JST-SH sockets or solder pads. Use either right-angled or straight pin-headers. • Loop times up to ~2x as fast as previous-generation STM32F1 based boards. • Configuration of the flight controller via a cross-platform GUI (Windows/OSX/Linux). • Supports a variety of aircraft, tricopters, quadcopters, hexacopters, octocopters, planes and more. • Available in Acro and Deluxe versions. Variations Acro: Standard model for racing/acro flying. Deluxe: Additional sensors for altitude and direction. Software The SPRacingF3 runs the open-source Cleanflight flight control (FC) software which has an ever-growing community of friendly developers and users. Being open-source means that you too can contribute to the system. Cleanflight comes with a detailed manual that is reviewed and maintained by the Cleanflight developers and community. No more out-of-date wiki pages and second-hand information. Ensure you reference the manual that is appropriate to your firmware version. Specs: * 36x36mm board with 30.5mm mounting holes. * ~5 grams. * STM32F3 CPU. * High-Capacity Flash (Acro and Deluxe) * MPU6050 accelerometer/gyro * MS5611 barometer (Deluxe only) * HMC5883 compass (Deluxe only) * MicroUSB socket. * 4x 4pin JST-SH sockets (I2C, SWD, 2xUART) * 2x 8pin JST-SH sockets (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND) * 8x 3pin though-holes for pin headers for ESC/Servo connections. * 2x 4pin though-holes for pin headers for 2x serial ports. * 2x 2pin though-holes for pin headers for battery voltage and buzzer. | комплект | 1466,50 | ||||||||||||||||||||||||||||||
| F3_EVO_Brush | SP Racing F3 EVO Brush Flight Controller [SP-F3-EVO_Brush] | Полетный контроллер SP Racing F3 EVO коллекторный для микро мультикоптеровОсобенностиПодключение до 6 коллекторных моторов (до 10А на канал) Поддерживает прошивку CleanFlight, BetaFlight. Крошечные размеры и вес Поддержка приемников SBUS, PPM, DSM Поддержка питания системы 1-2S (выбирается перемычкой) Последовательный порт UART2, UART2, UART3, с выводом внешнего питания до 500мА Встроенный датчик напряжения батареи и выход для буззера Характеристики Название: SP RACING F3 EVO Чип: STM32F303CCT6 Акселерометр: MPU6500 Размеры: 22мм х 32.5мм Толщина: 1.2мм Вес: 3г Комплектация Полетный контроллер SP Racing F3 EVO - 1шт; | комплект | 665,37 | ||||||||||||||||||||||||||||||
| HK747000003-0 | tBeacon V5.51 for Lost Models (тигромаяк) [747000003-0] | Радиомаяк tBeacon V5.51 (тигромаяк)If your multi-rotor or plane has GPS then the tBeacon will help you find a runaway.In conjunction with a UHF handheld radio or setting a timer the tBeacon will help you find it by sending out the GPS coordinates from the onboard GPS receiver. All you need to do is go to this point and collect the runaway. Features: Specifications: | комплект | 2304,50 | ||||||||||||||||||||||||||||||
| TF02-PRO | TF02-Pro 40m LiDAR Distance Sensor by Benewake | Лазерный дальномер TF02 Pro 40m цифровой UART для полетных контроллеров (Ardupilot, Pixhawk)SpecificationsOperating Range: 0.05 ~40 m @90% reflectivity 0.05 ~13.5 m @10% reflectivity 0.05 ~40 m @90% reflectivity (100 Klux) 0.05 ~13.5 m @10% reflectivity (100 Klux) Accuracy: ±5 cm (0.05 ~5 m), ±1% (5~40 m) Distance Resolution: 1 cm Frame rate: 100 Hz Repeatability: 1σ: <2 cm (0.05 ~35 m @90% reflectivity) Ambient light resistance: 100 Klux Operation temperature: -20 ~ 60 °C Protection Level: IP65 Optical Parameters Light source: VCSEL Central wavelength: 850 nm FOV: 3° Photobiological safety: Class 1 (EN60825) Electrical Parameters Supply voltage: DC 5 V ~ 12 V Average Current: ≤200 mA Power consumption: ≤1 W Peak Current: 300 mA Communication level: LVTTL (3.3 V) Communication interface: UART/I2C Other Parameters Weight: 50 g (with cables) Enclosure material: PC/ABS Storage temperature: -30 ~80 °C Cable length: 80 cm Size: 69×41.5×26mm | шт. | 5111,80 | ||||||||||||||||||||||||||||||
