|
|
|
HP-FCPIX Hyperion Pixhack 32-bit Ultimate Flight Controller
Полетный контроллер Hyperion Pixhack 2.8.4 32-bit Ultimate Flight Controller
Hyperion quality...
|
 |
| в наличии: |
 -1 /комплект/ -1 /комплект/ |
|
|
|
Полетный контроллер Hyperion Pixhack 2.8.4 32-bit Ultimate Flight Controller
Hyperion quality products!
Основанный на мощной платформе pixhawk с открытым исходным кодом, pixhack 2.8.4 был усовершенствован для обеспечения большего количества функций. Все порты аккуратно смонтированы по бокам, что позволяет горизонтально расположить проводку, а не распределять ее по всему корпусу. Встроенная виброгасящая конструкция обеспечивает постоянную устойчивость летательного аппарата.
Features:
Independent IMU unit, built-in floating vibration absorbing structure
Advanced 32-bit ARM Cortex M4 high performance processor
8 nos PWM/servo output, Support upto 8-axis multi-copters
Automatic & manual mode
Redundancy power input and malfunction shifting function
Multi-color LED
Multi-tone Buzzer port
Removal of ports like SPKT/DSM, CAN
Procedure based on pixhawk, with variety of functions
Ports like GPS/TELEM/POWER are the same as APM 2.5/2.6/2.8
Flight data logginh with Micro SD card
Specifications:
32-BIT 2MB cache STM32F427 Cortex M4,with FPU.
Basic frequency: 168MHZ, 256K RAM
32-BIT STM32F103 backup coprocessor
L3GD20 3-axis 16-bit digital GYRO
LSM303D 3-axis 14-bit accelerometer/magnetometer
MPU6000 6-axis accelerometer/magnetometer
MS5611 high precision barometer
Size: 69x45x16mm
Weight: 33g
Connector Ports:
Futaba SBUS support
PPM signal input
PWM signal output
I2C port(1.25mm spacing, 4pin, JST) x 1
Telemetry prots(1.25mm spacing, 5pin JST) x 2
Powermodule port(1.25mm spacing, 6pin JST) x 1
GPS port(1.25mm spacing, 5pin JST) x 1
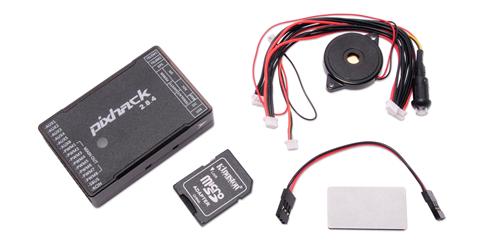
Included with the package:
Pixhack 2.8.4 flight controller x 1
Safety switch x 1
Buzzer x 1
Micro SD card x 1
SD card reader x 1
Cables x 2
*PX4/Pixhawk is an independent, open-source, open-hardware project aiming at providing a high-end autopilot to the academic, hobby and industrial communities (BSD licensed)
**The reference to APM refers to the ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license.
|
|
|
|
|
|