| TF-Luna | TF-Luna 8m LiDAR Distance Sensor by Benewake | Лазерный дальномер TF-Luna 8m цифровой UART для полетных контроллеров (Ardupilot, Pixhawk)SpecificationsProduct performance Operating range: 0.2 m ~8 m (90%reflectivity)1 Accuracy: ±6cm at (0.2 - 3 m) 2 | ±2% at (3 - 8 m) Distance resolution: 1 cm Frame rate: 1-250 Hz3 Ambient light immunity: 70 Klux Operation temperature: -10 ~60 °C Optical parameters Light source: VCSEL Central wavelength: 850 nm Photobiological safety: Class1 (IEC60825) FOV: 2°4 Electrical parameters Supply voltage: 3.7 - 5.2 V Average current: 70 mA Power consumption: 0.35 W Peak current: 150 mA Communication level: LVTTL (3.3V) Communication interface: UART / I2C Other Housing: ABS+PC Storage temperature: -20 ~75 °C Weight: <5 g Size: 35 x 21.25 x 12.5 mm (L x W x H) | шт. | 1257,00 | ||||||||||||||||||||||||||||||
| TFmini-PLUS | TFmini Plus 12m LiDAR Distance Sensor by Benewake | Лазерный дальномер TFmini Plus 12m цифровой UART для полетных контроллеров (Ardupilot, Pixhawk)SpecificationsProduct parameters: Operating Range: 0.1m~12m Accuracy: ±5cm @ (0.1-6m), 1% @ (6m-12m) Distance resolution: 5mm Frame rate: 1-1000Hz (adjustable) Ambient light immunity: 70klux Operating temperature: -20 °C ~60 °C Enclosure rating: IP65 Optical parameters: Light source: LED Central wavelength: 850nm FOV: 3.6° Electrical parameters: Supply voltage: 5V ±0.5V Average current: ≤110mA Power consumption: 550mW Peak current: 500mA Communication level: LVTTL (3.3V) Miscellaneous: Material of enclosure: ABS+PC Storage temperature: -20 °C ~75 °C Weight: 11g Wire length: 30cm Size: 35×18.5×21mm | шт. | 2430,20 | ||||||||||||||||||||||||||||||
| SKU108618 | Thunder QQ Super - Multi-Rotor Flight Controller [SKU108618] | Полетный контроллер Thunder QQ Super для квадро- и гексакоптеровМультироторный полетный контроллер Thunder QQ Super имеет 3-х осевой гироскоп и 3-х осевой датчик ускорения с функциией самостабилизации, обеспечивающей сверх устойчивый полет модели. Контроллер поддерживает большинство распространенных приемников, включая Futaba S.BUS, Spektrum, OrangeRX DSM2 и DSMX, а также имеет порт для подключения сателлитных приемников DSM2 и DSMX.Выбор типа приемника и мультироторной системы достаточно прост и осуществляется посредством микропереключателя. Калибровка производится нажатием кнопки "set". После калибровки чувствительности вам потребуется только подрегулировать всего один настроечный резистор, расположенный в передней части платы контроллера. В комплект поставки контроллера входит 4 разъема мама/мама, 2 отрезка двухстороннего скотча, а также небольшая отвертка для настройки контроллера. Конроллер подходит для работы с многороторными системами, имеющими до 6 моторов. Кроме этого, он поддерживает 4 конфигурации мульттироторных систем. Особенности: • Совместим с приемниками Futaba S.BUS, DXM2, DSMX и другими • Очень прост в установке и настройке • Легкий и компактный • Разъем для подключения саттеллитных приемников • Подходит для систем с 4 и 6 моторами • Поддерживает 4 конфигурации мультироторных систем: I-4, X-4, I-6, X-6 
 
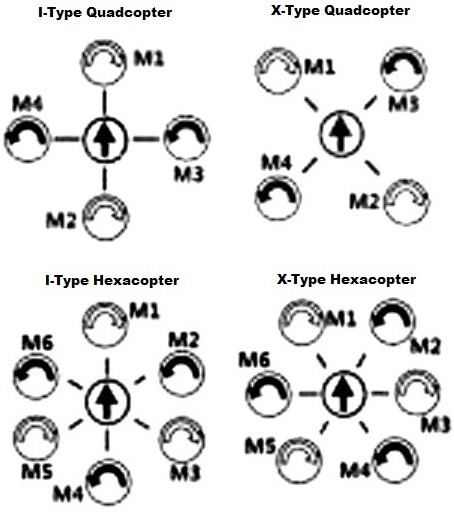 Характеристики: Размеры: 43x29x13мм Вес: 13г Микропроцессор 32BIT ARM Частота сигнала 360Hz Напряжение работы 3.6V-8.4V Потребление 60mA | комплект | 628,08 | ||||||||||||||||||||||||||||||
| TL300D | TL300D Tarot CC3D Openpilot Aircraft Flight Control | Полетный контроллер Tarot CC3D Openpilot (TL300D)Product Description:CC3D openpilot through the machine is suitable for open-source flight control, etc. through the machine 200/250/300 TAROT mini, standard exclusive shock-sided stickers, standard silicone cable 3 (8P one, 4P two) English Description Connection: http: //www.openpilot.org/ Product Specifications: Case Size: 40mm * 40mm * 14mm Bare board size: 36mm * 36mm Bare board NW: 7.3g Shelled Weight: 15.2g | комплект | 1229,35 | ||||||||||||||||||||||||||||||
| TL300L | TL300L Tarot OSD video overlay system / with GPS | Модуль Tarot OSD с GPS модулем (TL300L)Особенности OSD с модулем GPS от Tarot TL300L:Сверхмалый вес, всего 20 г вместе с датчиком GPS Контроль напряжения двух батарей Широкие возможности настройки OSD, отображение любого параметра можно переместить в любое место экрана или отключить Встроенный бародатчик Настройка при помощи кнопки и экранного меню Технические характеристики OSD с модулем GPS от Tarot TL300L: Напряжение : 2-4S Lipo Поддержка сигнала: Pal / NTSC Размеры основной платы: 46х26х8 мм Вес: 20 г (вместе с GPS антенной)  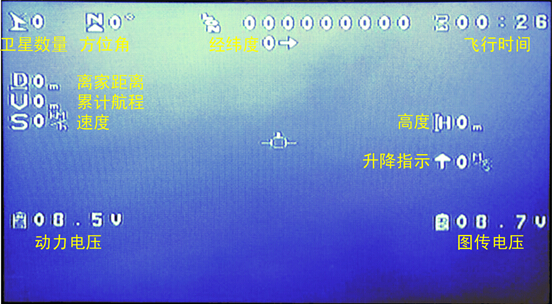 | комплект | 1854,08 | ||||||||||||||||||||||||||||||
| TL8X005 | TL8X005 Tarot Detachable GPS Seat | Съемная стойка Tarot для приемника GPSSpecification:Metal seat:28.3*17.3mm GPS seat:Φ29.4*12mm Metal plug:Φ7*29mm GPSmodule | комплект | 255,90 | ||||||||||||||||||||||||||||||
| Ublox7mini-NZ | Ublox 7 Series Mini GPS for Naze32 series Flight Controller Board [Ublox7mini-NZ] UBLOX-MINI | Мини модуль GPS Ublox 7 для полетных контроллеров серии Naze32Specification:Size 26mm*21mm Weight 8g Wire length 15cm NZ GPS suitable for NAZE32 Series , the plug with 4 2.54mm 1pin plug. Connection diagram: Black to GND Red to +5V Blue to TX Orange to RX GPSmodule | комплект | 761,74 | ||||||||||||||||||||||||||||||
| Ublox7mini-cps-TN | Ublox 7 Series Mini GPS w/Compass for MWC Flight Controller Board [Ublox7mini-cps-TN] | Мини модуль GPS+компас Ublox 7 для полетных контроллеров MWCSpecification:Size: 27mm*27mm Weight: 9g Wire length: 15cm TN GPS: With Compass, suitable for MWC, Rabbit flight controller series GPS with 2.54 pin. GPS pins are 6pcs single pin 2.54 plug. Connection diagram: Black to GND Red to +5V Blue to SDA Orange to SCL Green to TX Yellow to RX GPSmodule | комплект | 1034,62 | ||||||||||||||||||||||||||||||
| Ublox7mini-cps-PX | Ublox 7 Series Mini GPS w/Compass for PX4 Pixhawk Flight Controller Board [Ublox7mini-cps-PX] | Мини модуль GPS+компас Ublox 7 для полетных контроллеров PX4 PixhawkSpecification:Size: 27mm*27mm Weight: 9g Wire length: 15cm PX GPS: for Pixhawk flight control, with electronic compass, the interface is Pixhawk official standard line. Connection diagram: Black to GND Red to +5V Blue to SDA Orange to SCL Green to TX Yellow to RX GPSmodule | комплект | 1034,62 | ||||||||||||||||||||||||||||||
| HK9387000026-0 | UBLOX LEA-6H GPS Module w/Built-in Antenna 2.5m Accuracy V1.01 [9387000026-0/42833] | GPS-модуль UBLOX LEA-6H (версия 1.01) с встроенной антенной высокой точности (2,5м).В этом GPS-модуле интегрированы приёмник LEA-6H со скрытой в керамическом корпусе патч-антенной 25x25x4 мм, последовательный UART интерфейс, и USB. Высокая производительность u-blox LEA-6H позиционирующего процессора позволяет осуществлять навигацию даже по слабому сигналу приёма.Рекомендуется в частности для мультикоптеров, когда точность GPS очень важна. Он имеет активные цепи патч антенны и резервный аккумулятор для теплого старта. Эти элементы загружаются предварительно для использования ArduPilot Mega, и конфигурации файла, доступного в репозитории Google. В этом модуле разъём USB v2.0 совмещает в себе последовательный порт для питания и передачи данных. Особенности: • Разъём micro USB; • модуль Ublox LEA-6H; • частота обновления 5 Гц; • Высокая точность, погрешность порядка 2,5 м; • Патч-антенна 25x25x4 мм. в керамическом корпусе; • Улучшенный режим энергосбережения: снижение потребления энергии на основе интеллектуального; управления электропитанием; • SuperSense® GPS: -160 дБм Чувствительность отслеживания; • МШУ и ПАВ фильтр; • Литиевая резервная батарея 3В; • Низкошумящий стабилизатор 3,3В; • Светодиодные индикаторы питания и настроек; • ArduPilot Mega, MultiWii и Megapirate AIO совместимость 4-контактным разъемом Molex; • Внешние контакты RX, TX, 5V и GND. Примечание: Этот модуль поставляется с символьной скорость 38400, 5 Гц. Технические характеристики: Напряжение питания: 3,5 ~ 6,0 В; Резервное питание: встроенный литиевая батарея, 5 мА; Антенна: 25x25мм. патч антенна; Рабочая температура: -20 ° C ~ 60 ° C; Размеры: 37x37x9 мм; Соединитнльная часть: SMT-плата для 10-пинового разъема, контакты 2,54 мм; Последовательные порты: 1 порт UART, 1 порт USB на напряжение 3 В. GPSmodule | комплект | 4024,81 | ||||||||||||||||||||||||||||||
| GY-NEO6MV2 | Ublox NEO-6M GPS Module 3-5V w/EEPROM [GY-NEO6MV2] | Модуль GPS Ublox NEO-6M GPS Module 3-5V w/EEPROM [GY-NEO6MV3]Характеристики:UART connection Power Supply Range: 3 V to 5 V Model: GY-GPS6MV2 Ceramic antenna EEPROM for saving the configuration data when powered off Backup battery LED signal indicator Antenna Size: 25 x 25 mm Module Size: 25 x 35 mm Mounting Hole Diameter: 3 mm Default Baud Rate: 9600 bps Weight: 18g GPSmodule | шт. | 335,20 | ||||||||||||||||||||||||||||||
| HK387000047-0 | Ublox Neo-7M GPS with Compass and Pedestal Mount [387000047-0/55558] | Ublox Neo-7M - GPS\ГЛОНАСС модуль с компасомGPS\ГЛОНАСС модуль Ublox NEO-7М. Комплект включает в себя цифровой компас HMC5883L, усилитель MAX2659ELT+ и новый навигационный модуль Ublox Нео-7М расчитаный на 56 каналов с частотой обновления 10 Гц для GPS и 1 Гц для ГЛОНАСС. Поставляется в пластиковом корпусе, с удобным креплением, позволющим монтировать модуль по высоте. Новая конструкция печатной платы в сочетании с керамической антеной делает новый модуль 7 серии более чувствительным, предыдущего NEO6. Модуль поставляется со встроенной 3В аккумуляторной батареей резервного питания для быстрого горячего старта, и энергонезависимой I2C EEPROM памятью для хранения данных. Но главное приемущество модуля в том, что он полностью настроен, и готов к использованию с контроллером полета Pixhawk/PX4.Особенности: Спецификация: | комплект | 1987,69 | ||||||||||||||||||||||||||||||
| UBLOX-6H | UBLOX-6H Модуль GPS Ublox LEA-6H с компасом | Модуль GPS Ublox LEA-6H с компасом GPSmodule | комплект | 3588,48 | ||||||||||||||||||||||||||||||
| UBLOX-6M | UBLOX-6M Модуль GPS Ublox NEO-6M с компасом | Модуль GPS Ublox NEO-6M с компасомМодуль GPS Ublox NEO-6M с компасом в пластиковом корпусе.
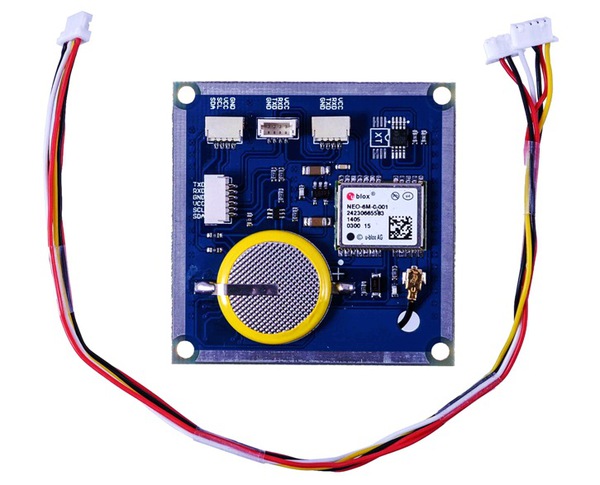 GPSmodule | комплект | 1396,67 | ||||||||||||||||||||||||||||||
| UBLOX-7M | UBLOX-7M Ublox Neo-7M GPS with Compass | Модуль GPS Ublox NEO-7M с компасомGPSmodule | комплект | 1047,50 | ||||||||||||||||||||||||||||||
| UBLOX-M8N | UBLOX-M8N Модуль GPS Ublox NEO-M8N с компасом | Модуль GPS Ublox NEO-M8N с компасом для APM / PixhawkМодуль GPS Ublox NEO-M8N с компасом в пластиковом кейсе. Один из самых быстрых и точных GPS модулей. В сравнении с предыдущими версиями так же имеет более низкое потребление питания и поддержку спутников Глонасс. Идеально подходит для точных и стабильных полетов по карте на воздушных судах.Подходит для контроллеров полета APM, Pixhawk Особенности Быстрый поиск спутников (10 секунд на поиск 6 спутников в космосе) Встроенный компас i2c HMC5883L с частотой обновления 10Гц Поддержка GPS+BD+SBAS, or GPS+GLONASS+SBAS Встроенный одометр и логгер пройденного пути Характеристики Приемник: 72-канальный u-blox M8 engine Поддерживаемые навигационные системы: GPS; Galileo; GLONASS; BeiDou Интерфейсы подключения: UART; USB; SPI; DDC; I2C Магнетометр: Есть Напряжение питания: 1,65 - 3,6 В Ток потребления: 21 мА Комплектация Модуль - 1 шт GPSmodule | комплект | 1015,24 | ||||||||||||||||||||||||||||||
| UBLOX-M8N-CC3D | UBLOX-M8N-CC3D Модуль GPS Ublox NEO-M8N с компасом для CC3D Revolution | Модуль GPS Ublox NEO-M8N с компасом для CC3D RevolutionGPSmodule | комплект | 1611,47 | ||||||||||||||||||||||||||||||
| UBLOX-M8N-PIX | UBLOX-M8N-PIX Модуль GPS Ublox NEO-M8N с компасом | Модуль GPS Ublox NEO-M8N с компасом для Pixhawk / APMМодуль GPS Ublox NEO-M8N с компасом в пластиковом кейсе. Один из самых быстрых и точных GPS модулей. В сравнении с предыдущими версиями так же имеет более низкое потребление питания и поддержку спутников Глонасс. Идеально подходит для точных и стабильных полетов по карте на воздушных судах.Подходит для контроллеров полета APM, Pixhawk Особенности Быстрый поиск спутников (10 секунд на поиск 6 спутников в космосе) Встроенный компас i2c HMC5883L с частотой обновления 10Гц Поддержка GPS+BD+SBAS, or GPS+GLONASS+SBAS Встроенный одометр и логгер пройденного пути Характеристики Приемник: 72-канальный u-blox M8 engine Поддерживаемые навигационные системы: GPS; Galileo; GLONASS; BeiDou Интерфейсы подключения: UART; USB; SPI; DDC; I2C Магнетометр: Есть Напряжение питания: 1,65 - 3,6 В Ток потребления: 21 мА Комплектация Модуль - 1 шт GPSmodule | комплект | 1015,24 | ||||||||||||||||||||||||||||||
| HC-SR04 | Ultrasonic Module HC-SR04 Arduino | Ультразвуковой модуль HC-SR04 для ArduinoПринцип работы ультразвукового датчика измерения расстояния до объекта HC-SR04 был позаимствован у дельфинов и летучих мышей, которые при движении испускают перед собой ультразвуковые колебания и по особенностям их отражения определяют расстояние до объекта.Ультразвуковой модуль HC-SR04 для Arduino прост в использовании и может обеспечить широкий диапазон и высокую точность измерений при стабильных показаниях которые не зависят от солнечного света и цвета объекта. Однако, результаты при приближении к мягким предметам, например шторы или тюль, могут отличатся от действительных и это следует учитывать при разработке. По своему, функционалу и возможностям, ультразвуковой модуль HC-SR04 для Arduino похож на инфракрасный датчик SRF005 от компании Sharp, но при тех же возможностях значительно дешевле его. Ультразвуковой модуль HC-SR04 для Arduino не заменим при конструировании и производстве роботов или многороторных летательных аппаратов для предотвращения их столкновения с препятствием. Характеристики: Напряжение питания: 5В Ток покоя : <2мА Эффективный угол обзора: <15° Диапазон измерения дальности : 2–500 см Разрешение датчика: 0.3см Размеры (ДxШxВ): 45x20x15мм Вес: 8.5г Комплект поставки: Ультразвуковой модуль HC-SR04 - 1шт. | шт. | 90,92 | ||||||||||||||||||||||||||||||
| HK387000005 | Ultrasonic Module HC-SR04 Arduino, w/cables [387000005 / 31136] | Ультразвуковой модуль HC-SR04 для Arduino (c проводами)Принцип работы ультразвукового датчика измерения расстояния до объекта HC-SR04 был позаимствован у дельфинов и летучих мышей, которые при движении испускают перед собой ультразвуковые колебания и по особенностям их отражения определяют расстояние до объекта.Ультразвуковой модуль HC-SR04 для Arduino прост в использовании и может обеспечить широкий диапазон и высокую точность измерений при стабильных показаниях которые не зависят от солнечного света и цвета объекта. Однако, результаты при приближении к мягким предметам, например шторы или тюль, могут отличатся от действительных и это следует учитывать при разработке. По своему, функционалу и возможностям, ультразвуковой модуль HC-SR04 для Arduino похож на инфракрасный датчик SRF005 от компании Sharp, но при тех же возможностях значительно дешевле его. Ультразвуковой модуль HC-SR04 для Arduino не заменим при конструировании и производстве роботов или многороторных летательных аппаратов для предотвращения их столкновения с препятствием. Характеристики: Напряжение питания: 5В Ток покоя : <2мА Эффективный угол обзора: <15° Диапазон измерения дальности : 2–500 см Разрешение датчика: 0.3см Размеры (ДxШxВ): 45x20x15мм Вес: 8.5г Комплект поставки: Ультразвуковой модуль HC-SR04 - 1шт. Набор проводов (шлейф) для коммутации длиной 200мм | шт. | 302,73 | ||||||||||||||||||||||||||||||
| URUAV-UR6 | URUAV UR6 5V 110dB BB Alarm Buzzer Mini Tacker 36x18mm with Lipo Battery LED Light for RC Drone FPV | Звуковой поисковый автономный маяк-пищалка 36x18мм с ярким светодиодом и LiPo аккумулятором, для гоночных дронов и пр.Совместим с полетными контроллерами на Betaflight, Cleanflight и пр. и работает как штатная пищалкаАвтоматически включает звуковую сигнализацию через 30 сек после отключения питания (в случае отстыковки силового аккумулятора остается в рабочем состоянии). Сигнализация отключается нажатием на клавишу более 2 сек. Время автономной работы: до 3 часов 
 Характеристики: Brand Name: URUAV Model: UR6 Item Name: 5V 110dB BB Alarm Buzzer Встроенный аккумулятор и LED светодиод Громкость: 110dB Аккумулятор: 75mAh LiPo Питание: 5В Размеры: 36*18*9мм Масса: 6.8г Комплектация: 1x Buzzer 1x 3P 1.0mm Cable | шт. | 419,00 | ||||||||||||||||||||||||||||||
| URUAV-UR8 | URUAV UR8 5V 110dB BB Alarm Duo Buzzer 31x13mm with Lipo Battery LED Light for RC Drone FPV Racing | Звуковой поисковый автономный маяк-пищалка 31x13мм с двумя динамиками, ярким светодиодом и LiPo аккумулятором, для гоночных дронов и пр.Совместим с полетными контроллерами на Betaflight, Cleanflight и пр. и работает как штатная пищалкаАвтоматически включает звуковую сигнализацию через 30 сек после отключения питания (в случае отстыковки силового аккумулятора остается в рабочем состоянии). Сигнализация отключается нажатием на клавишу более 2 сек. Время автономной работы: до 3 часов 
 Характеристики: Brand Name: URUAV Model: UR8 Item Name: 5V 110dB Duo Buzzer Встроенный аккумулятор и LED светодиод Громкость: 110dB Аккумулятор: 75mAh LiPo Питание: 5В Размеры: 31*13*14мм Масса: 6.5г Комплектация: 1x Buzzer 1x 3P 1.0mm Cable | шт. | 502,80 | ||||||||||||||||||||||||||||||
| USBtoRS232-TTL | USB To RS232 TTL Auto Converter Module For Arduino 5V / 3,3V | USB-интерфейс для плат Arduino и т.п. (5V / 3,3V) | шт. | 145,18 | ||||||||||||||||||||||||||||||
| HK381000147 | USBasp AVR Programming Device for ATMEL proccessors [381000147] (27990) | USB-программатор (6pin) AVR для процессоров ATMELКомплект:программатор USBasp кабель 6-6 Может использоваться для программирования управляющей платы квадрокоптера HobbyKing KK Этим программатором можно прошить Turnigy 9X и Turnigy 9XR на альтернативные прошивки. | комплект | 439,95 | ||||||||||||||||||||||||||||||
| USB-PROG-ATMEL | USBasp AVR Programming Device for ATMEL proccessors [9171000003/21321] | USB-программатор (10pin) AVR для процессоров ATMELПодходит для плат HobbyKing Quadcopter Control Board .Комплект: 1 x USBasp Device 1 x 10-10-6 Cable | комплект | 518,51 | ||||||||||||||||||||||||||||||
| Wing-FC-10DOF | Wing FC-10 DOF Flight Controller INAV OSD Accelerometer Barometer Gyro Compass For RC Airplane Drone | Полетный контроллер Wing FC-10 DOF STM32F405, MPU9250 Acc+Gyro+Compass, INAVOSD, BMP280, 5V BEC & current sensor on board для моделей самолетовНа основе процессора STM32F405 MCU, с частотой до 168MHz, встроенный датчик MPU9250 (трех-осевой гироскоп + трех-осевой акселлерометр + трех-осевой компас) встроенный барометр, нужно установить только GPS модуль для возможности автоматических полетов.Характеристики Монтажные отверстия: 30.5 x 30.5мм, Φ4мм с резиновыми втулками Φ3мм Размеры: 54 x 36 x 13 мм Масса платы: 10г 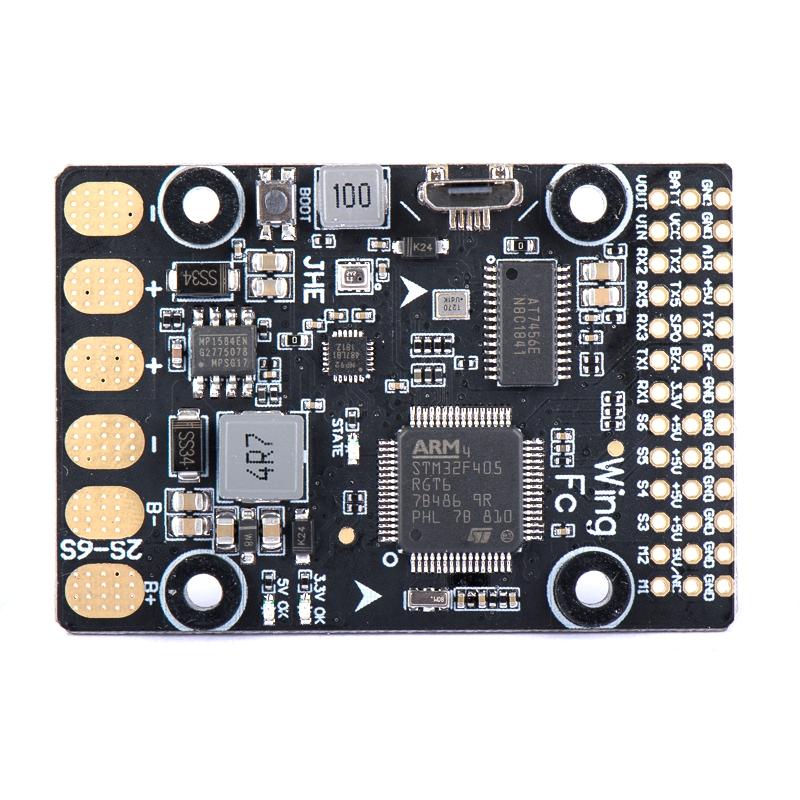
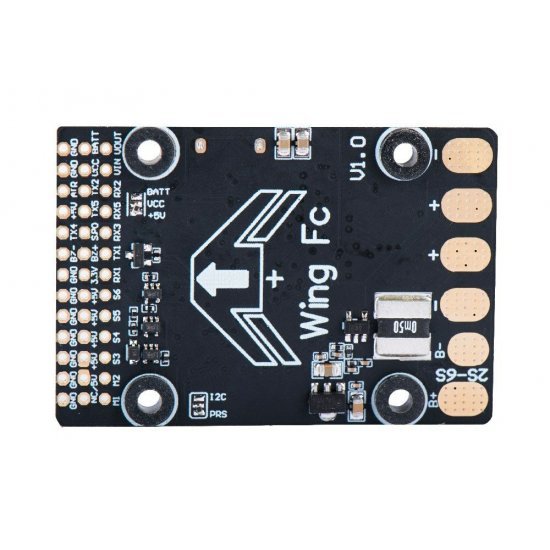 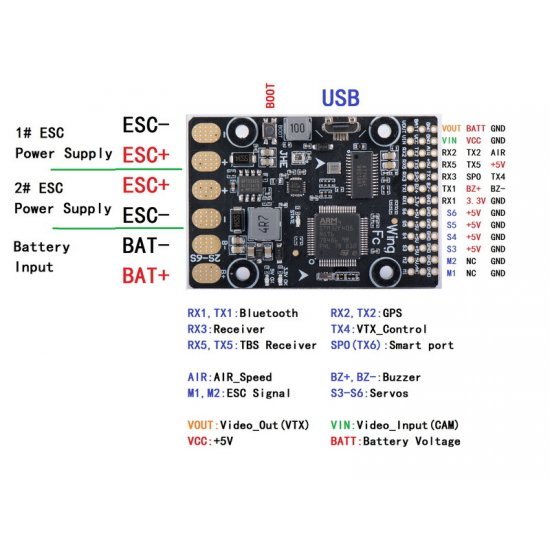
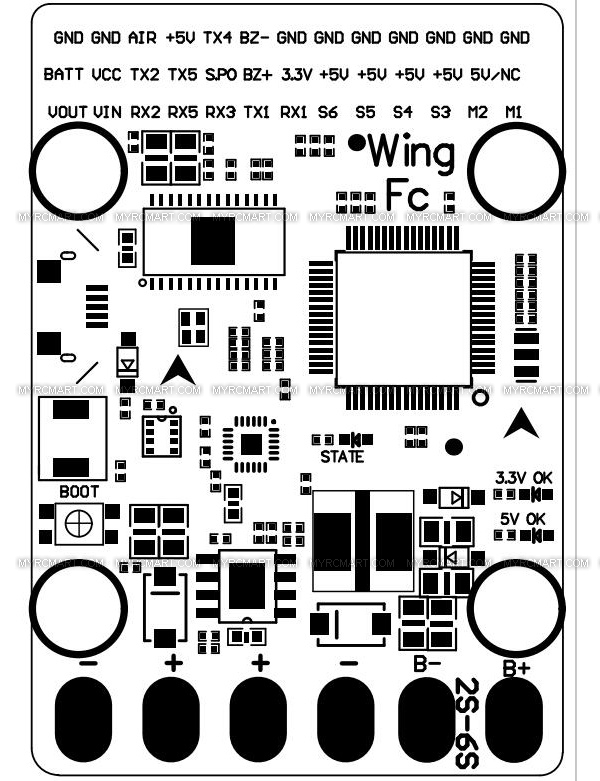 MCU: 168MHz STM32F405 IMU: MPU-9250 accelerometer/gyro/Compass (SPI) Baro: BMP280 (I2C) OSD: INAV OSD w/ AT7456E chip Blackbox: NO VCP & 6x UARTs 2x Motors,4x Servos outputs Built in inverter for RC input (UART3-RX) TBS Receiver: UART5-RX Beeper: Yes Default firmware: inav_1.9.0_FF_F35_LIGHTNING.HEX Reference software: inav-configurator Комплектация 1 x Wing Fc-10 DOF FC 4 x M3 демпферы 1 x разъем XT60 папа 1 x отрезок провода 14 AWG Red 1 x отрезок провода 14 AWG black 2 x набор контактов 2.54мм (горизонтальное или вертикальное подключение) | шт. | 1626,47 | ||||||||||||||||||||||||||||||
| LR2725-24R0002F1 | 0m20 SMD Current Sense Resistor RALEC LR2725-24R0002F1 (0.0002 ±1% 4W ±100ppm/°C) | Шунт-резистор для датчиков тока 0m20 SMD RALEC LR2725-24R0002F1 (0.0002 ±1% 4W ±100ppm/°C) | шт. | 62,85 | ||||||||||||||||||||||||||||||
| LR2725-24R00025F1 | 0m25 SMD Current Sense Resistor RALEC LR2725-24R00025F1 (0.00025 ±1% 4W ±50ppm/°C) | Шунт-резистор для датчиков тока 0m25 SMD RALEC LR2725-24R00025F1 (0.00025 ±1% 4W ±50ppm/°C) | шт. | 62,85 | ||||||||||||||||||||||||||||||
| LR2725-24R0005F1 | 0m50 SMD Current Sense Resistor RALEC LR2725-24R0005F1 (0.0005 ±1% 4W ±50ppm/°C) | Шунт-резистор для датчиков тока 0m50 SMD RALEC LR2725-24R0005F1 (0.0005 ±1% 4W ±50ppm/°C) | шт. | 62,85 | ||||||||||||||||||||||||||||||
| ASPD-PITOT-EXTM | Airspeed Pitot Tube Ext. Mount for Airspeed Sensor | Трубка Пито для датчика воздушной скорости (измерения избыточного, дифференциального давления) подойдет для внешней установки на корпус авиамодели. | комплект | 1047,50 |